
一种同步带传动型高精度机械臂关节.pdf

韶敏****ab


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种同步带传动型高精度机械臂关节.pdf
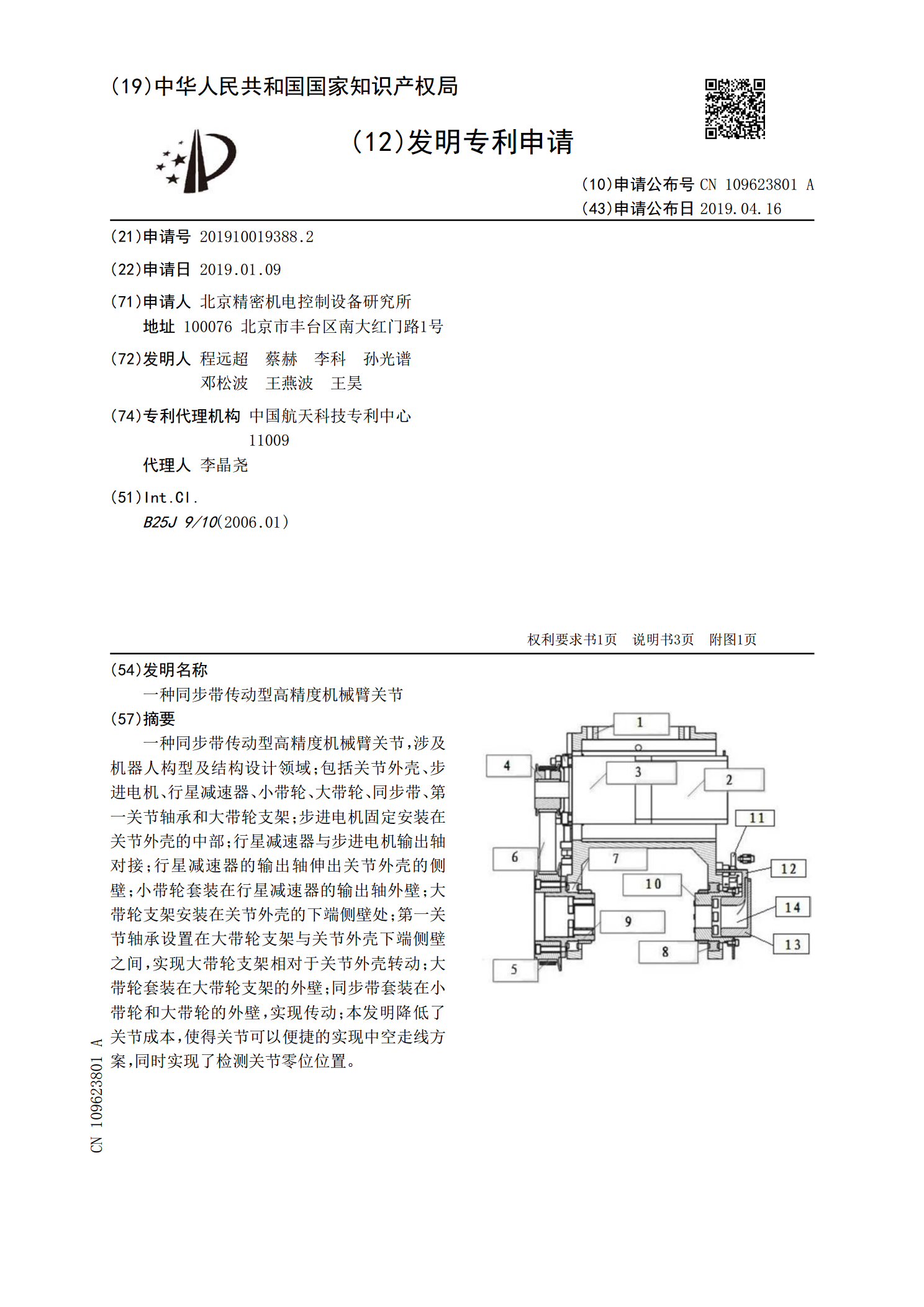
一种同步带传动型高精度机械臂关节,涉及机器人构型及结构设计领域;包括关节外壳、步进电机、行星减速器、小带轮、大带轮、同步带、第一关节轴承和大带轮支架;步进电机固定安装在关节外壳的中部;行星减速器与步进电机输出轴对接;行星减速器的输出轴伸出关节外壳的侧壁;小带轮套装在行星减速器的输出轴外壁;大带轮支架安装在关节外壳的下端侧壁处;第一关节轴承设置在大带轮支架与关节外壳下端侧壁之间,实现大带轮支架相对于关节外壳转动;大带轮套装在大带轮支架的外壁;同步带套装在小带轮和大带轮的外壁,实现传动;本发明降低了关节成本,

基于混合传动的关节型轻型机械臂.pdf
本发明涉及一种基于混合传动的关节型轻型机械臂。底板安装在需要搭载机械臂的平台上;旋转平台通过轴承用过盈配合固定在底座上;电机通过螺栓固定在底板上,电机的轴插入旋转平台的底部以带动旋转平台转动;直线电机两侧的轴插入旋转平台缺口的孔中;圆柱螺母通过螺纹旋合在直线电机的丝杠上,并插入到第一臂的中部的孔中;第一臂下端铰接在旋转平台上端;电机和电机分别粘合在第二臂两端的孔中;第二臂左端电机的轴插入到第一臂上端的孔中;第二臂右端电机的轴插入第三臂左端的孔中。本发明利用传统机械传动方式的组合,实现机械臂功能,结合螺旋传

具有同步带传动装置的机械臂.pdf
本发明公开了具有同步带传动装置的机械臂,涉及机械臂技术领域。具有同步带传动装置的机械臂,包括前臂和后臂,所述前臂和后臂之间铰接,还包括至少一组带传动装置,所述后臂上设置用于驱动带传动装置转动的电机,所述电机输出轴上安装主动轮,所述前臂上固定设置与电机输出轴平行的固定轴,带传动装置中的从动轮安装在固定轴上,主动轮的直径小于从动轮的直径。本发明的有益效果在于:它结构简单,传动精度高,成本低。
一种多级传动机构自锁式紧凑型机械臂关节.pdf
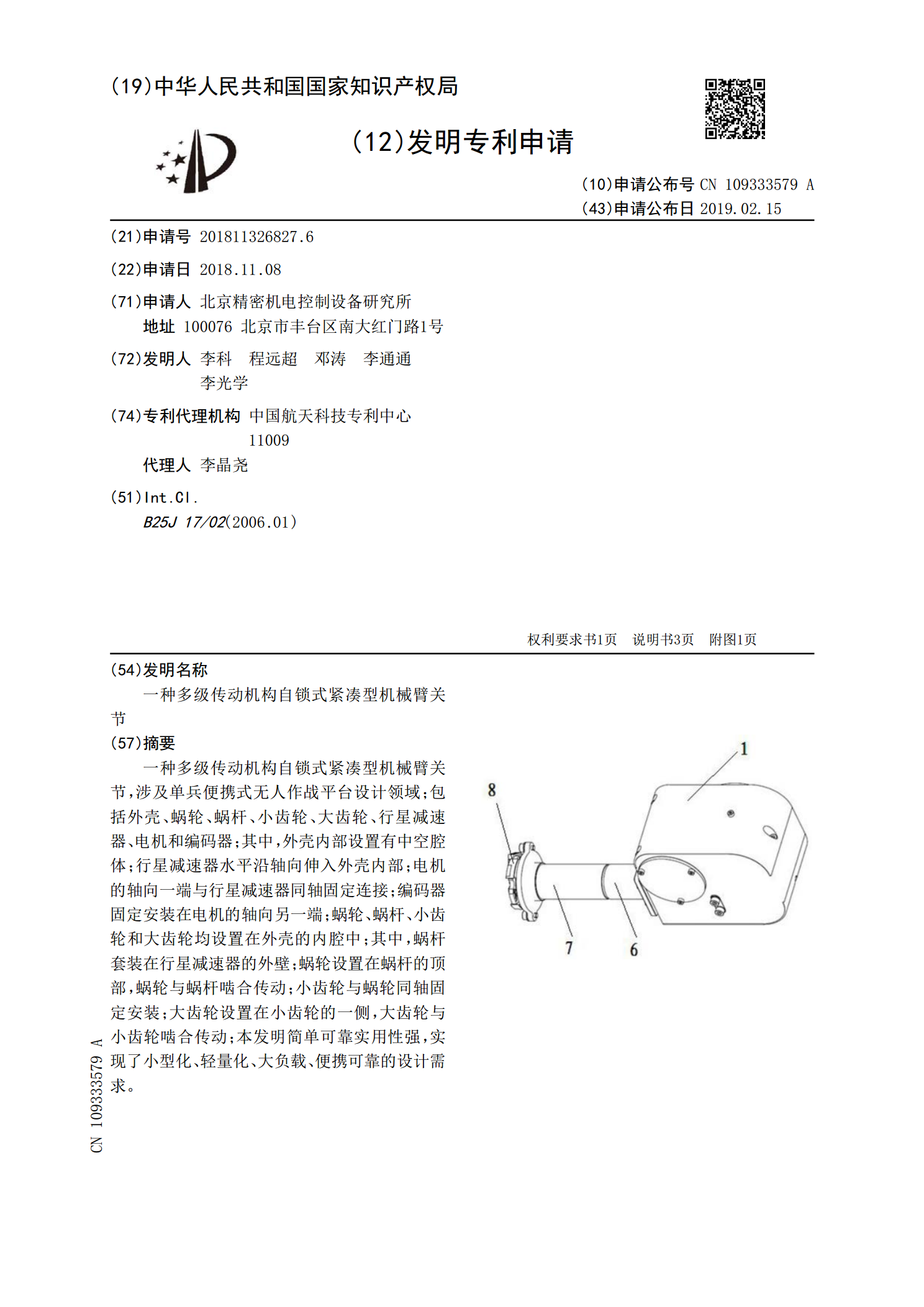
一种多级传动机构自锁式紧凑型机械臂关节,涉及单兵便携式无人作战平台设计领域;包括外壳、蜗轮、蜗杆、小齿轮、大齿轮、行星减速器、电机和编码器;其中,外壳内部设置有中空腔体;行星减速器水平沿轴向伸入外壳内部;电机的轴向一端与行星减速器同轴固定连接;编码器固定安装在电机的轴向另一端;蜗轮、蜗杆、小齿轮和大齿轮均设置在外壳的内腔中;其中,蜗杆套装在行星减速器的外壁;蜗轮设置在蜗杆的顶部,蜗轮与蜗杆啮合传动;小齿轮与蜗轮同轴固定安装;大齿轮设置在小齿轮的一侧,大齿轮与小齿轮啮合传动;本发明简单可靠实用性强,实现了小
一种密封型机械臂关节结构.pdf
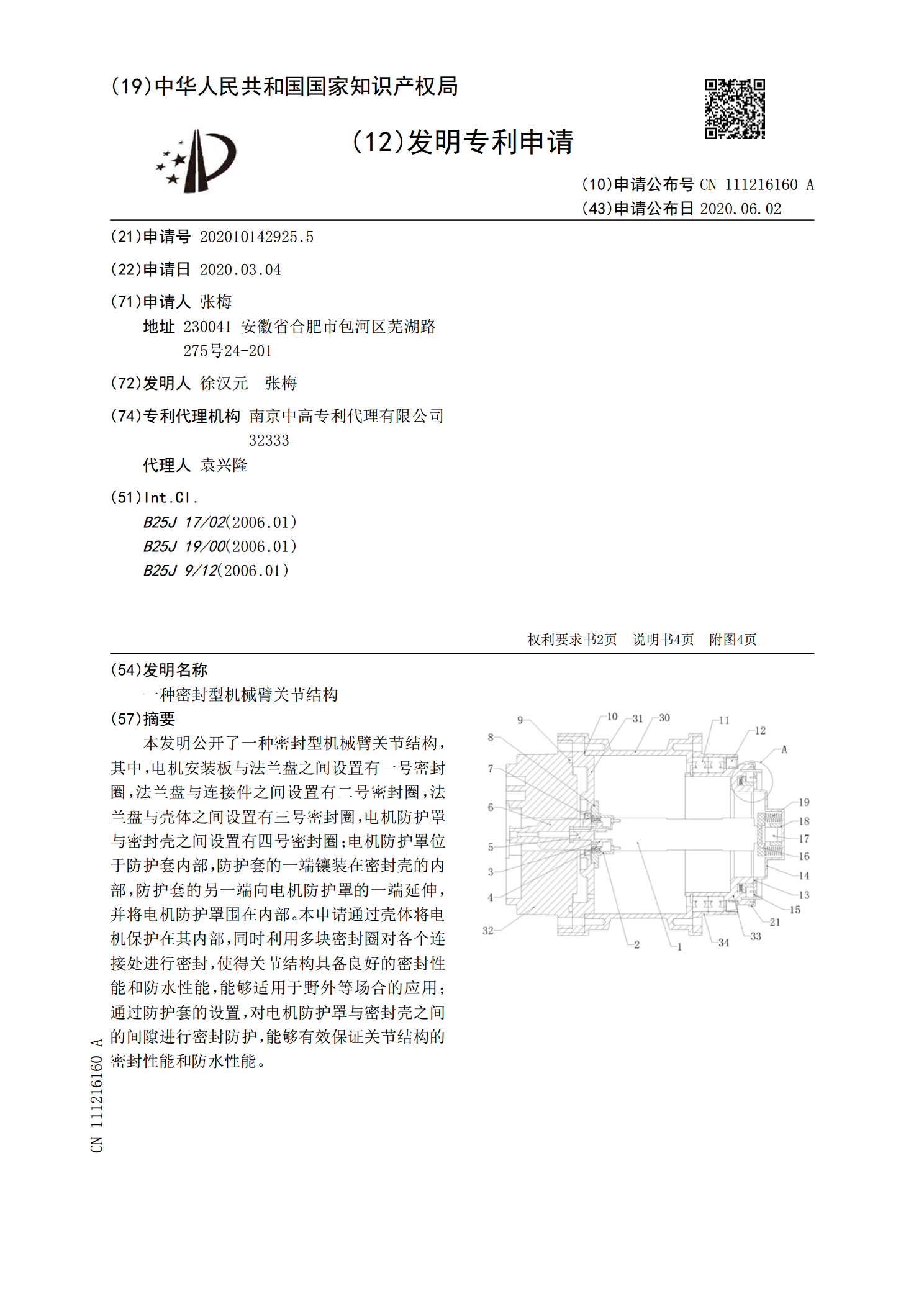
本发明公开了一种密封型机械臂关节结构,其中,电机安装板与法兰盘之间设置有一号密封圈,法兰盘与连接件之间设置有二号密封圈,法兰盘与壳体之间设置有三号密封圈,电机防护罩与密封壳之间设置有四号密封圈;电机防护罩位于防护套内部,防护套的一端镶装在密封壳的内部,防护套的另一端向电机防护罩的一端延伸,并将电机防护罩围在内部。本申请通过壳体将电机保护在其内部,同时利用多块密封圈对各个连接处进行密封,使得关节结构具备良好的密封性能和防水性能,能够适用于野外等场合的应用;通过防护套的设置,对电机防护罩与密封壳之间的间隙进行