
用于在机库中导航飞行器的系统和方法.pdf

猫巷****婉慧


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于在机库中导航飞行器的系统和方法.pdf
本发明涉及一种用于在机库中导航飞行器(12)的系统(10),该系统具有至少一个与该飞行器(12)牢固连接的光学传感器(16、18),其中借助于该传感器(16、18)能够连续地测定相对于该飞行器(12)的环境轮廓数据,并且具有与该传感器(16、18)相连的数据处理设备(20),该数据处理设备具有数据存储器(22),在该数据存储器上存储有参考数据,其中借助于该数据处理设备(20)通过连续比较所获取的环境轮廓数据与该参考数据能够测定飞行器的实际位置(64),并且通过将所获取的实际位置(64)与所存储的目标位置(

用于在机库中导航飞行器的系统和方法.pdf
本发明涉及一种用于在机库中导航飞行器(12)的系统(10),该系统具有至少一个与该飞行器(12)牢固连接的光学传感器(16、18),其中借助于该传感器(16、18)能够连续地测定相对于该飞行器(12)的环境轮廓数据,并且具有与该传感器(16、18)相连的数据处理设备(20),该数据处理设备具有数据存储器(22),在该数据存储器上存储有参考数据,其中借助于该数据处理设备(20)通过将所测定的环境轮廓数据与该参考数据进行连续比较能够检测到飞行器碰撞危险。
一种用于导航飞行器的系统和方法.pdf
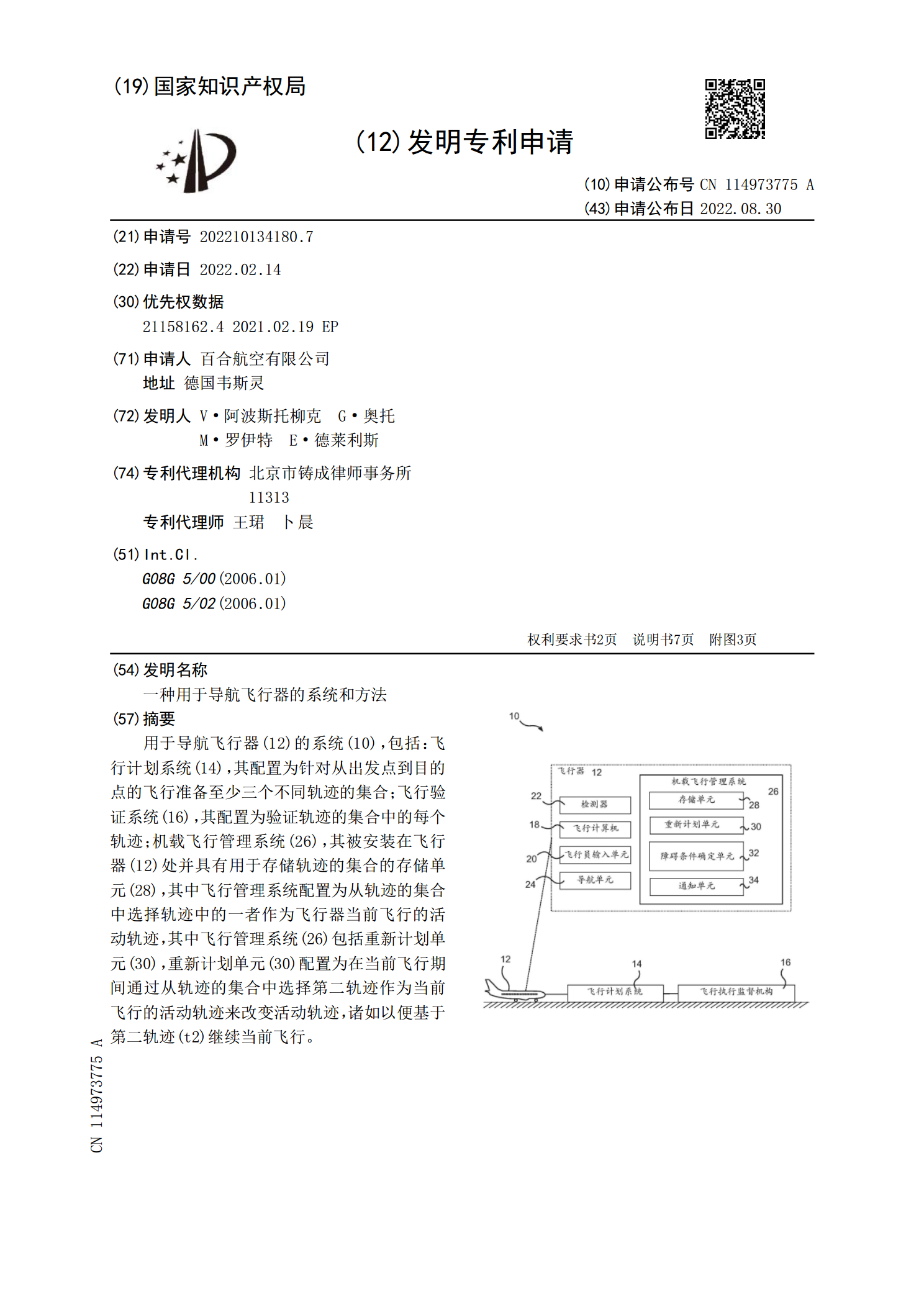
用于导航飞行器(12)的系统(10),包括:飞行计划系统(14),其配置为针对从出发点到目的点的飞行准备至少三个不同轨迹的集合;飞行验证系统(16),其配置为验证轨迹的集合中的每个轨迹;机载飞行管理系统(26),其被安装在飞行器(12)处并具有用于存储轨迹的集合的存储单元(28),其中飞行管理系统配置为从轨迹的集合中选择轨迹中的一者作为飞行器当前飞行的活动轨迹,其中飞行管理系统(26)包括重新计划单元(30),重新计划单元(30)配置为在当前飞行期间通过从轨迹的集合中选择第二轨迹作为当前飞行的活动轨迹来改
用于识别飞行器中的故障的系统和方法.pdf
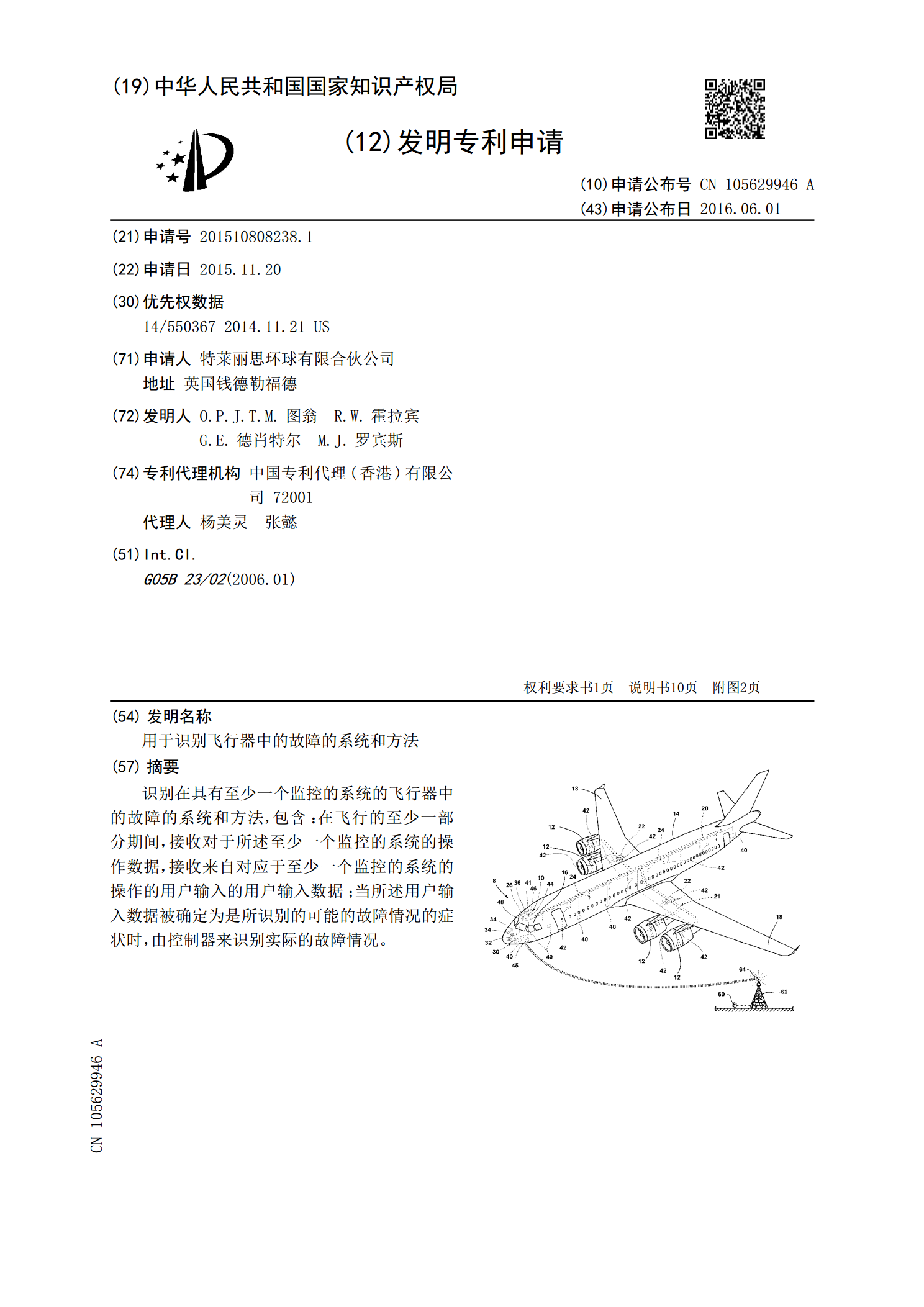
识别在具有至少一个监控的系统的飞行器中的故障的系统和方法,包含:在飞行的至少一部分期间,接收对于所述至少一个监控的系统的操作数据,接收来自对应于至少一个监控的系统的操作的用户输入的用户输入数据;当所述用户输入数据被确定为是所识别的可能的故障情况的症状时,由控制器来识别实际的故障情况。

用于监测在飞行器的环境中的对象的方法和系统.pdf
本发明涉及一种用于监测位于停留在地面(2)上的飞行器(10)的环境中的对象(20)的方法,具有以下步骤:在布置在对象(20)、尤其是陆用运载工具上的通信装置与至少一个在空间上指配给停留在地面(2)上的飞行器(10)的通信装置之间传输通信信号,并且基于所传输的通信信号来确定对象(20)的空间方位信息。此外,本发明还涉及一种装置,具有:接口,该接口被设立用于读入基于在通信装置之间传输的通信信号的数据;以及确定单元,该确定单元被设立用于基于读入的数据来确定对象(20)的空间方位信息。此外,本发明涉及一种用于监测