
一种机器人行走轴.pdf

一只****懿呀


1/7

2/7
3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人行走轴.pdf
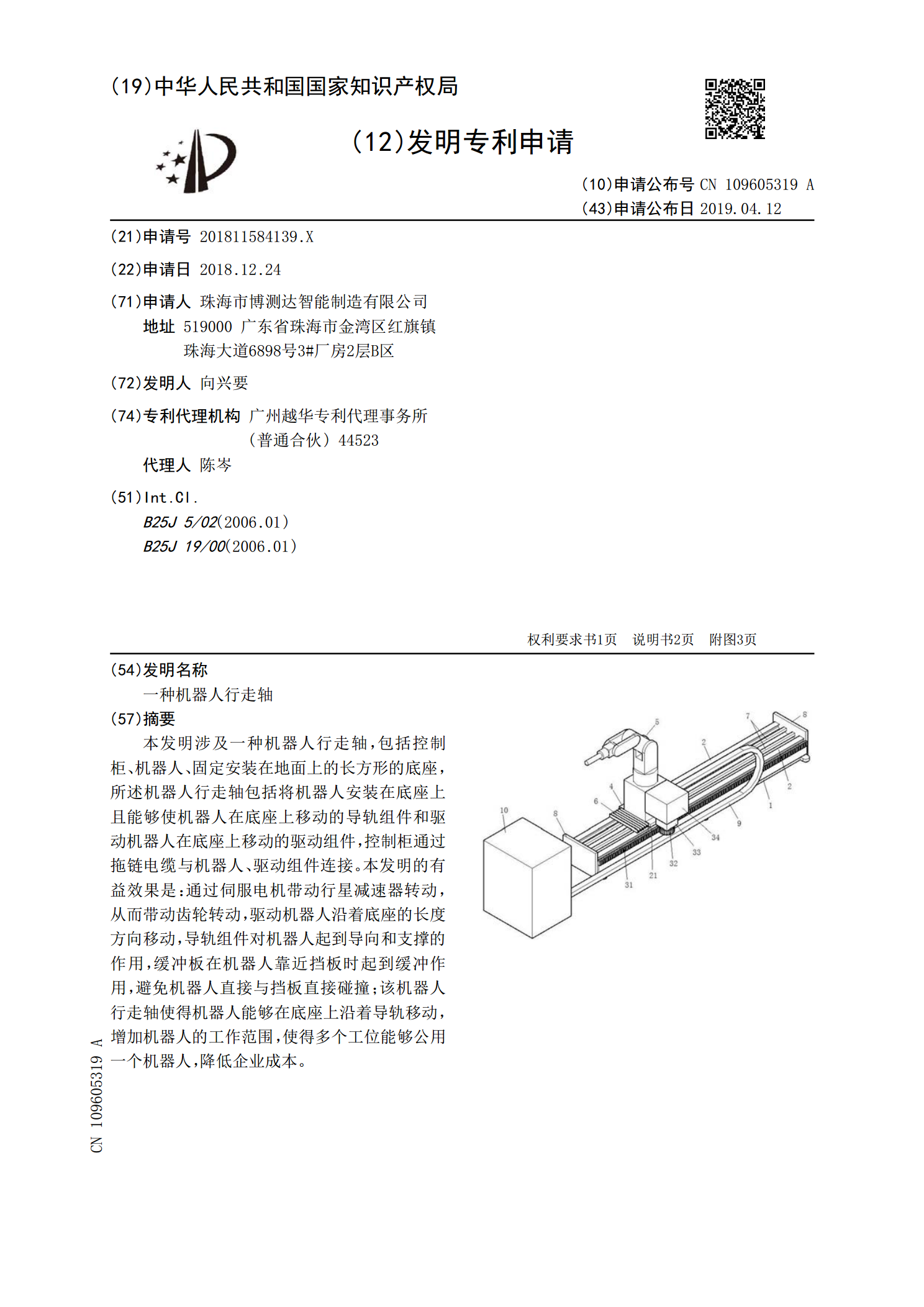
本发明涉及一种机器人行走轴,包括控制柜、机器人、固定安装在地面上的长方形的底座,所述机器人行走轴包括将机器人安装在底座上且能够使机器人在底座上移动的导轨组件和驱动机器人在底座上移动的驱动组件,控制柜通过拖链电缆与机器人、驱动组件连接。本发明的有益效果是:通过伺服电机带动行星减速器转动,从而带动齿轮转动,驱动机器人沿着底座的长度方向移动,导轨组件对机器人起到导向和支撑的作用,缓冲板在机器人靠近挡板时起到缓冲作用,避免机器人直接与挡板直接碰撞;该机器人行走轴使得机器人能够在底座上沿着导轨移动,增加机器人的工作
一种机器人行走轴.pdf
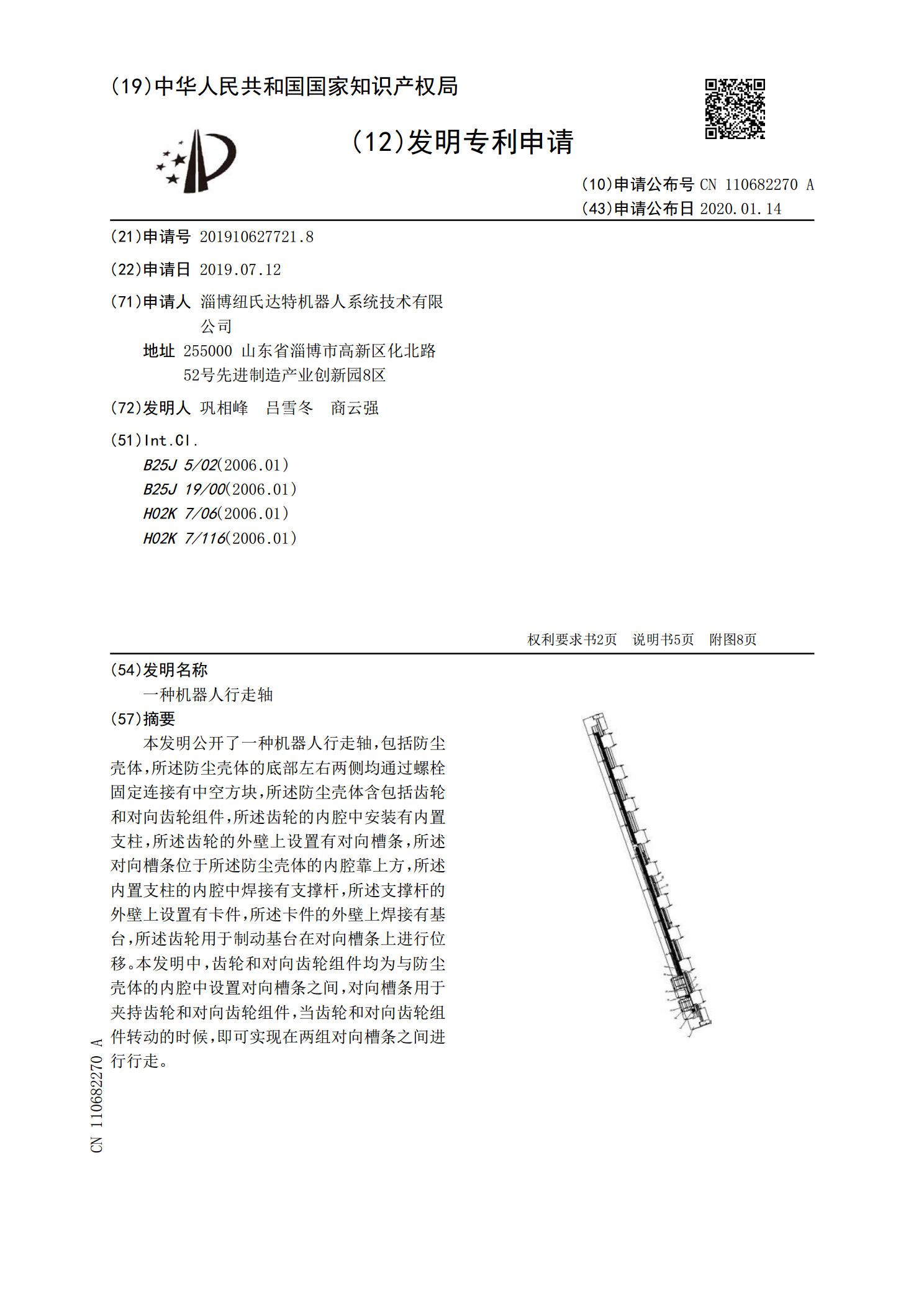
本发明公开了一种机器人行走轴,包括防尘壳体,所述防尘壳体的底部左右两侧均通过螺栓固定连接有中空方块,所述防尘壳体含包括齿轮和对向齿轮组件,所述齿轮的内腔中安装有内置支柱,所述齿轮的外壁上设置有对向槽条,所述对向槽条位于所述防尘壳体的内腔靠上方,所述内置支柱的内腔中焊接有支撑杆,所述支撑杆的外壁上设置有卡件,所述卡件的外壁上焊接有基台,所述齿轮用于制动基台在对向槽条上进行位移。本发明中,齿轮和对向齿轮组件均为与防尘壳体的内腔中设置对向槽条之间,对向槽条用于夹持齿轮和对向齿轮组件,当齿轮和对向齿轮组件转动的时

一种机器人行走轴装置.pdf
本实用新型公开了一种机器人行走轴装置,包括地轨底座(1),其两侧分别固定一面安装板(2),安装板(2)的下方固定有直线导轨(3)和齿条(4);地轨底座(1)的上方设有移动平台(5),移动平台(5)的两侧均连有侧板(6)和导向板(7),导向板(7)上固定有移动块(8),移动块(8)与直线导轨(3)形成滑动导向配合;移动平台(5)的一侧连有伺服电机(9),伺服电机(9)的输出端向下与驱动齿轮(10)相连,驱动齿轮(10)与齿条(4)相互啮合。本实用新型的优点是可对直线导轨进行有效防护,提高生产安全性,减小设备
一种机器人行走轴装置.pdf
本实用新型公开了一种机器人行走轴装置,包括地轨底座(1),其两侧分别固定一面安装板(2),安装板(2)的下方固定有直线导轨(3)和齿条(4);地轨底座(1)的上方设有移动平台(5),移动平台(5)的两侧均连有侧板(6)和导向板(7),导向板(7)上固定有移动块(8),移动块(8)与直线导轨(3)形成滑动导向配合;移动平台(5)的一侧连有伺服电机(9),伺服电机(9)的输出端向下与驱动齿轮(10)相连,驱动齿轮(10)与齿条(4)相互啮合。本实用新型的优点是可对直线导轨进行有效防护,提高生产安全性,减小设备
一种机器人行走轴的加工工艺.pdf
本申请提出了一种机器人行走轴的加工工艺,涉及机器人行走轴加工技术领域。一种机器人行走轴的加工工艺,包括如下步骤:将行走轴工件经过加热炉恒温加热后,取出自然冷却,去除表面杂质,得到一次处理工件;将一次处理工件经过车削加工,在一次处理工件按照对称加工的方式磨削车出沟道,再磨削对称的沟道,得到二次处理工件;将二次处理工件进行经过渗碳、淬火、清洗、回火处理;将回火处理后的工件进行再次磨削,得到机器人行走轴成品。本申请提供的机器人行走轴的加工工艺处理后的机器人行走轴具有很好的耐高温性能、抗压性能以及结构稳定性,在高