
基于混合传动的关节型轻型机械臂.pdf

海昌****姐淑


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于混合传动的关节型轻型机械臂.pdf
本发明涉及一种基于混合传动的关节型轻型机械臂。底板安装在需要搭载机械臂的平台上;旋转平台通过轴承用过盈配合固定在底座上;电机通过螺栓固定在底板上,电机的轴插入旋转平台的底部以带动旋转平台转动;直线电机两侧的轴插入旋转平台缺口的孔中;圆柱螺母通过螺纹旋合在直线电机的丝杠上,并插入到第一臂的中部的孔中;第一臂下端铰接在旋转平台上端;电机和电机分别粘合在第二臂两端的孔中;第二臂左端电机的轴插入到第一臂上端的孔中;第二臂右端电机的轴插入第三臂左端的孔中。本发明利用传统机械传动方式的组合,实现机械臂功能,结合螺旋传

基于DSPFPGA的模块化柔性关节轻型机械臂.docx
基于DSPFPGA的模块化柔性关节轻型机械臂摘要本文介绍了基于DSPFPGA的模块化柔性关节轻型机械臂。该机械臂采用了模块化设计,通过柔性关节实现了机械臂的柔性运动,同时采用了DSP和FPGA技术进行控制。该机械臂不仅具有轻型化、模块化、柔性化的特点,还能够实现高精度的位置控制和力控制,具有广泛的应用前景。关键词:DSPFPGA、模块化、柔性关节、机械臂、位置控制、力控制AbstractThispaperintroducesamodular,flexiblejoint,lightweightrobotic
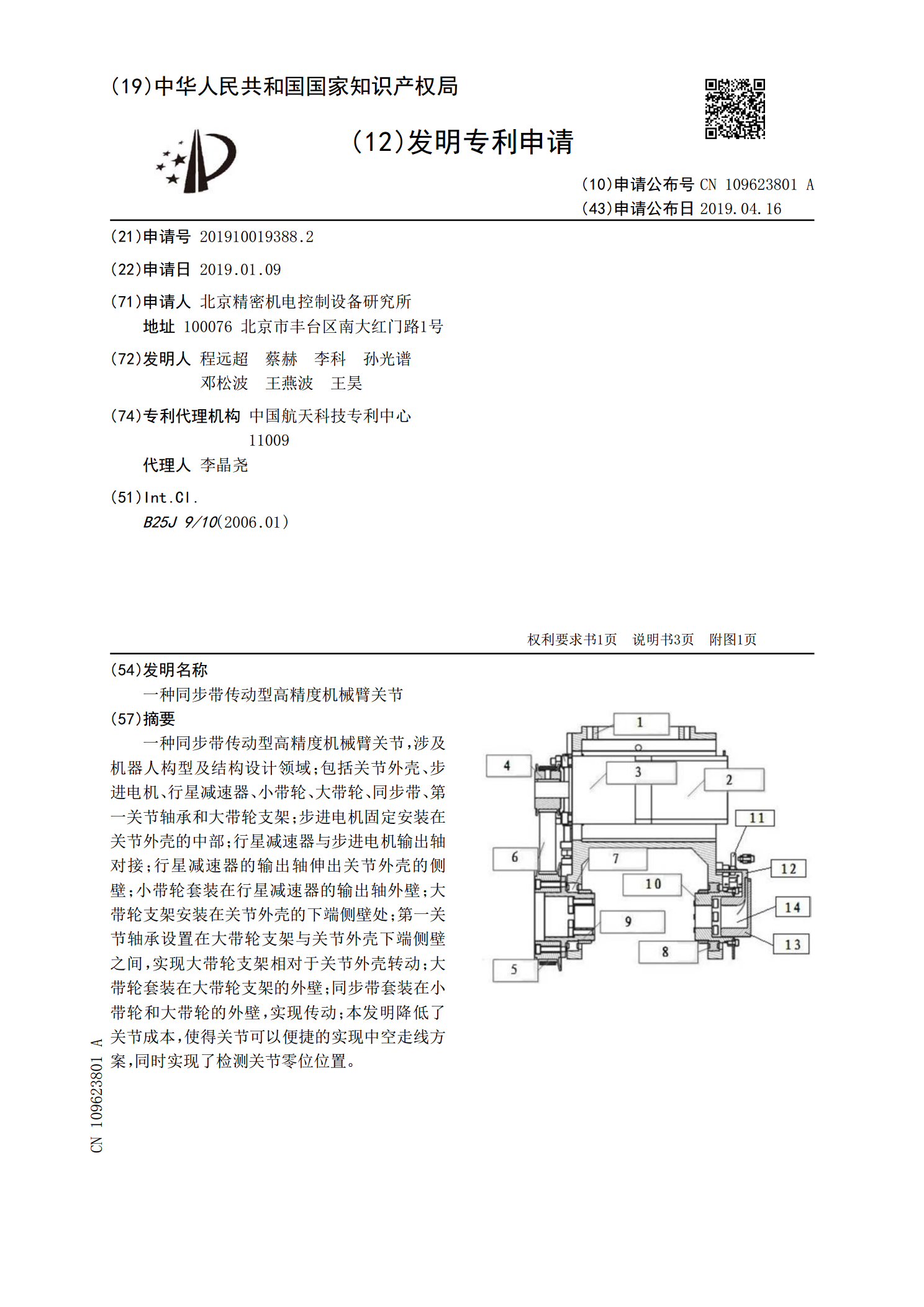
一种同步带传动型高精度机械臂关节.pdf
一种同步带传动型高精度机械臂关节,涉及机器人构型及结构设计领域;包括关节外壳、步进电机、行星减速器、小带轮、大带轮、同步带、第一关节轴承和大带轮支架;步进电机固定安装在关节外壳的中部;行星减速器与步进电机输出轴对接;行星减速器的输出轴伸出关节外壳的侧壁;小带轮套装在行星减速器的输出轴外壁;大带轮支架安装在关节外壳的下端侧壁处;第一关节轴承设置在大带轮支架与关节外壳下端侧壁之间,实现大带轮支架相对于关节外壳转动;大带轮套装在大带轮支架的外壁;同步带套装在小带轮和大带轮的外壁,实现传动;本发明降低了关节成本,
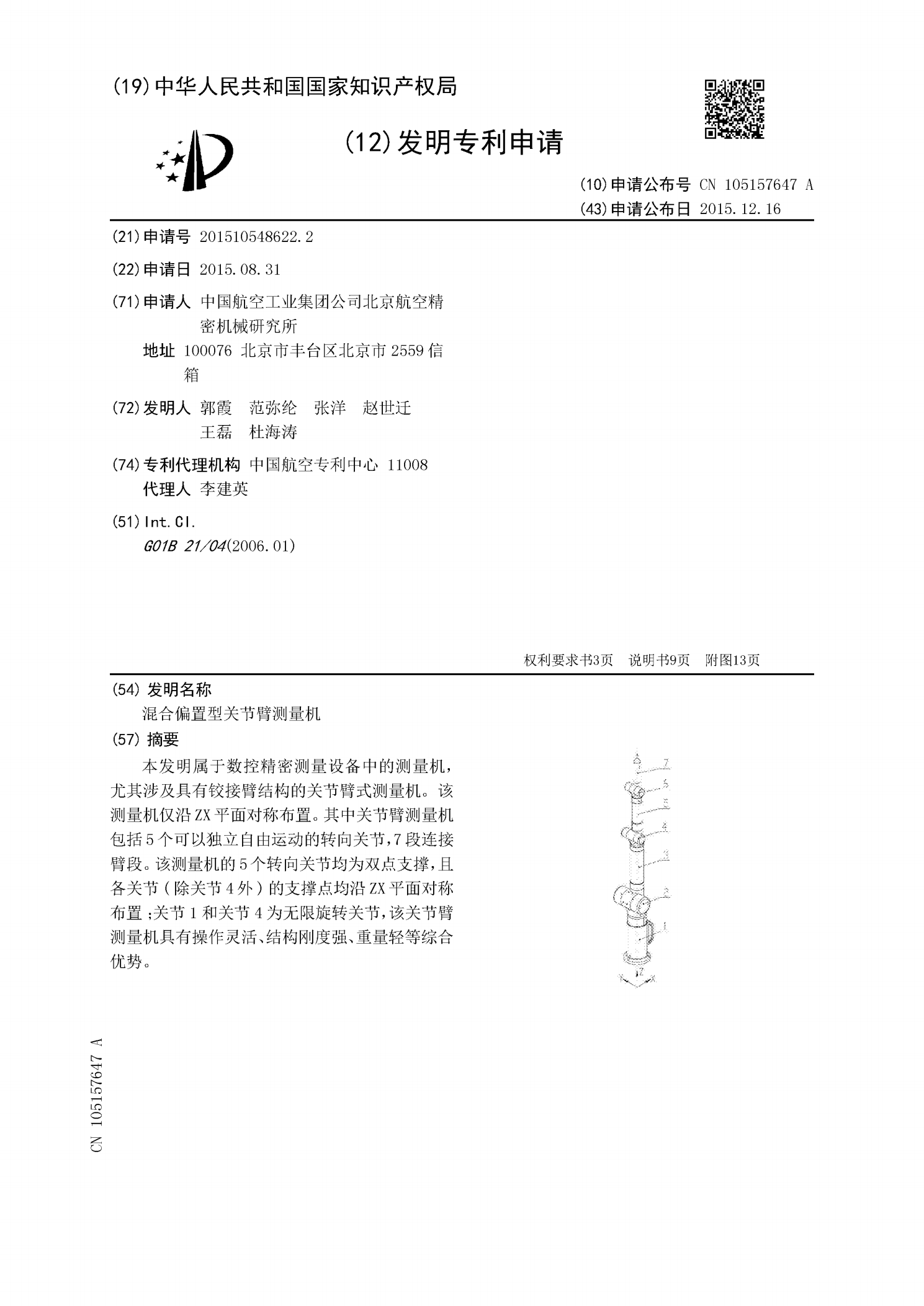
混合偏置型关节臂测量机.pdf
本发明属于数控精密测量设备中的测量机,尤其涉及具有铰接臂结构的关节臂式测量机。该测量机仅沿ZX平面对称布置。其中关节臂测量机包括5个可以独立自由运动的转向关节,7段连接臂段。该测量机的5个转向关节均为双点支撑,且各关节(除关节4外)的支撑点均沿ZX平面对称布置;关节1和关节4为无限旋转关节,该关节臂测量机具有操作灵活、结构刚度强、重量轻等综合优势。
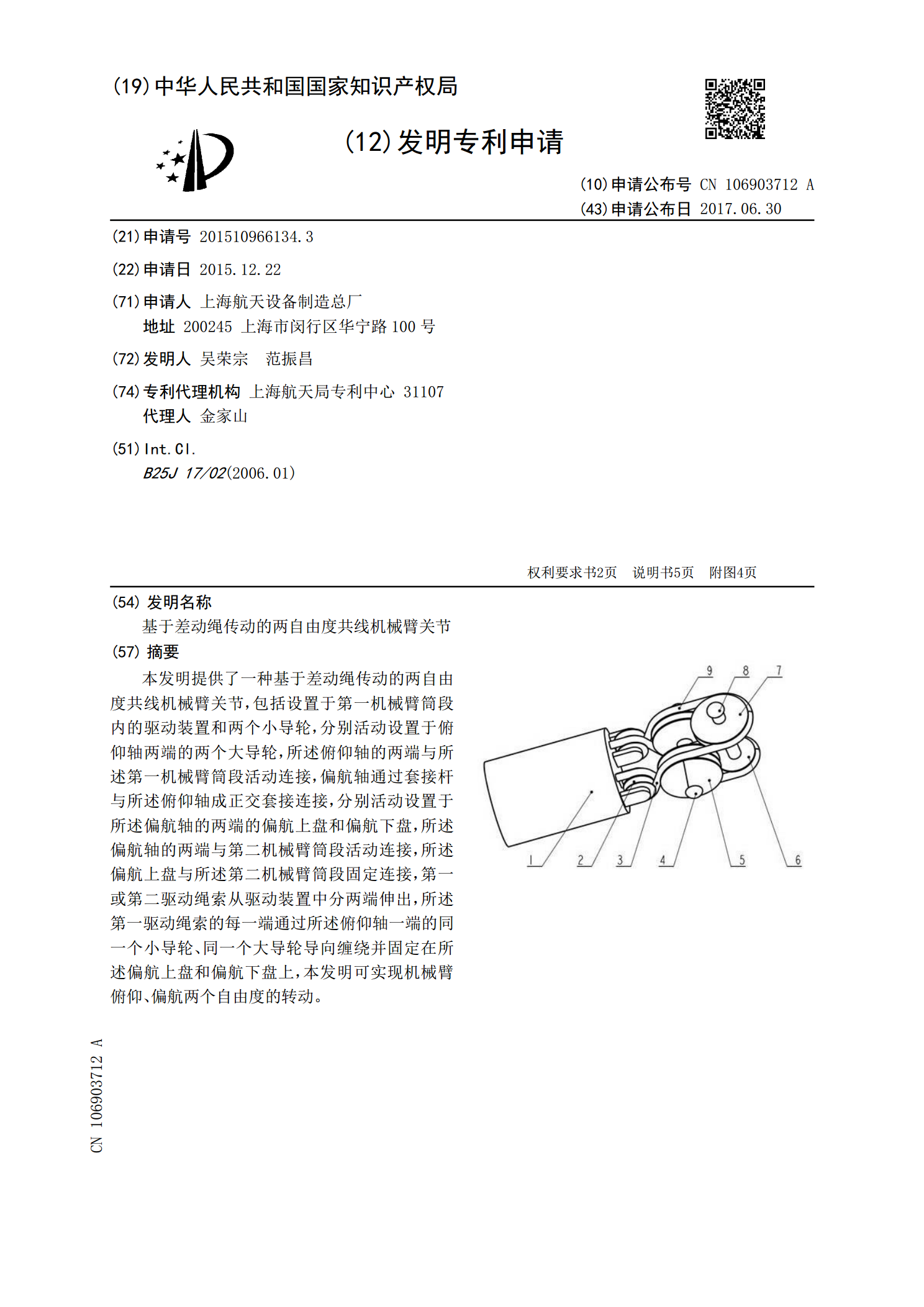
基于差动绳传动的两自由度共线机械臂关节.pdf
本发明提供了一种基于差动绳传动的两自由度共线机械臂关节,包括设置于第一机械臂筒段内的驱动装置和两个小导轮,分别活动设置于俯仰轴两端的两个大导轮,所述俯仰轴的两端与所述第一机械臂筒段活动连接,偏航轴通过套接杆与所述俯仰轴成正交套接连接,分别活动设置于所述偏航轴的两端的偏航上盘和偏航下盘,所述偏航轴的两端与第二机械臂筒段活动连接,所述偏航上盘与所述第二机械臂筒段固定连接,第一或第二驱动绳索从驱动装置中分两端伸出,所述第一驱动绳索的每一端通过所述俯仰轴一端的同一个小导轮、同一个大导轮导向缠绕并固定在所述偏航上盘