
列车轮对尺寸动态检测系统及检测方法.pdf

邻家****曼玉


1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
列车轮对尺寸动态检测系统及检测方法.pdf
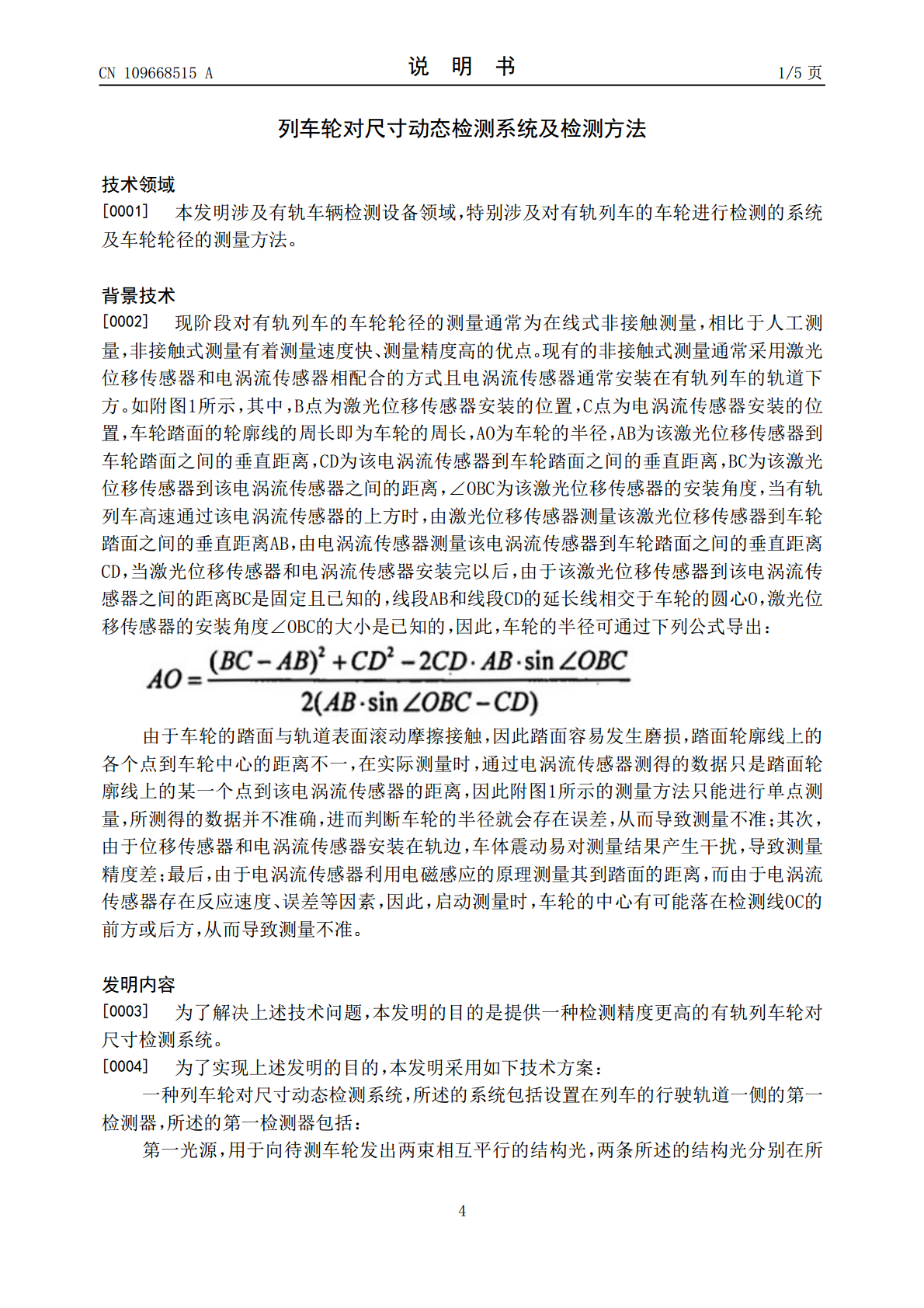
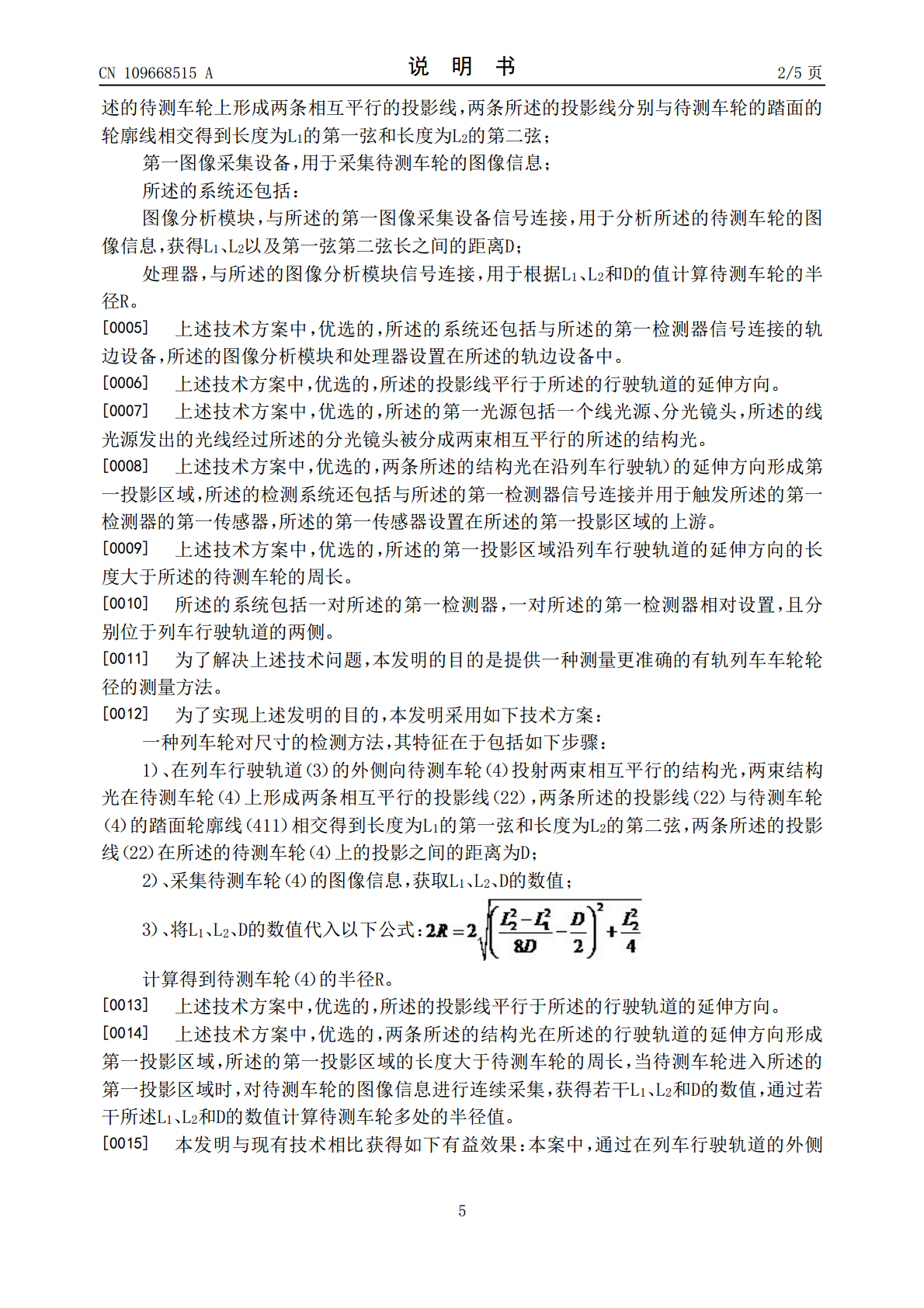
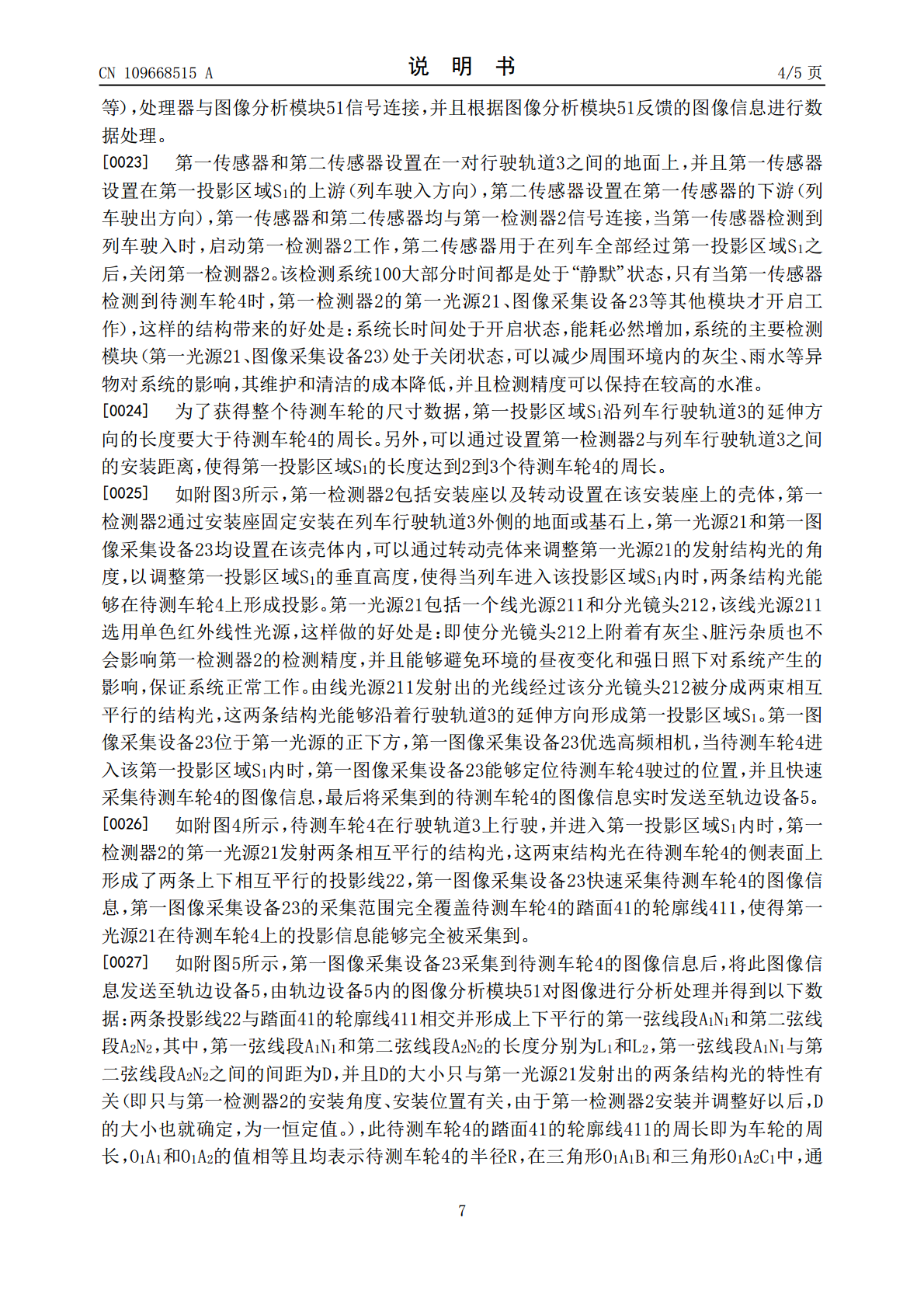
本发明公开一种列车轮对尺寸动态检测系统,包括第一检测器和轨边设备,第一检测器包括:第一光源、第一图像采集设备,轨边设备包括图像分析模块、处理器,本案中,通过在列车行驶轨道的一侧设置线光源,并由该线光源发射出的光束在车轮上形成投影,并得到与车轮的踏面轮廓线相交的两条弦线段,通过数据分析和处理,可测算出车轮的直径,相比于现有技术的非接触测量,本案的系统检测精度更高,测量更加准确。

高速列车轮对动态检测系统.pdf
本申请公开了一种高速列车轮对动态检测系统包括:设置在钢轨上的轨上检测装置,检测列车轮对信息;与轨上检测装置电连接的轨边转接单元,用于转接轨上检测装置检测得到的检测信号;与轨边转接单元电连接的数据处理单元,对轨边转接单元提供的检测信号进行处理得到轮对的检测结果。本发明实施例提供的高速列车轮对动态检测系统的核心检测部件为轨上检测装置,其安装在钢轨的底部,无需对钢轨进行破坏性改造,同时,轨上检测装置能够在列车高速运行时获取得到列车的相关信息,且其内部相关器件抗震性好,能够适应高速运行环境。该系统检测过程全自动进
一种列车轮对尺寸在线检测方法及其系统.pdf
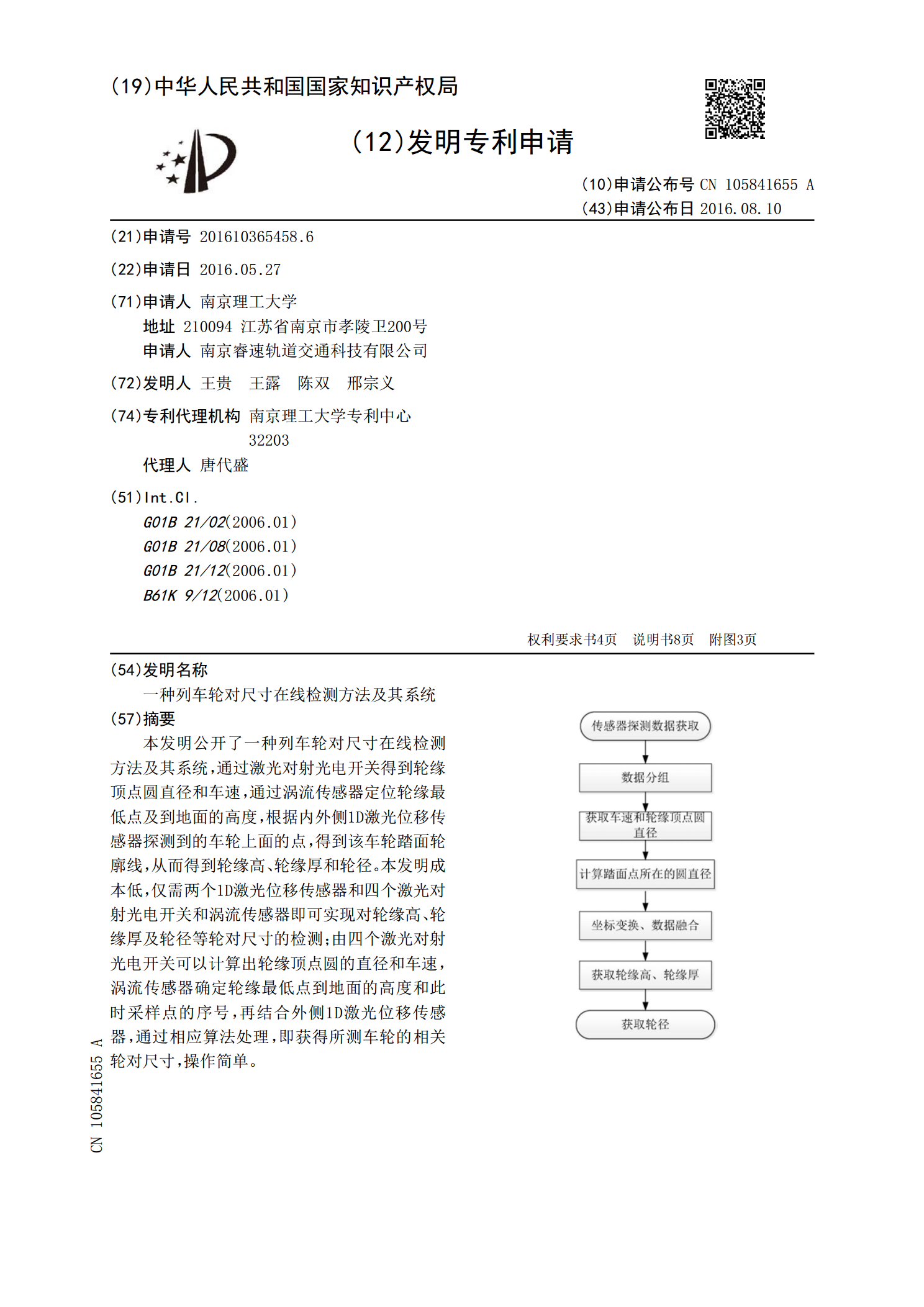
本发明公开了一种列车轮对尺寸在线检测方法及其系统,通过激光对射光电开关得到轮缘顶点圆直径和车速,通过涡流传感器定位轮缘最低点及到地面的高度,根据内外侧1D激光位移传感器探测到的车轮上面的点,得到该车轮踏面轮廓线,从而得到轮缘高、轮缘厚和轮径。本发明成本低,仅需两个1D激光位移传感器和四个激光对射光电开关和涡流传感器即可实现对轮缘高、轮缘厚及轮径等轮对尺寸的检测;由四个激光对射光电开关可以计算出轮缘顶点圆的直径和车速,涡流传感器确定轮缘最低点到地面的高度和此时采样点的序号,再结合外侧1D激光位移传感器,通过
轮对动态检测系统和方法.pdf
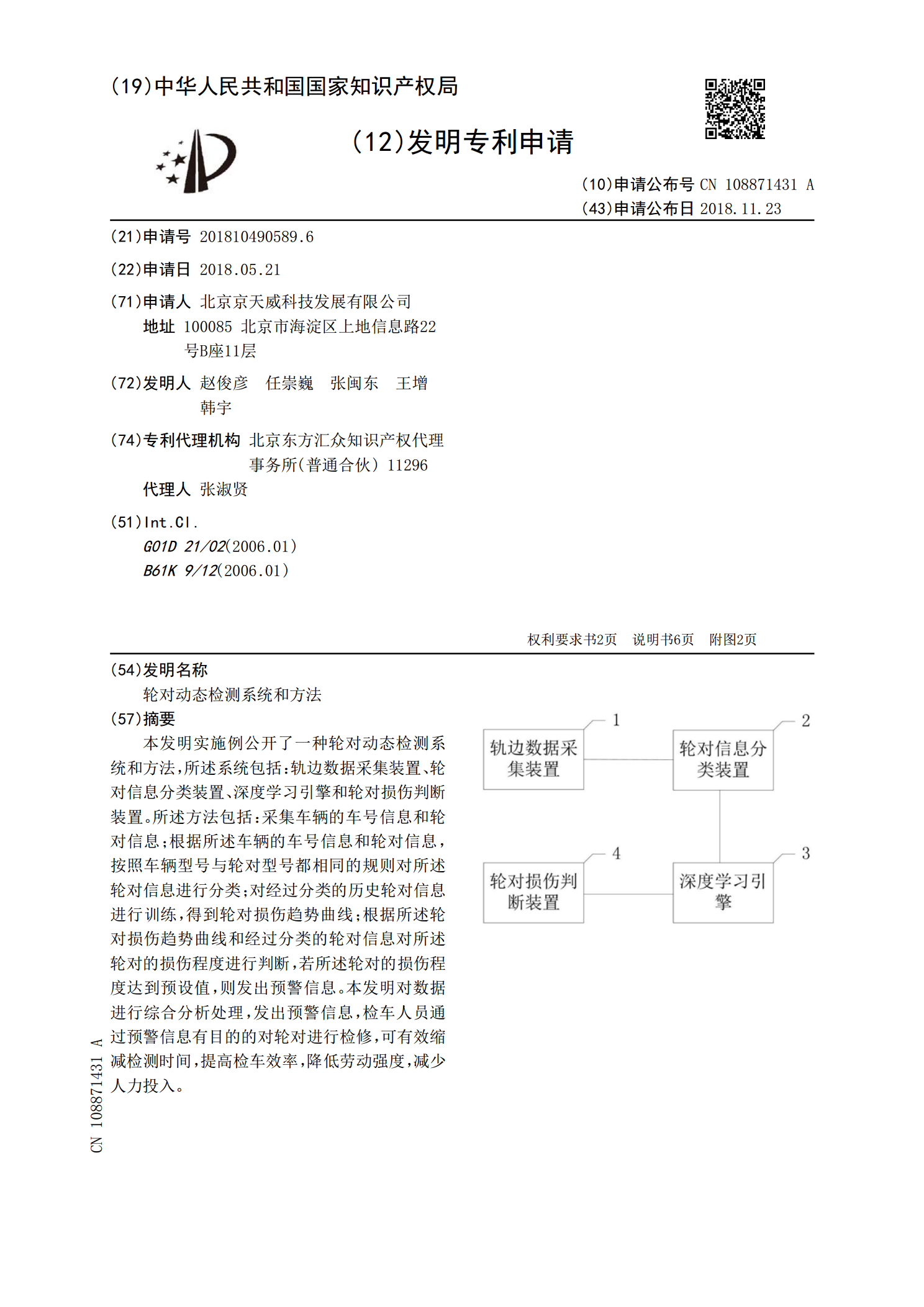
本发明实施例公开了一种轮对动态检测系统和方法,所述系统包括:轨边数据采集装置、轮对信息分类装置、深度学习引擎和轮对损伤判断装置。所述方法包括:采集车辆的车号信息和轮对信息;根据所述车辆的车号信息和轮对信息,按照车辆型号与轮对型号都相同的规则对所述轮对信息进行分类;对经过分类的历史轮对信息进行训练,得到轮对损伤趋势曲线;根据所述轮对损伤趋势曲线和经过分类的轮对信息对所述轮对的损伤程度进行判断,若所述轮对的损伤程度达到预设值,则发出预警信息。本发明对数据进行综合分析处理,发出预警信息,检车人员通过预警信息有目

一种铁路车辆轮对尺寸动态检测系统.pdf
一种铁路车辆轮对尺寸动态检测系统,涉及一种铁路车辆轮对尺寸检测技术,为了解决现有的检测方法由于多条光线会对采集设备造成干扰,影响测量精度的问题。本发明的一条钢轨的两侧设有四个相机,每侧两个;四个光源分别用于作为四个相机的补偿光源;钢轨内侧与外侧光源的波长不同;车轮传感器获取轮对位置信息,控制四个光源以及四个相机同时工作,一号相机和二号相机拍摄车辆轮对前方的踏面图像,三号相机和四号相机拍摄车辆轮对后方的踏面图像;车辆轮对前方的踏面图像以及车辆轮对后方的踏面图像分别通过计算机进行处理,进而获取车辆轮对的尺寸数