
一种基于3D扫描和视觉纠偏的鞋底喷胶系统.pdf

森林****io

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于3D扫描和视觉纠偏的鞋底喷胶系统.pdf
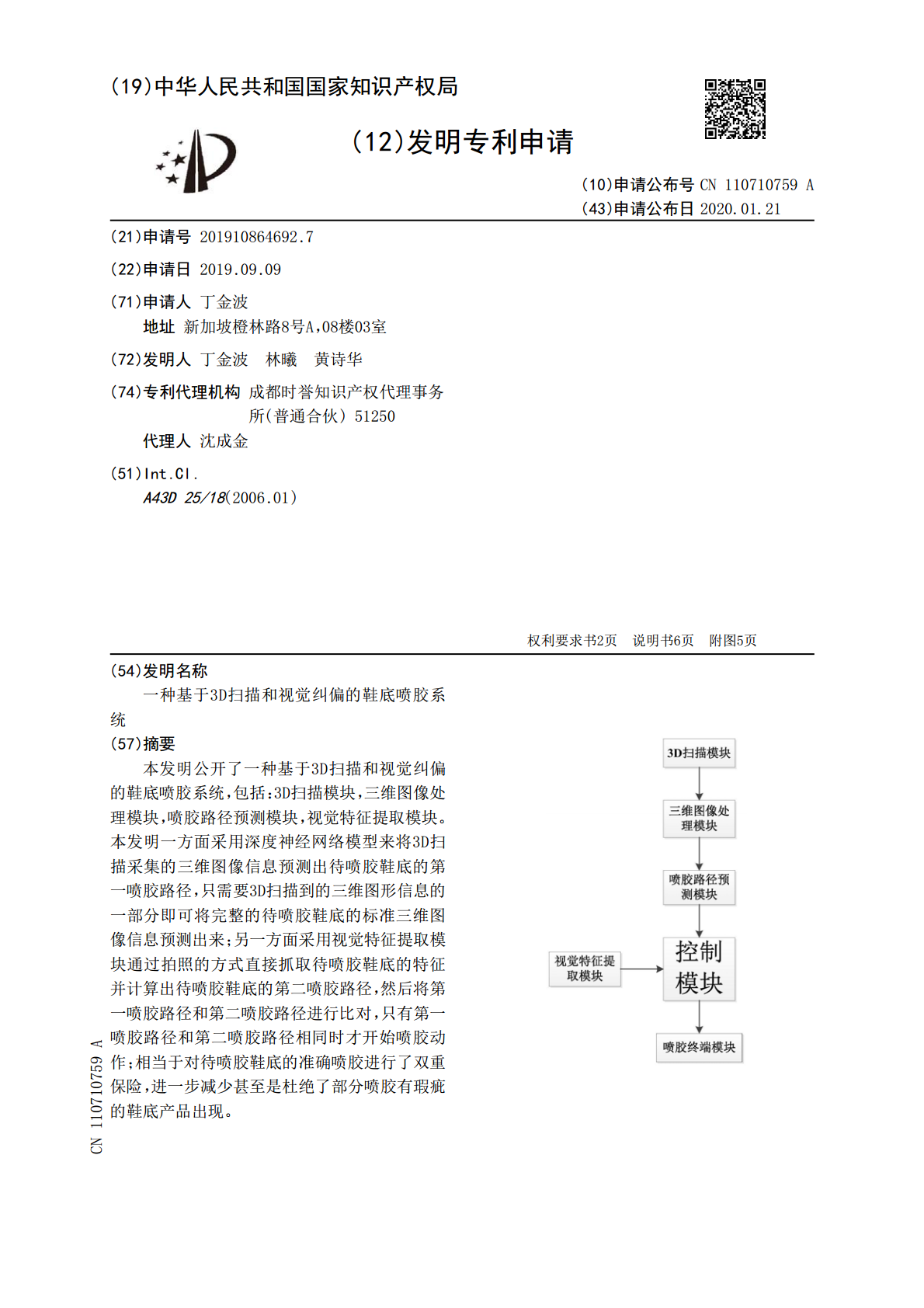
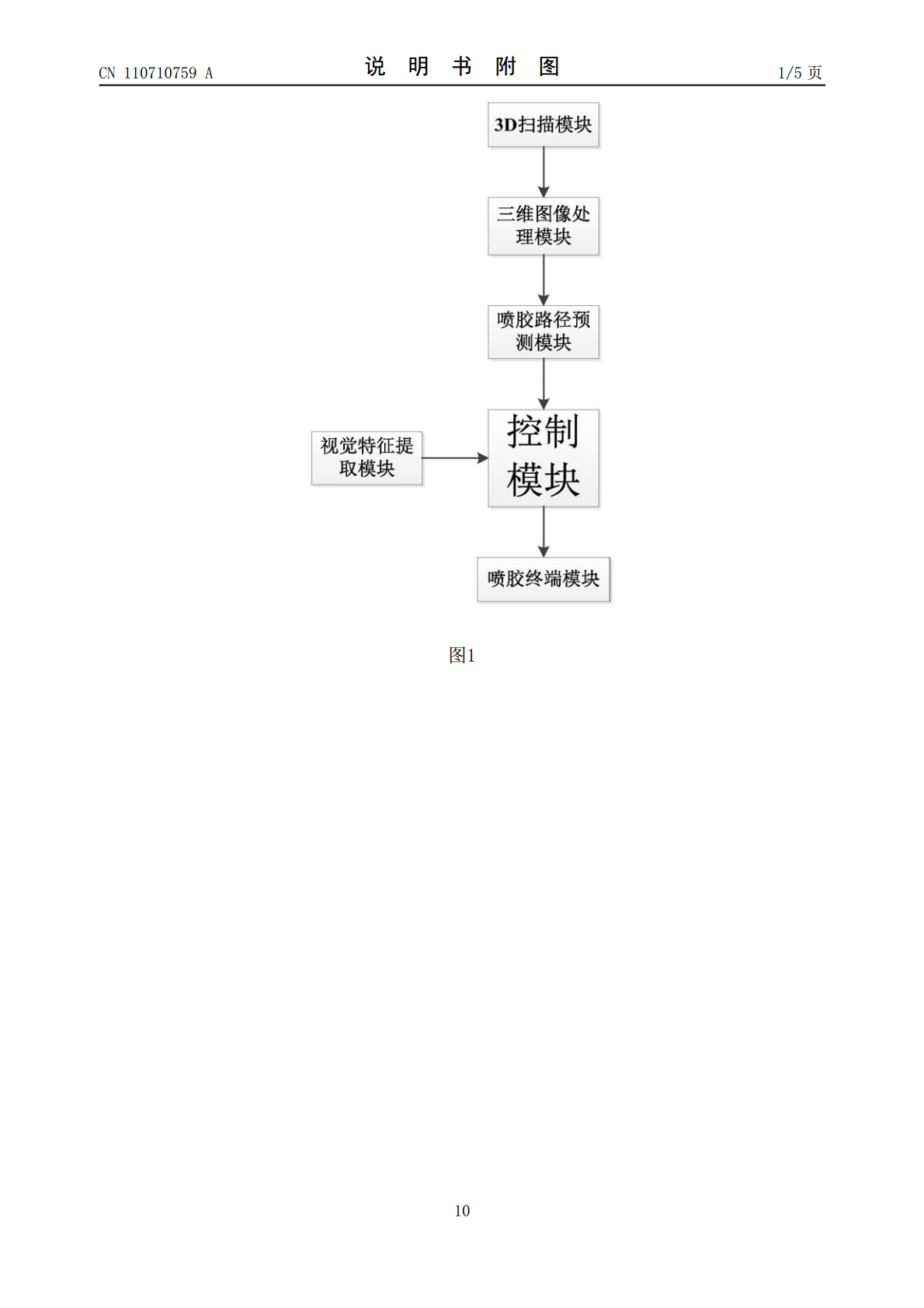
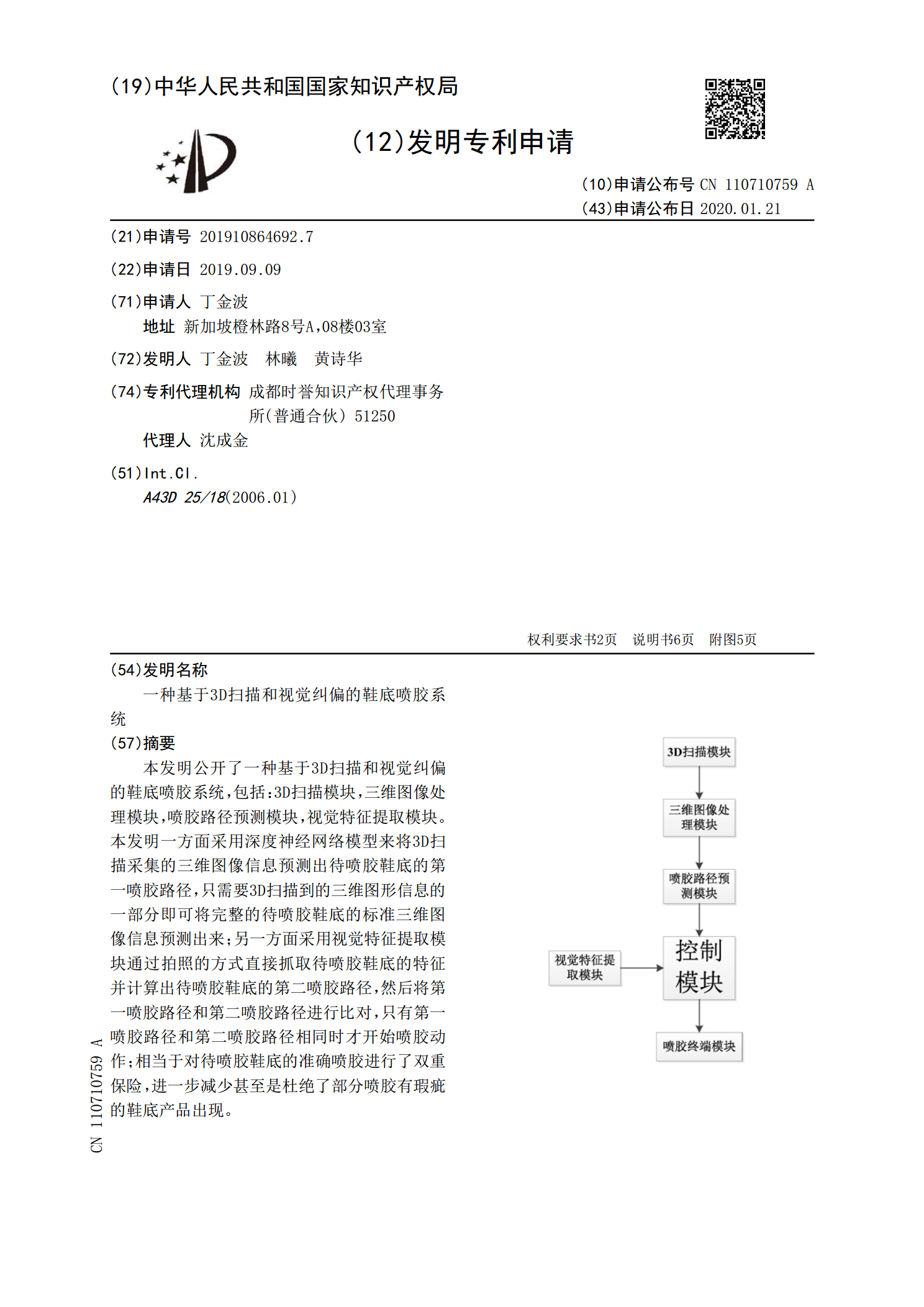
本发明公开了一种基于3D扫描和视觉纠偏的鞋底喷胶系统,包括:3D扫描模块,三维图像处理模块,喷胶路径预测模块,视觉特征提取模块。本发明一方面采用深度神经网络模型来将3D扫描采集的三维图像信息预测出待喷胶鞋底的第一喷胶路径,只需要3D扫描到的三维图形信息的一部分即可将完整的待喷胶鞋底的标准三维图像信息预测出来;另一方面采用视觉特征提取模块通过拍照的方式直接抓取待喷胶鞋底的特征并计算出待喷胶鞋底的第二喷胶路径,然后将第一喷胶路径和第二喷胶路径进行比对,只有第一喷胶路径和第二喷胶路径相同时才开始喷胶动作;相当于

一种基于单目视觉的鞋底喷胶设备及方法.pdf
本发明提供一种基于单目视觉的鞋底喷胶设备,包括传送带装置、视觉装置、机械手装置以及控制系统;本发明还提供一种基于单目视觉的鞋底喷胶方法,包括以下设备调试、获取图像、图像处理、获取测量坐标、提取轨迹点位、坐标变换和喷胶动作等步骤;本发明的设备及方法采用单目相机代替现有的双面视觉系统,成本相对较低,且结合了三维视觉测量检测速度快和机器人喷胶效率高、通用性强的优点,对任意鞋码尺寸、鞋形轮廓,都可以快速完成施胶工作,其施胶质量符合制鞋工艺的要求,节省了人工,降低了工人劳动强度及化学粘接剂对人体可能产生的损害。

一种基于姿态控制的鞋底喷胶路径的规划方法.pdf
本发明一种基于姿态控制的鞋底喷胶路径的规划方法,主要包括机器人、激光轮廓测量仪、胶枪及工控机,通过激光轮廓测量仪扫描鞋底,得到鞋底曲面的三维点云,数据处理后进行喷胶路径规划,在工控机上生成控制程序导入机器人,根据不同的鞋型控制机器人末端胶枪的姿态,完成鞋底的喷胶工序,能够使胶枪姿态跟随鞋底轮廓拟合曲线的斜率进行变化,可以根据不同的鞋型控制机器人的末端胶枪姿态,且由于本发明的喷胶路径经过平滑处理,能够减少机器人电机换向的次数,提高机器人的运行速度,从而提高喷胶效率,并延长机器人的工作寿命。

一种基于3D轮廓的鞋底喷胶轨迹生成方法以及应用该方法的设备.pdf
本发明涉及一种基于3D轮廓的鞋底喷胶轨迹生成方法以及应用该方法的设备,鞋底喷胶设备采用了多喷头结构,通过确定鞋底的3D轮廓得出喷胶喷头的运行参考轨迹,进一步得出不同喷头的喷胶轨迹,而使得不同的喷头能够依照不同的喷胶轨迹去令鞋底喷胶后的状态变得非常标准,有效避免了溢胶、过喷等现象的发生。

用于鞋面、鞋底的快速识别喷胶方法及系统.pdf
本发明公开了提供一种基于机器视觉引导的鞋面、鞋底快速喷胶方法及系统,该方法包括上料、定位、路径识别、喷胶、烘干步骤。该系统包括有控制系统、传送带、视觉系统、喷胶机器人及烤炉。该方法及系统通过视觉系统对鞋面及鞋楦的位置及形状的识别,快速转换为喷胶机器人的工作路径,引导喷胶机器人完成对不同尺寸及形状的鞋面和鞋底的喷胶工作。在喷胶过程中,喷胶机器人无需预先对每个鞋型和尺寸进行耗时的路径校准,使得在同一条生产线上的鞋型和尺寸可以灵活多变,从而适应当前小批量多变化的市场要求,极大的提高生产效率。