
一种货物搬运机器人.pdf

增梅****主啊


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种货物搬运机器人.pdf
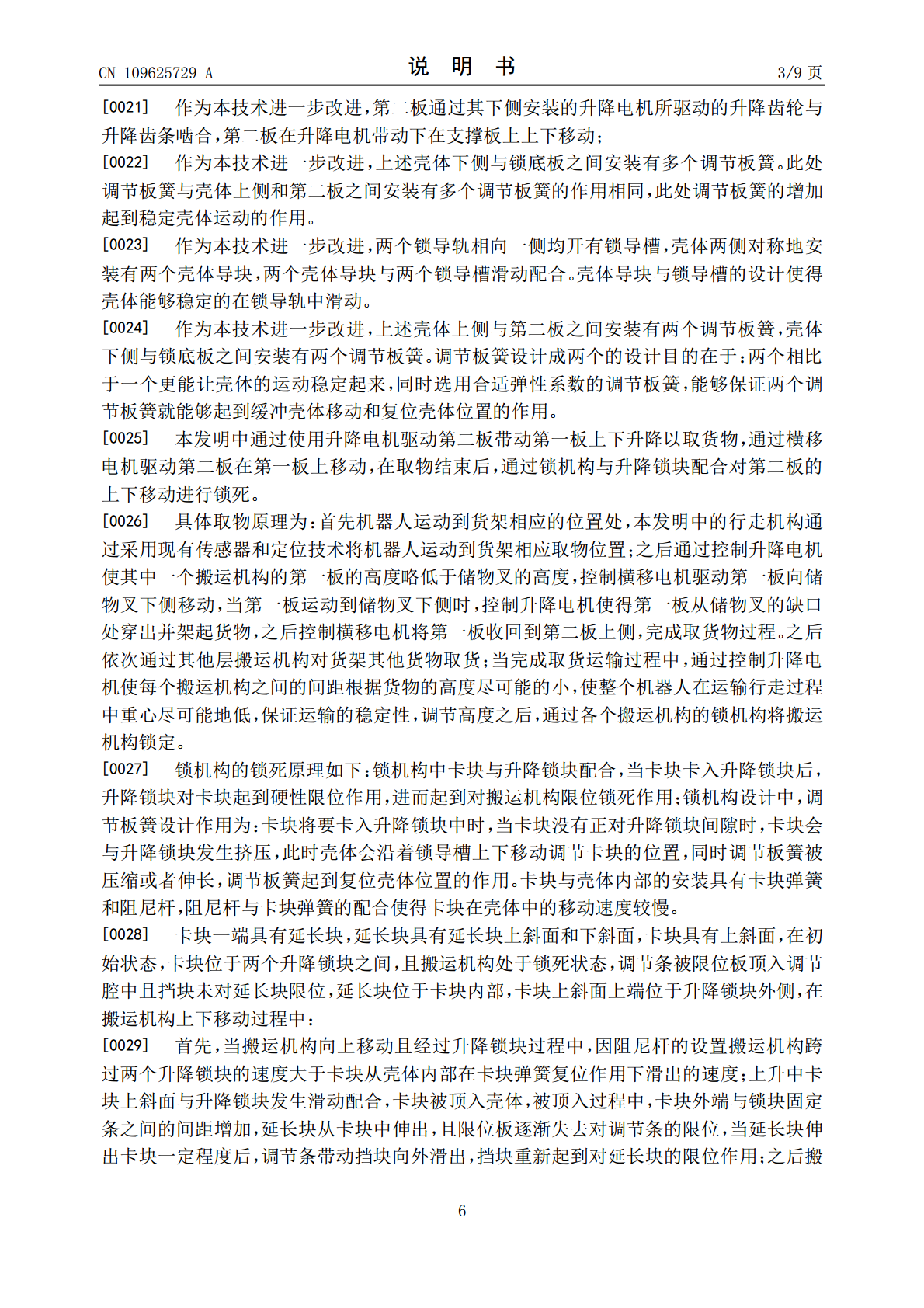
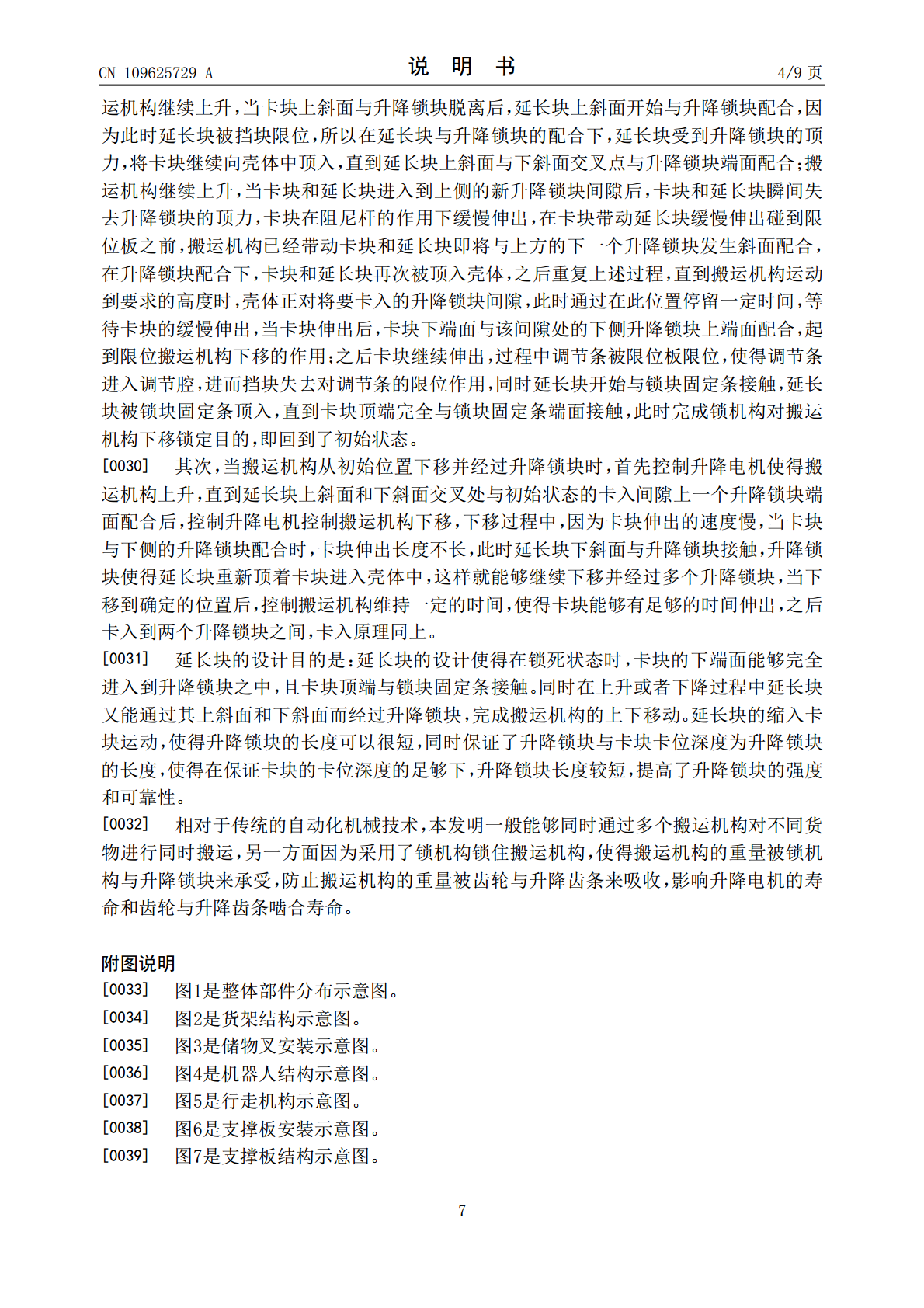
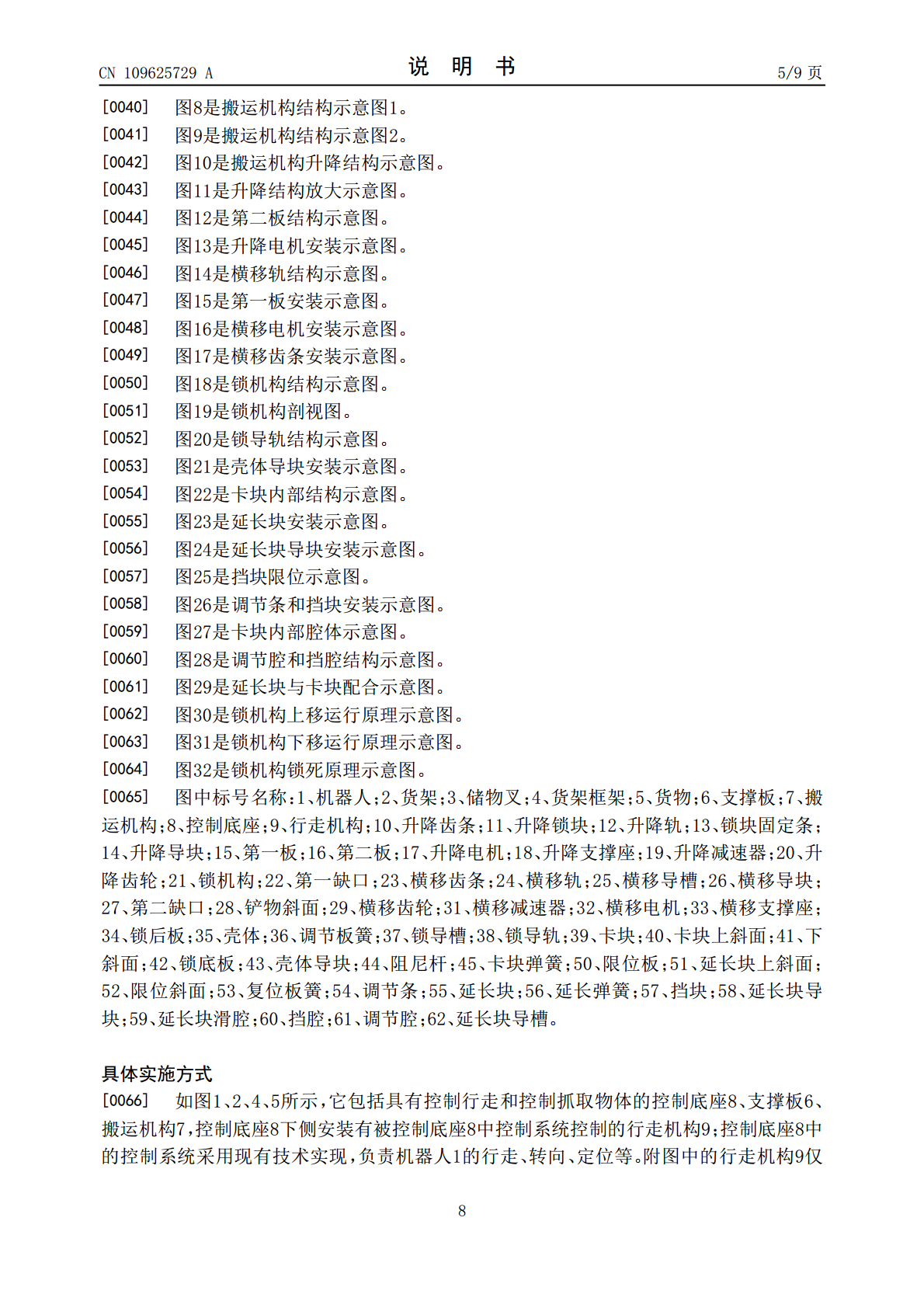
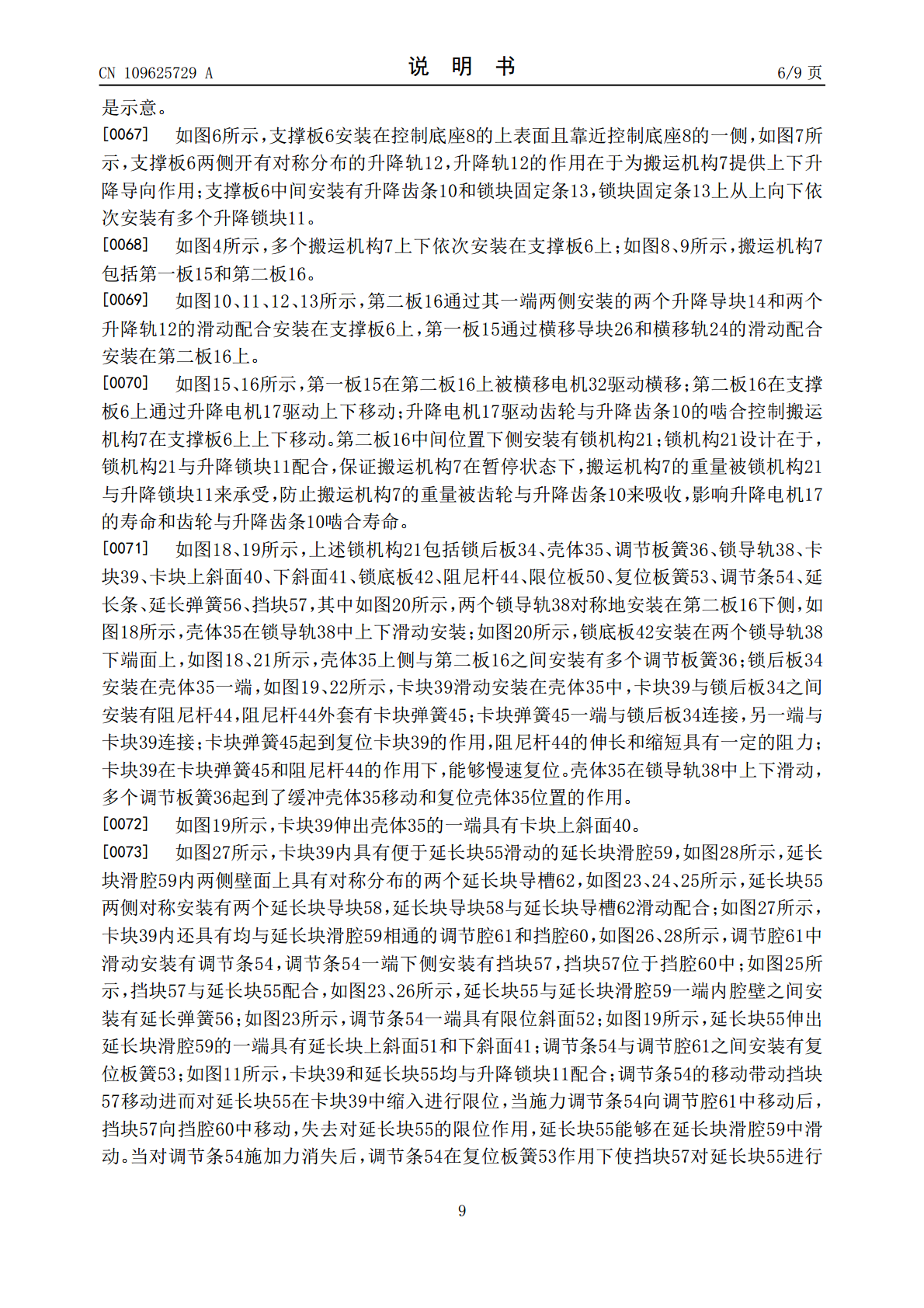
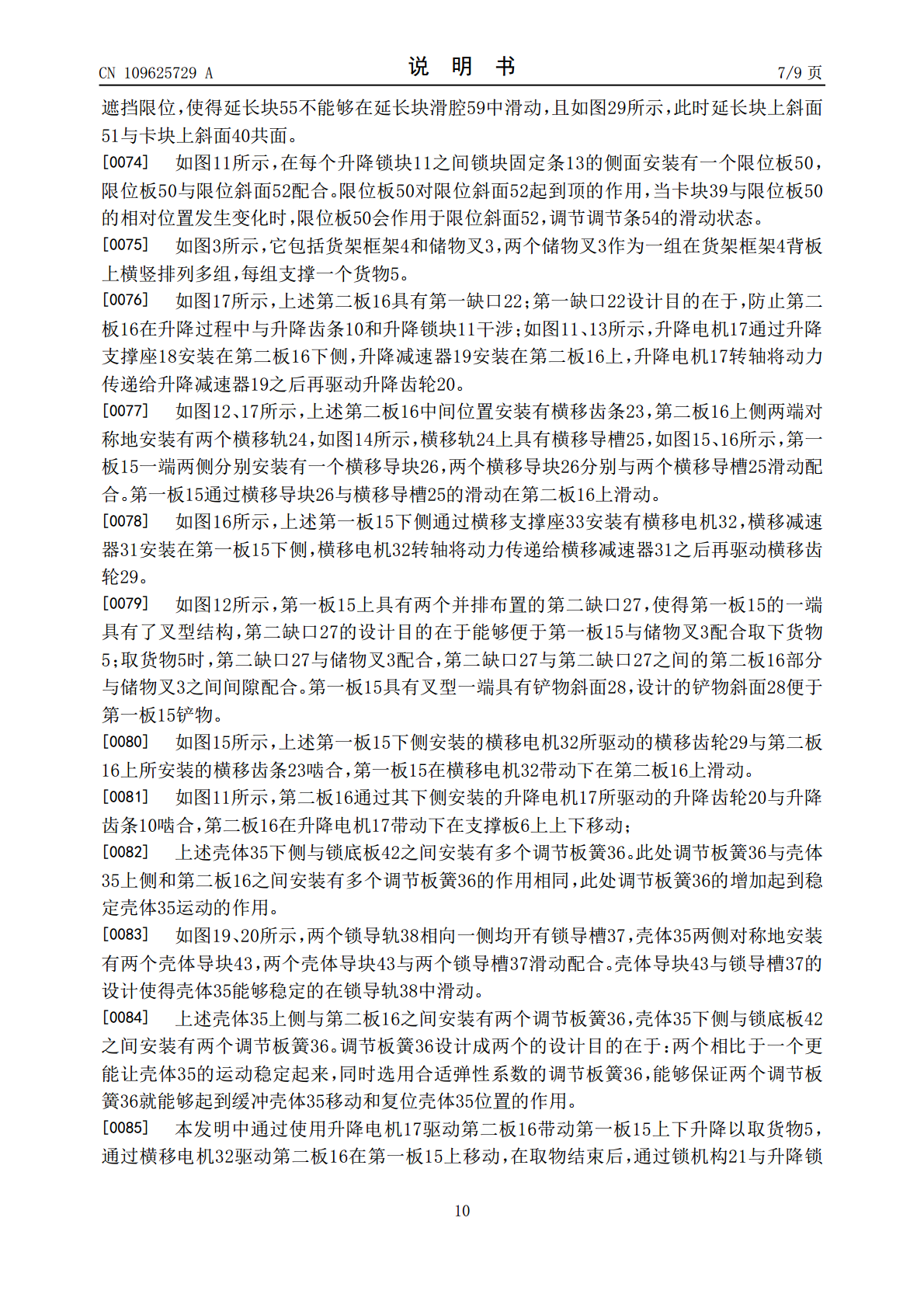
本发明属于自动化机械技术领域,尤其涉及一种货物搬运机器人,它包括具有控制行走和控制抓取物体的控制底座、支撑板、搬运机构,控制底座下侧安装有被控制底座中控制系统控制的行走机构;控制底座中的控制系统采用现有技术实现,负责机器人的行走、转向、定位。多个搬运机构上下依次安装在支撑板上;搬运机构下侧安装有锁机构;搬运机构的重量被锁机构与升降锁块来承受,防止搬运机构的重量被齿轮与升降齿条来吸收,影响升降电机的寿命和齿轮与升降齿条啮合寿命。
一种货物搬运机器人.pdf
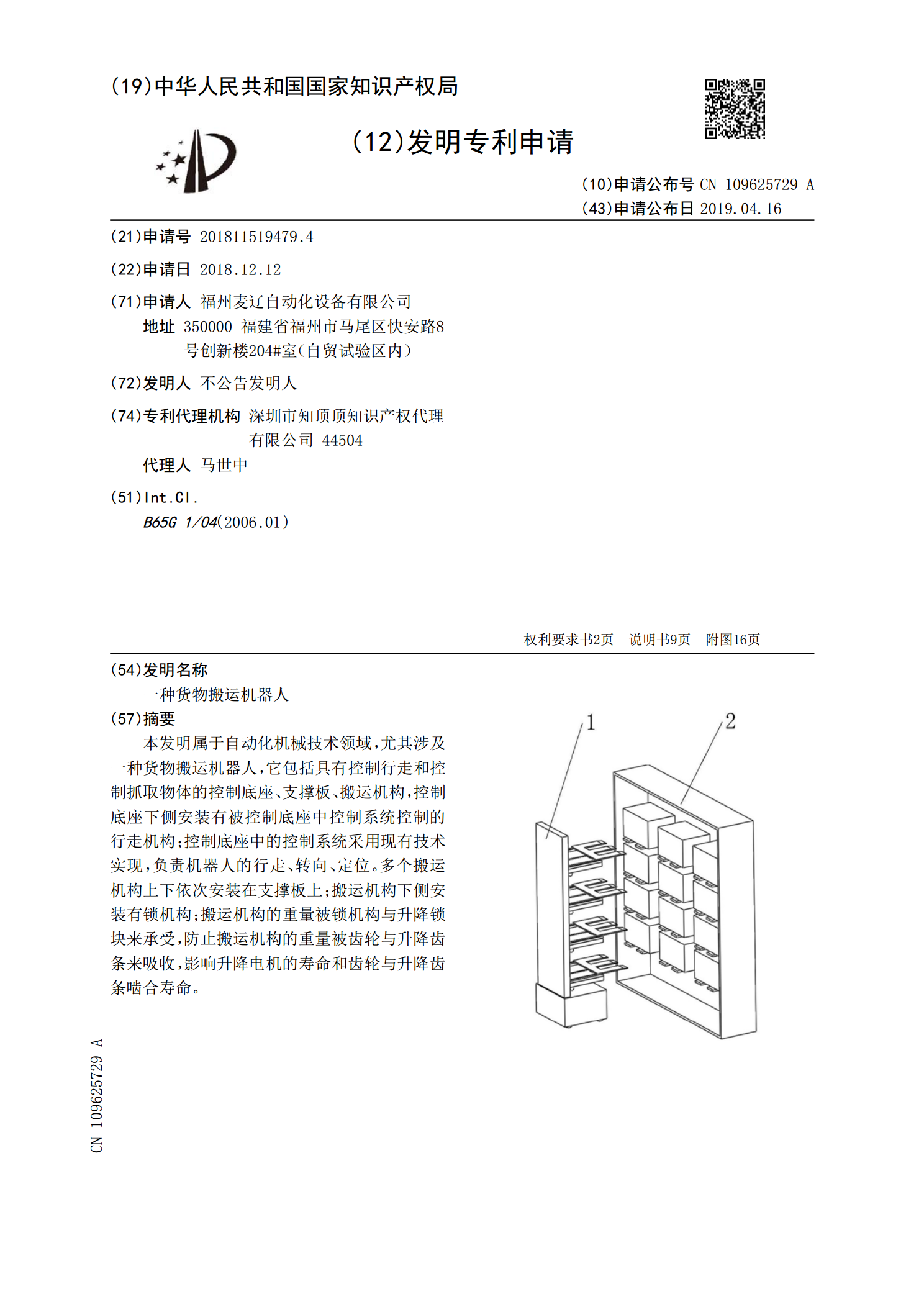
本发明公开了一种货物搬运机器人,包括支架,所述支架底部设有滚轮,所述支架内侧顶面设有卡条,所述卡条外侧设有压力传感器,所述卡条顶部设有放置板,所述放置板内部设有卡槽,所述卡槽外侧设有卡扣装置,所述放置板顶部设有夹板,所述夹板一侧底部设有滑杆,所述夹板内侧设有夹块,所述支架内部设有气缸。本发明通过设有夹板,将重物放置好后,气缸工作通过伸缩杆拉动夹板利用夹块对重物进行紧固,从而避免重物从放置板顶部掉落,然后支架通过滚轮移动时,重物不可避免的会发生晃动的状况,利用夹块减小夹板对重物的挤压损伤,从而保证重物的稳定
一种货物搬运机器人及其搬运方法.pdf
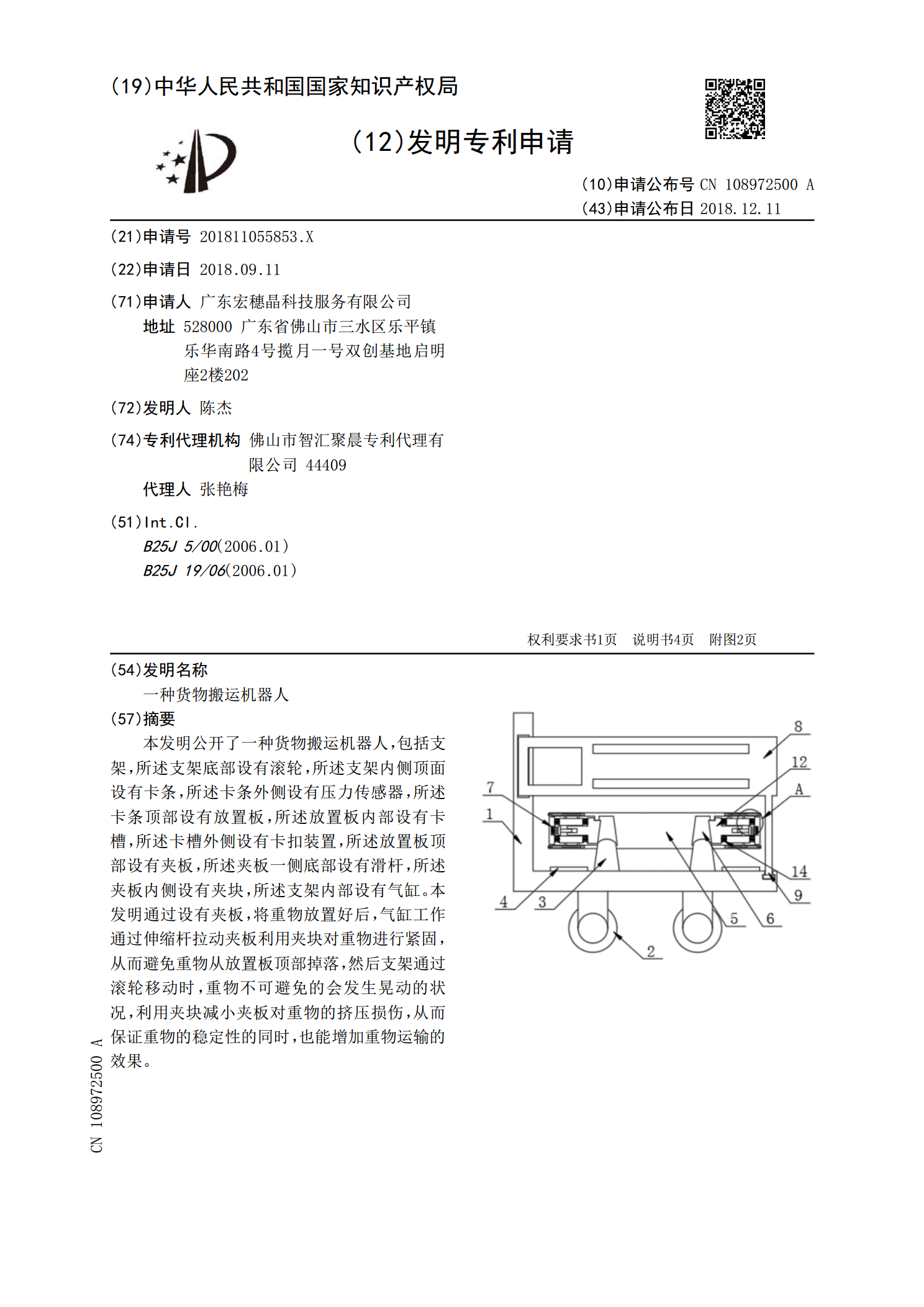
本发明公开了一种货物搬运机器人及其搬运方法,属于搬运设备技术领域,包括货物搬运机器人主体,所述货物搬运机器人主体顶部表面安装有减震机构,所述减震机构由底板、阻尼弹簧和顶板组成,所述减震机构顶部表面安装有托架,所述货物搬运机器人主体外壁四周表面中部均安装有警示机构,所述警示机构由防护盒、蓄电池、LED警示灯、蜂鸣器和开关组成,所述货物搬运机器人主体外壁表面一侧安装有烟雾报警器。本发明通过减震机构,可减缓托架上货物的冲击力对货物搬运机器人主体损坏,进而提高了货物搬运机器人主体的使用安全,并且警示机构和烟雾报警
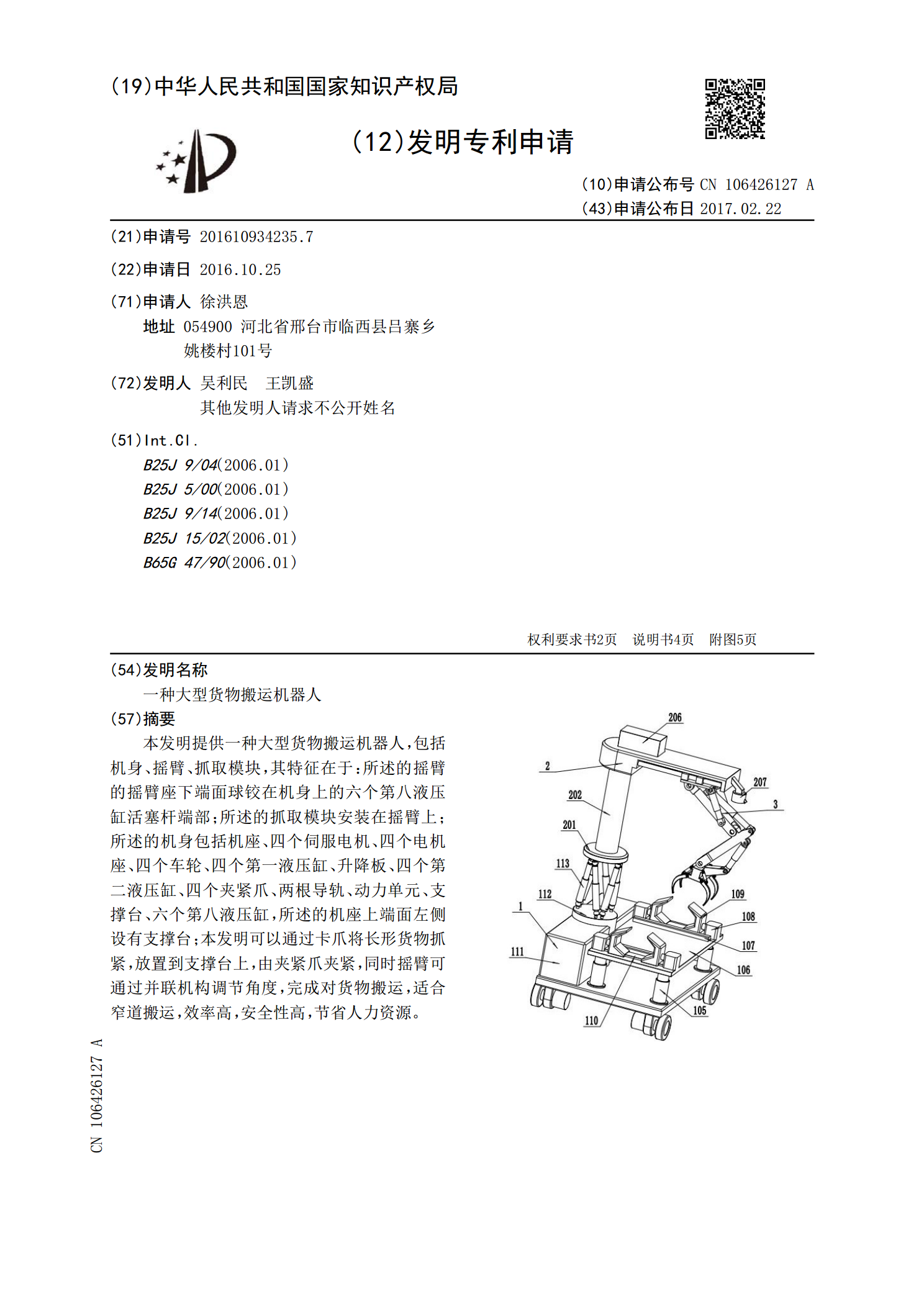
一种大型货物搬运机器人.pdf
本发明提供一种大型货物搬运机器人,包括机身、摇臂、抓取模块,其特征在于:所述的摇臂的摇臂座下端面球铰在机身上的六个第八液压缸活塞杆端部;所述的抓取模块安装在摇臂上;所述的机身包括机座、四个伺服电机、四个电机座、四个车轮、四个第一液压缸、升降板、四个第二液压缸、四个夹紧爪、两根导轨、动力单元、支撑台、六个第八液压缸,所述的机座上端面左侧设有支撑台;本发明可以通过卡爪将长形货物抓紧,放置到支撑台上,由夹紧爪夹紧,同时摇臂可通过并联机构调节角度,完成对货物搬运,适合窄道搬运,效率高,安全性高,节省人力资源。
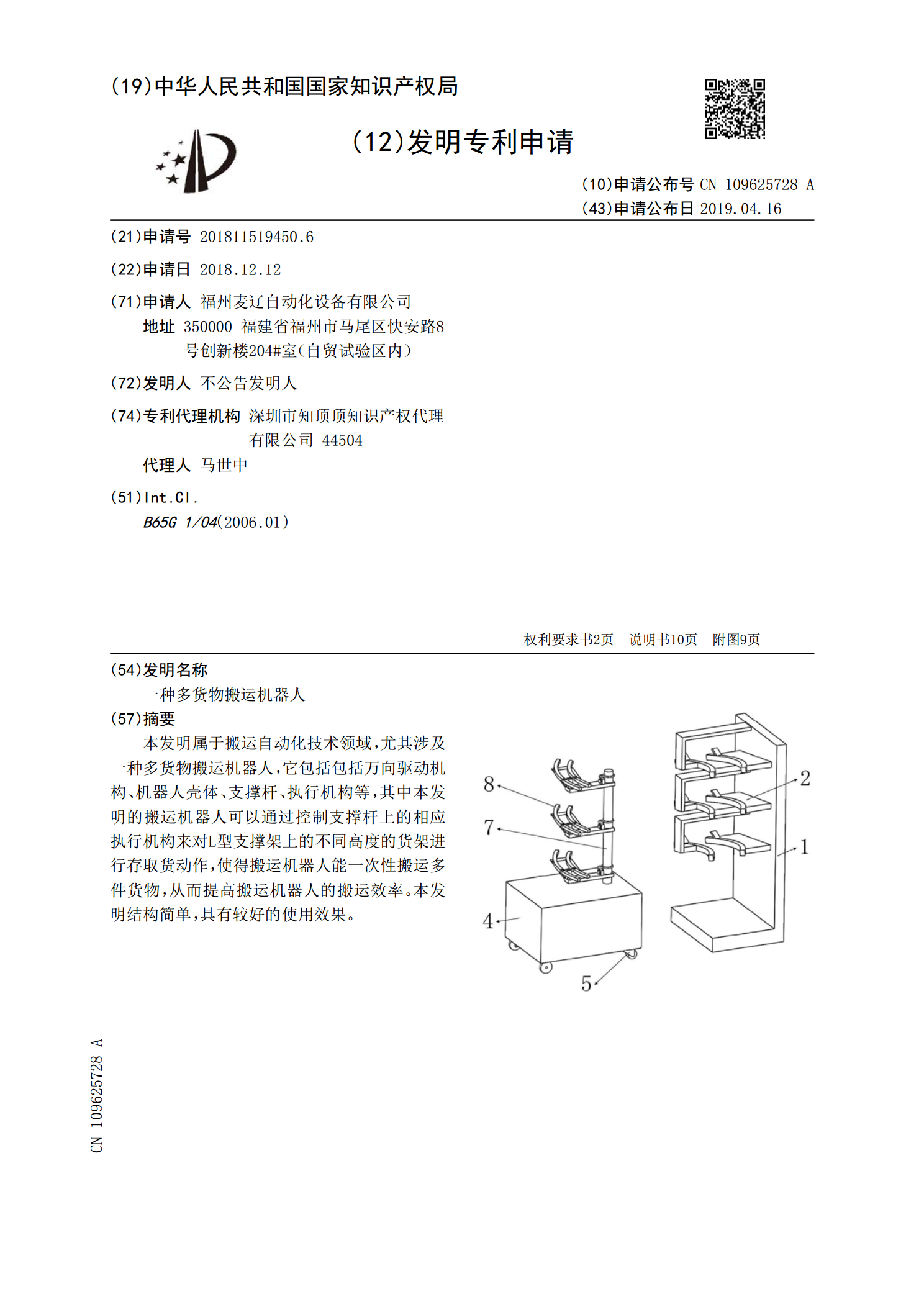
一种多货物搬运机器人.pdf
本发明属于搬运自动化技术领域,尤其涉及一种多货物搬运机器人,它包括包括万向驱动机构、机器人壳体、支撑杆、执行机构等,其中本发明的搬运机器人可以通过控制支撑杆上的相应执行机构来对L型支撑架上的不同高度的货架进行存取货动作,使得搬运机器人能一次性搬运多件货物,从而提高搬运机器人的搬运效率。本发明结构简单,具有较好的使用效果。