
自驱动行李箱及自驱动装置.pdf

涵蓄****09


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共46页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自驱动行李箱及自驱动装置.pdf
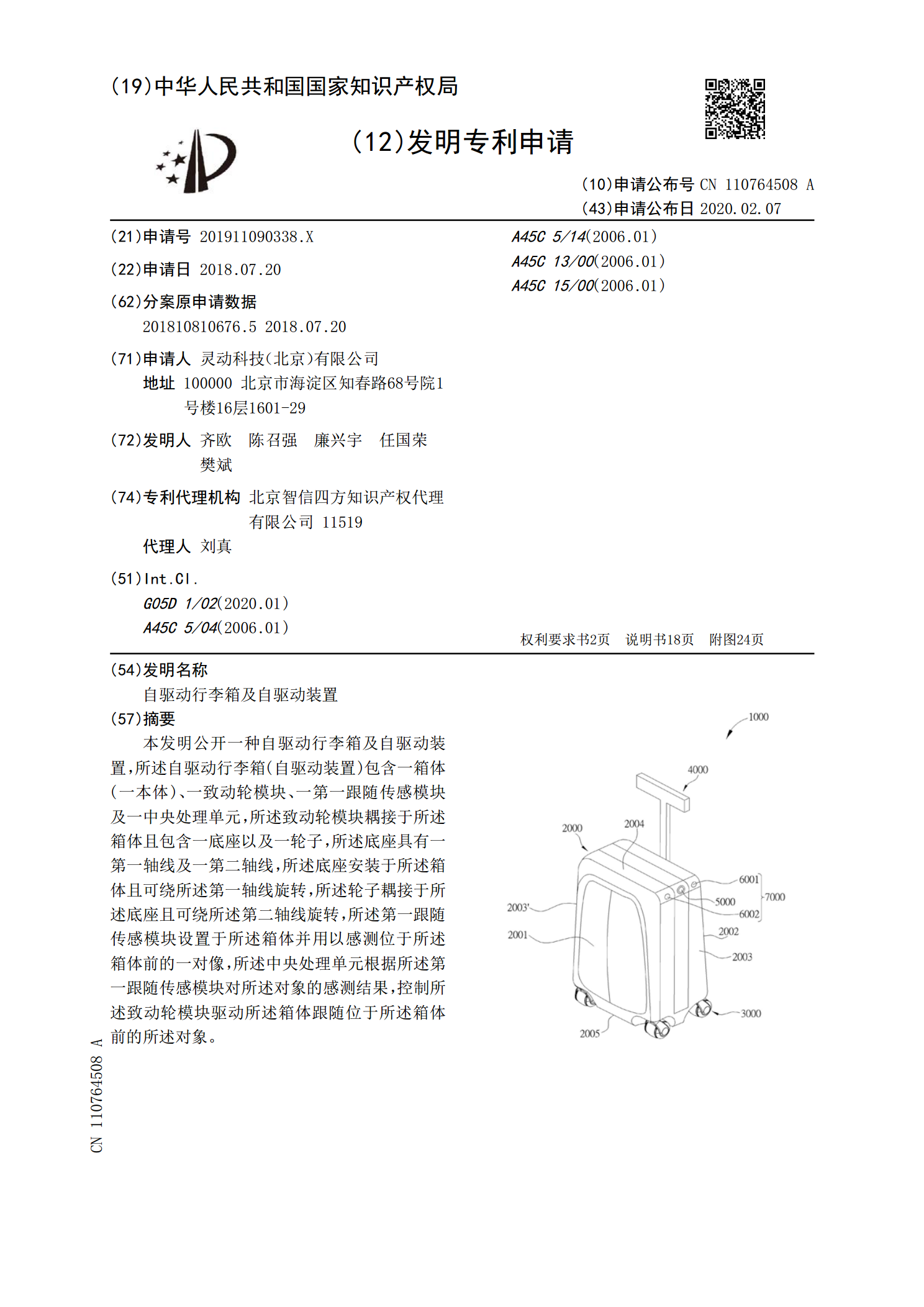
本发明公开一种自驱动行李箱及自驱动装置,所述自驱动行李箱(自驱动装置)包含一箱体(一本体)、一致动轮模块、一第一跟随传感模块及一中央处理单元,所述致动轮模块耦接于所述箱体且包含一底座以及一轮子,所述底座具有一第一轴线及一第二轴线,所述底座安装于所述箱体且可绕所述第一轴线旋转,所述轮子耦接于所述底座且可绕所述第二轴线旋转,所述第一跟随传感模块设置于所述箱体并用以感测位于所述箱体前的一对像,所述中央处理单元根据所述第一跟随传感模块对所述对象的感测结果,控制所述致动轮模块驱动所述箱体跟随位于所述箱体前的所述对象
自驱动行李箱及自驱动装置.pdf
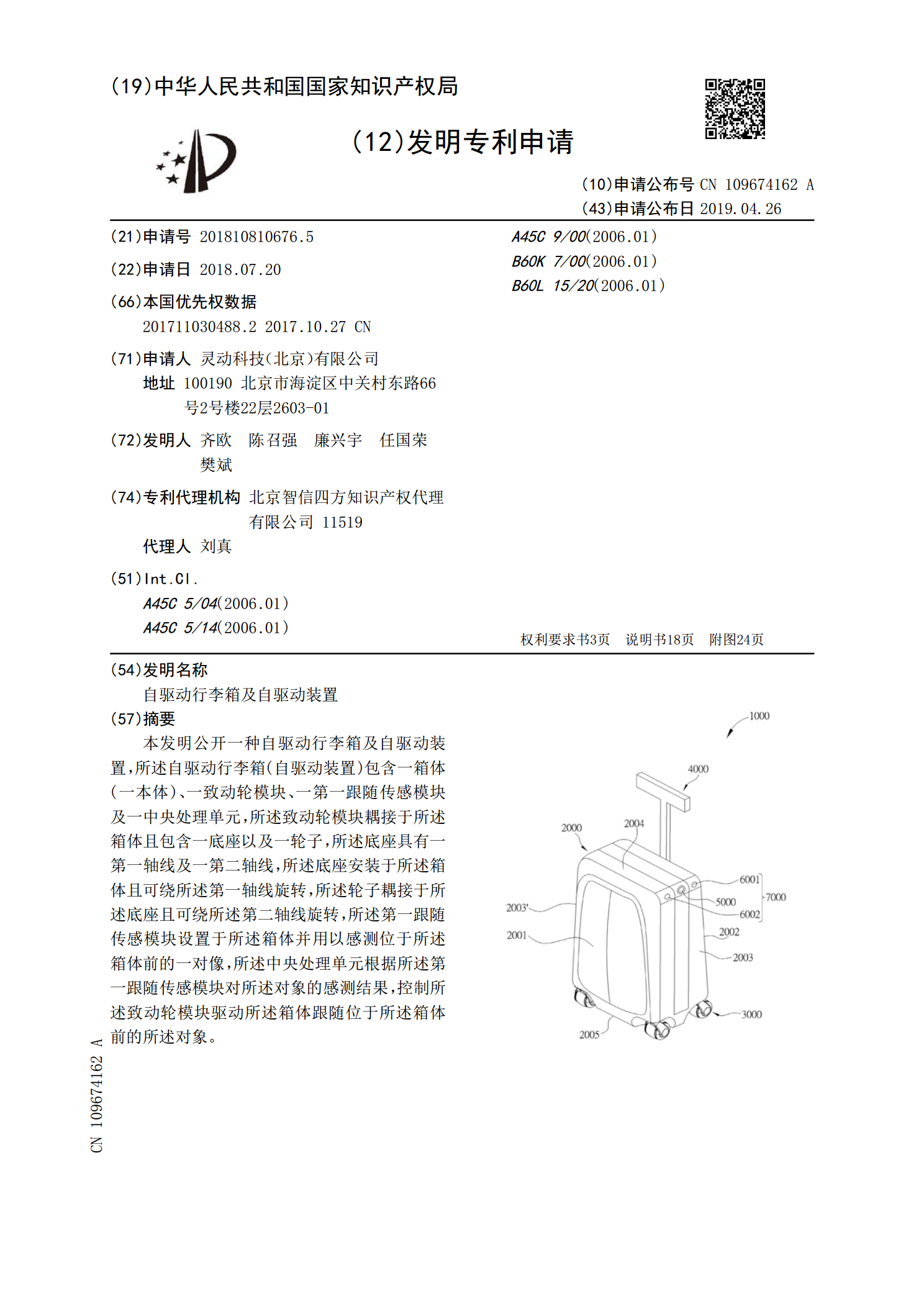
本发明公开一种自驱动行李箱及自驱动装置,所述自驱动行李箱(自驱动装置)包含一箱体(一本体)、一致动轮模块、一第一跟随传感模块及一中央处理单元,所述致动轮模块耦接于所述箱体且包含一底座以及一轮子,所述底座具有一第一轴线及一第二轴线,所述底座安装于所述箱体且可绕所述第一轴线旋转,所述轮子耦接于所述底座且可绕所述第二轴线旋转,所述第一跟随传感模块设置于所述箱体并用以感测位于所述箱体前的一对像,所述中央处理单元根据所述第一跟随传感模块对所述对象的感测结果,控制所述致动轮模块驱动所述箱体跟随位于所述箱体前的所述对象
自驱动行李箱及自驱动装置.pdf
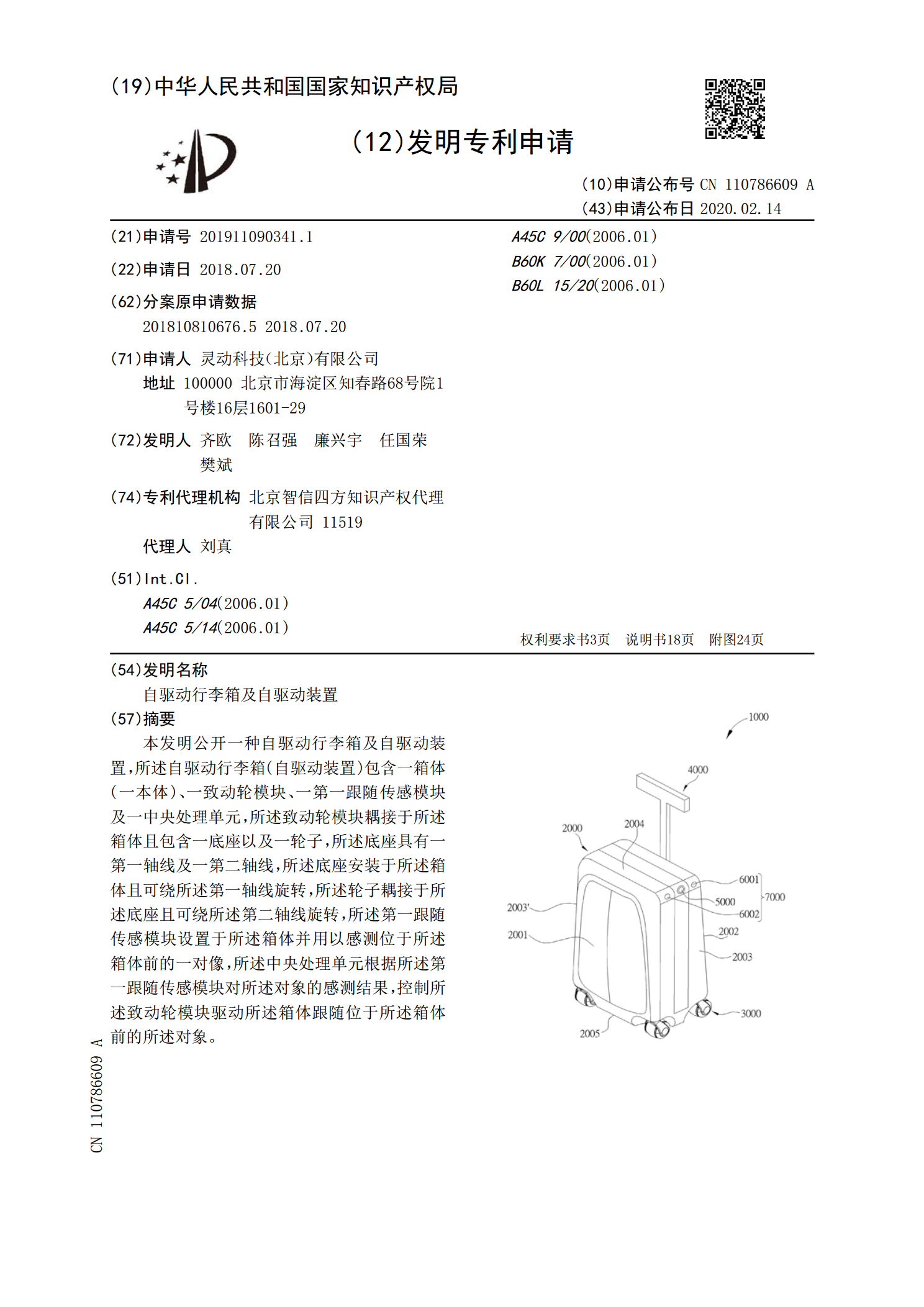
本发明公开一种自驱动行李箱及自驱动装置,所述自驱动行李箱(自驱动装置)包含一箱体(一本体)、一致动轮模块、一第一跟随传感模块及一中央处理单元,所述致动轮模块耦接于所述箱体且包含一底座以及一轮子,所述底座具有一第一轴线及一第二轴线,所述底座安装于所述箱体且可绕所述第一轴线旋转,所述轮子耦接于所述底座且可绕所述第二轴线旋转,所述第一跟随传感模块设置于所述箱体并用以感测位于所述箱体前的一对像,所述中央处理单元根据所述第一跟随传感模块对所述对象的感测结果,控制所述致动轮模块驱动所述箱体跟随位于所述箱体前的所述对象
自驱动行李箱及自驱动底盘.pdf
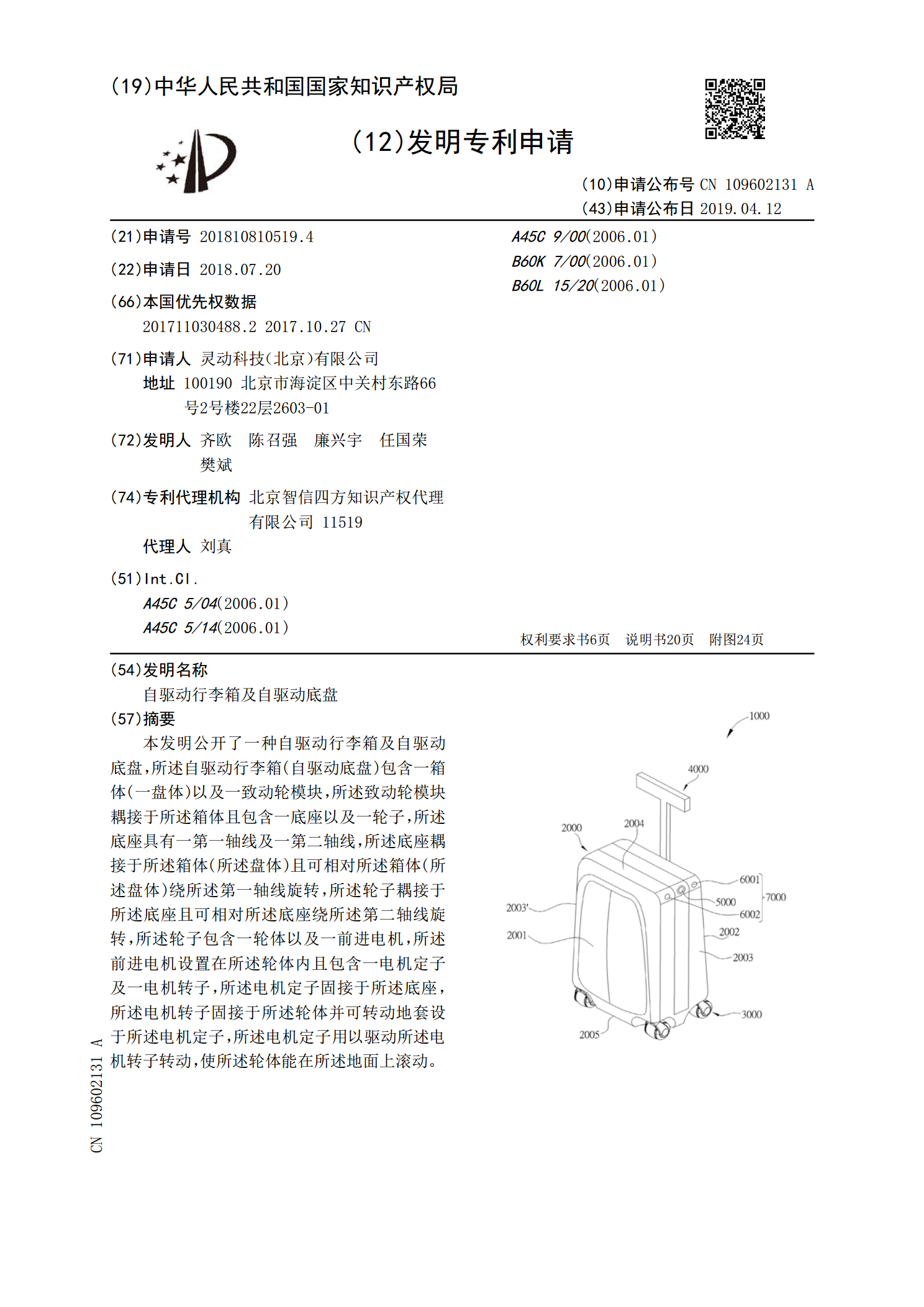
本发明公开了一种自驱动行李箱及自驱动底盘,所述自驱动行李箱(自驱动底盘)包含一箱体(一盘体)以及一致动轮模块,所述致动轮模块耦接于所述箱体且包含一底座以及一轮子,所述底座具有一第一轴线及一第二轴线,所述底座耦接于所述箱体(所述盘体)且可相对所述箱体(所述盘体)绕所述第一轴线旋转,所述轮子耦接于所述底座且可相对所述底座绕所述第二轴线旋转,所述轮子包含一轮体以及一前进电机,所述前进电机设置在所述轮体内且包含一电机定子及一电机转子,所述电机定子固接于所述底座,所述电机转子固接于所述轮体并可转动地套设于所述电机定

自锁紧回转驱动装置.pdf
本发明提供一种自锁紧回转驱动装置,包括基座、回转支承、蜗杆组和自锁紧装置,所述自动锁紧装置由固定座、推杆、夹紧杆等组成,推杆在控制机构的控制下可以做直线往复运动,并带动夹紧杆沿蜗杆组轴线方向作往复运动,达到锁紧蜗杆组与回转支承齿侧间隙的目的,实现回转驱动装置的精确定位,提高使用寿命。本发明结构合理、性能优良、稳定可靠等优点。