
一种基于单目视觉的鞋底喷胶设备及方法.pdf

是你****馨呀

1/10

2/10

3/10
4/10

5/10

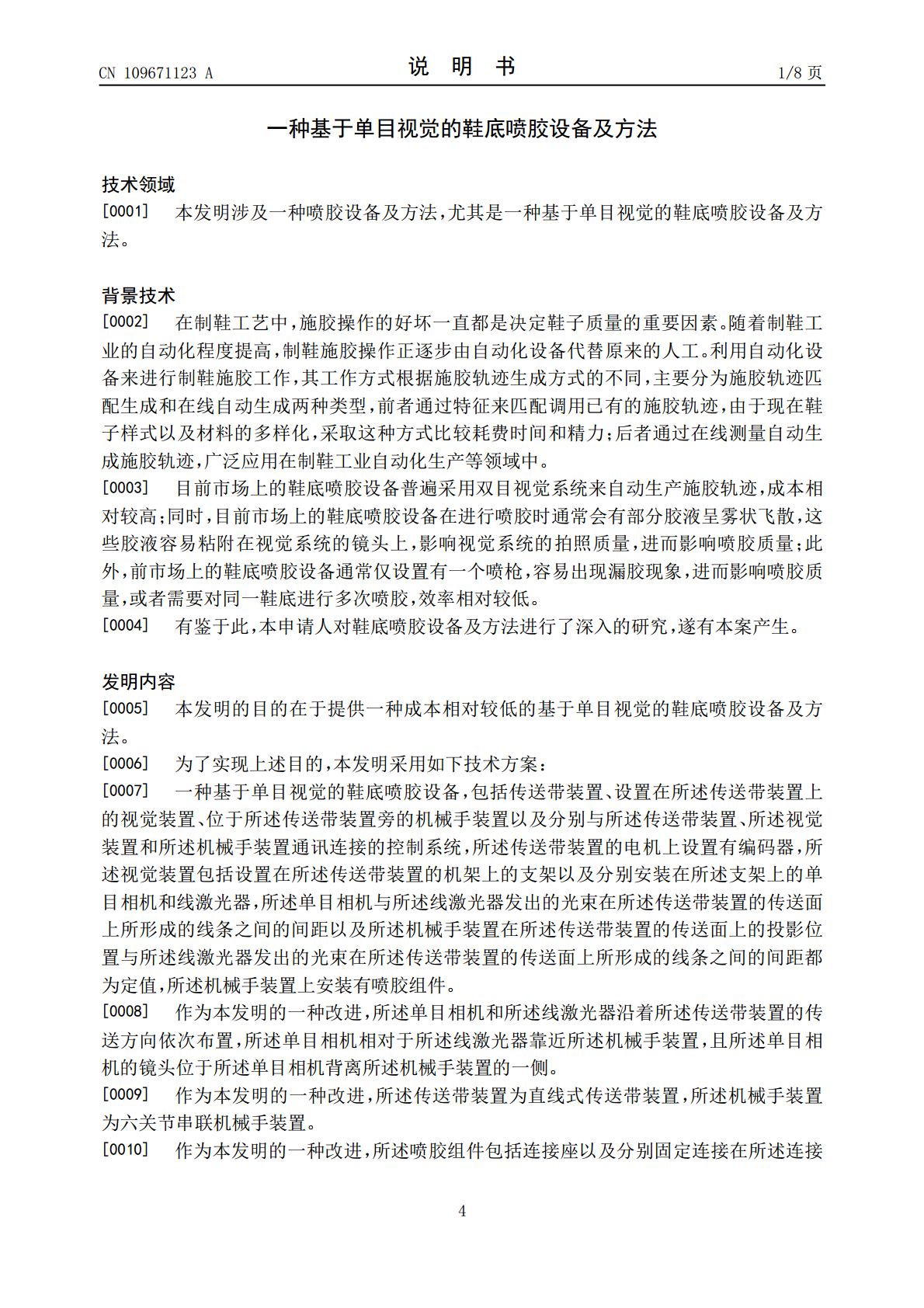
6/10

7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于单目视觉的鞋底喷胶设备及方法.pdf
本发明提供一种基于单目视觉的鞋底喷胶设备,包括传送带装置、视觉装置、机械手装置以及控制系统;本发明还提供一种基于单目视觉的鞋底喷胶方法,包括以下设备调试、获取图像、图像处理、获取测量坐标、提取轨迹点位、坐标变换和喷胶动作等步骤;本发明的设备及方法采用单目相机代替现有的双面视觉系统,成本相对较低,且结合了三维视觉测量检测速度快和机器人喷胶效率高、通用性强的优点,对任意鞋码尺寸、鞋形轮廓,都可以快速完成施胶工作,其施胶质量符合制鞋工艺的要求,节省了人工,降低了工人劳动强度及化学粘接剂对人体可能产生的损害。

一种基于姿态控制的鞋底喷胶路径的规划方法.pdf
本发明一种基于姿态控制的鞋底喷胶路径的规划方法,主要包括机器人、激光轮廓测量仪、胶枪及工控机,通过激光轮廓测量仪扫描鞋底,得到鞋底曲面的三维点云,数据处理后进行喷胶路径规划,在工控机上生成控制程序导入机器人,根据不同的鞋型控制机器人末端胶枪的姿态,完成鞋底的喷胶工序,能够使胶枪姿态跟随鞋底轮廓拟合曲线的斜率进行变化,可以根据不同的鞋型控制机器人的末端胶枪姿态,且由于本发明的喷胶路径经过平滑处理,能够减少机器人电机换向的次数,提高机器人的运行速度,从而提高喷胶效率,并延长机器人的工作寿命。
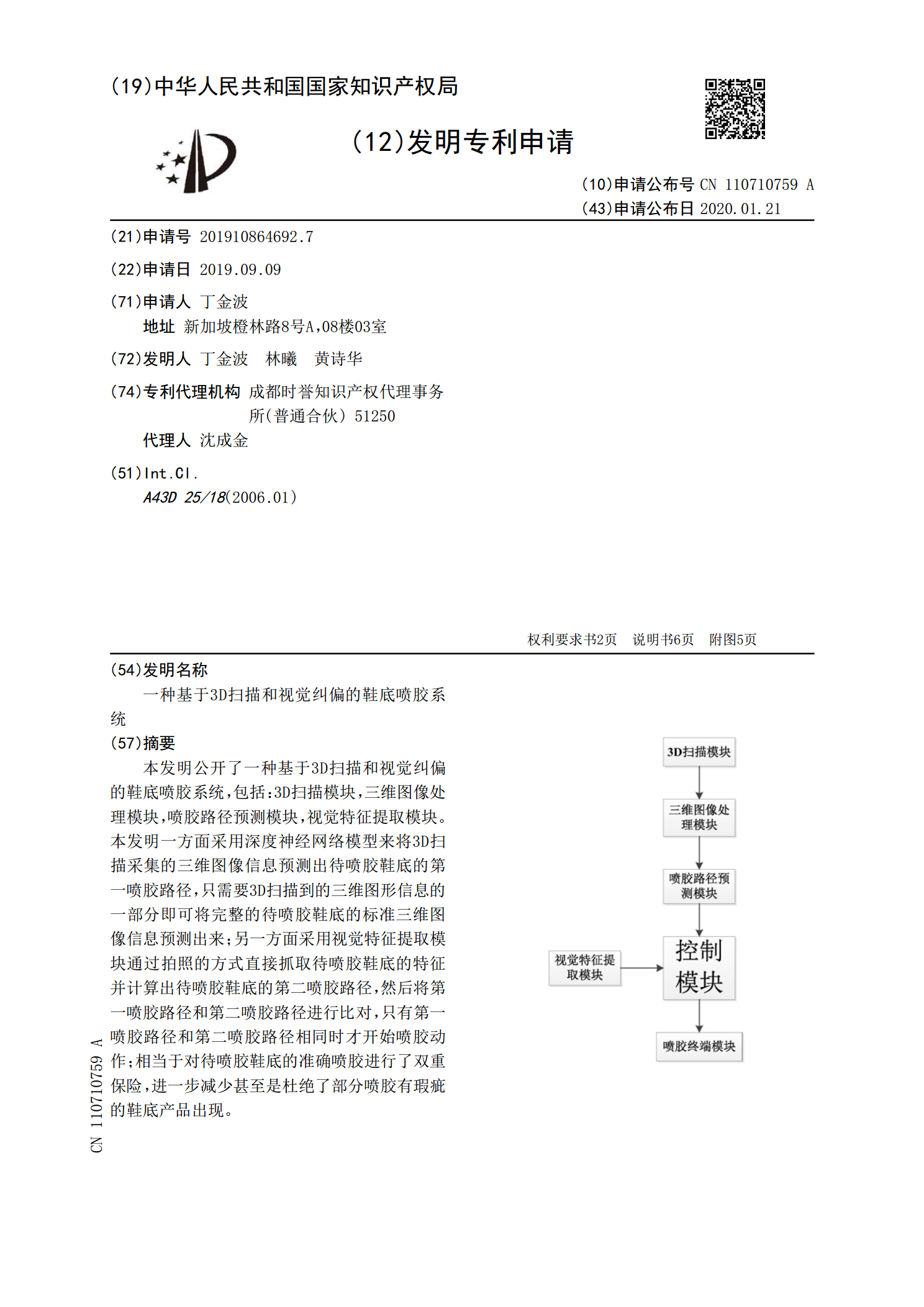
一种基于3D扫描和视觉纠偏的鞋底喷胶系统.pdf
本发明公开了一种基于3D扫描和视觉纠偏的鞋底喷胶系统,包括:3D扫描模块,三维图像处理模块,喷胶路径预测模块,视觉特征提取模块。本发明一方面采用深度神经网络模型来将3D扫描采集的三维图像信息预测出待喷胶鞋底的第一喷胶路径,只需要3D扫描到的三维图形信息的一部分即可将完整的待喷胶鞋底的标准三维图像信息预测出来;另一方面采用视觉特征提取模块通过拍照的方式直接抓取待喷胶鞋底的特征并计算出待喷胶鞋底的第二喷胶路径,然后将第一喷胶路径和第二喷胶路径进行比对,只有第一喷胶路径和第二喷胶路径相同时才开始喷胶动作;相当于
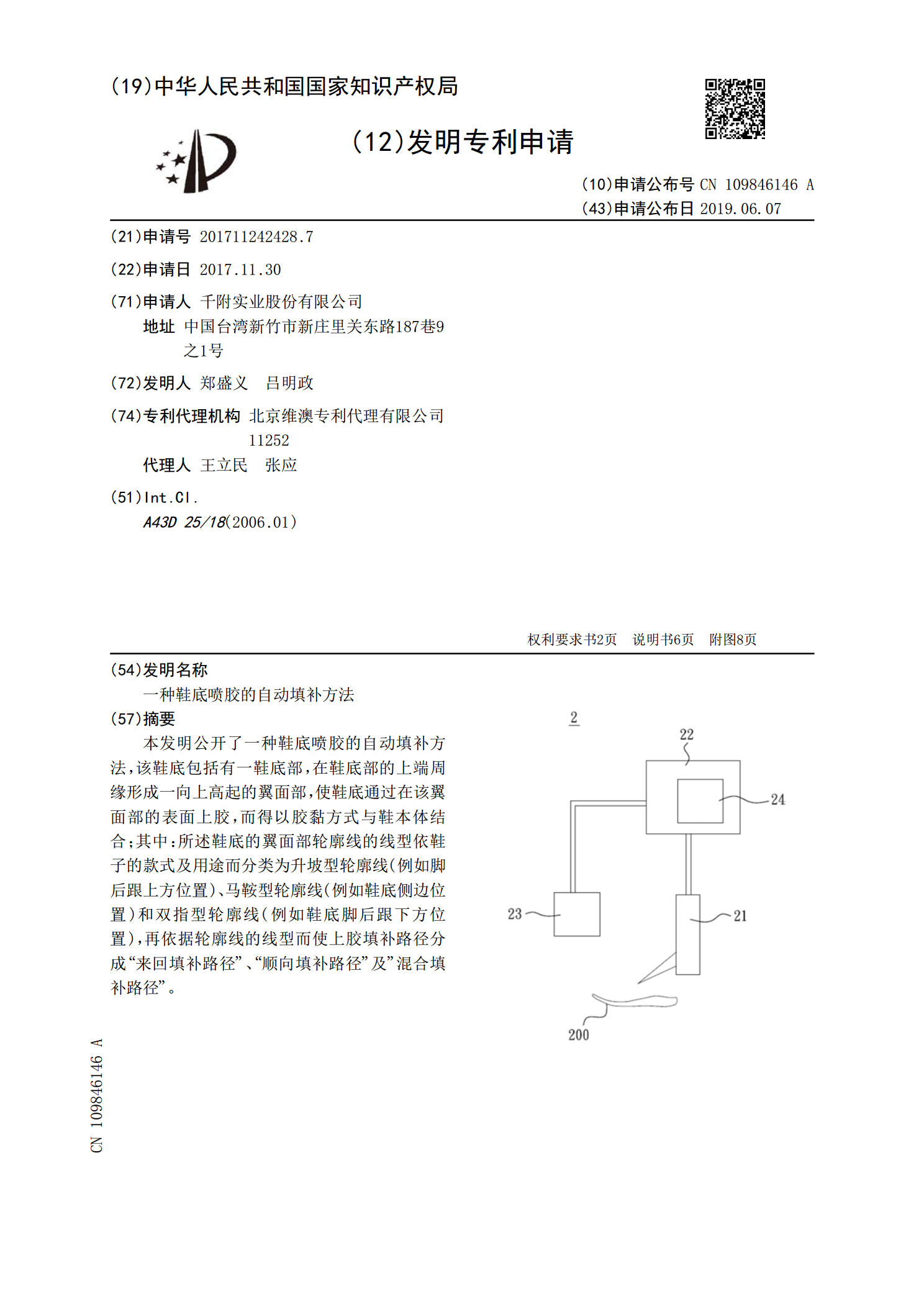
一种鞋底喷胶的自动填补方法.pdf
本发明公开了一种鞋底喷胶的自动填补方法,该鞋底包括有一鞋底部,在鞋底部的上端周缘形成一向上高起的翼面部,使鞋底通过在该翼面部的表面上胶,而得以胶黏方式与鞋本体结合;其中:所述鞋底的翼面部轮廓线的线型依鞋子的款式及用途而分类为升坡型轮廓线(例如脚后跟上方位置)、马鞍型轮廓线(例如鞋底侧边位置)和双指型轮廓线(例如鞋底脚后跟下方位置),再依据轮廓线的线型而使上胶填补路径分成“来回填补路径”、“顺向填补路径”及”混合填补路径”。

一种转盘式鞋底自动喷胶机及其喷胶方法.pdf
本发明公开了一种转盘式鞋底自动喷胶机及其喷胶方法,所述方法包括以下步骤:S1、将待喷胶鞋底放置于取放工位的转盘上;S2、转盘旋转预定角度,使待喷胶鞋底到达等待工位;S3、转盘旋转预定角度,使待喷胶鞋底到达摄像工位;S4、3D扫描摄像装置拍摄待喷胶鞋底,控制装置处理所述拍摄到的图像,获得待喷胶鞋底的三维轮廓,并生成喷胶轨迹;S5、摄像完毕后,转盘旋转预定角度,使待喷胶鞋底到达喷胶工位;S6、控制装置控制协作机器人运动,使喷胶枪按所述喷胶轨迹对待喷胶鞋底进行喷胶;S7、喷胶完毕后,转盘旋转预定角度,使已喷胶鞋