
穿戴式助力外骨骼机器人.pdf

书生****35

1/10
2/10
3/10
4/10
5/10
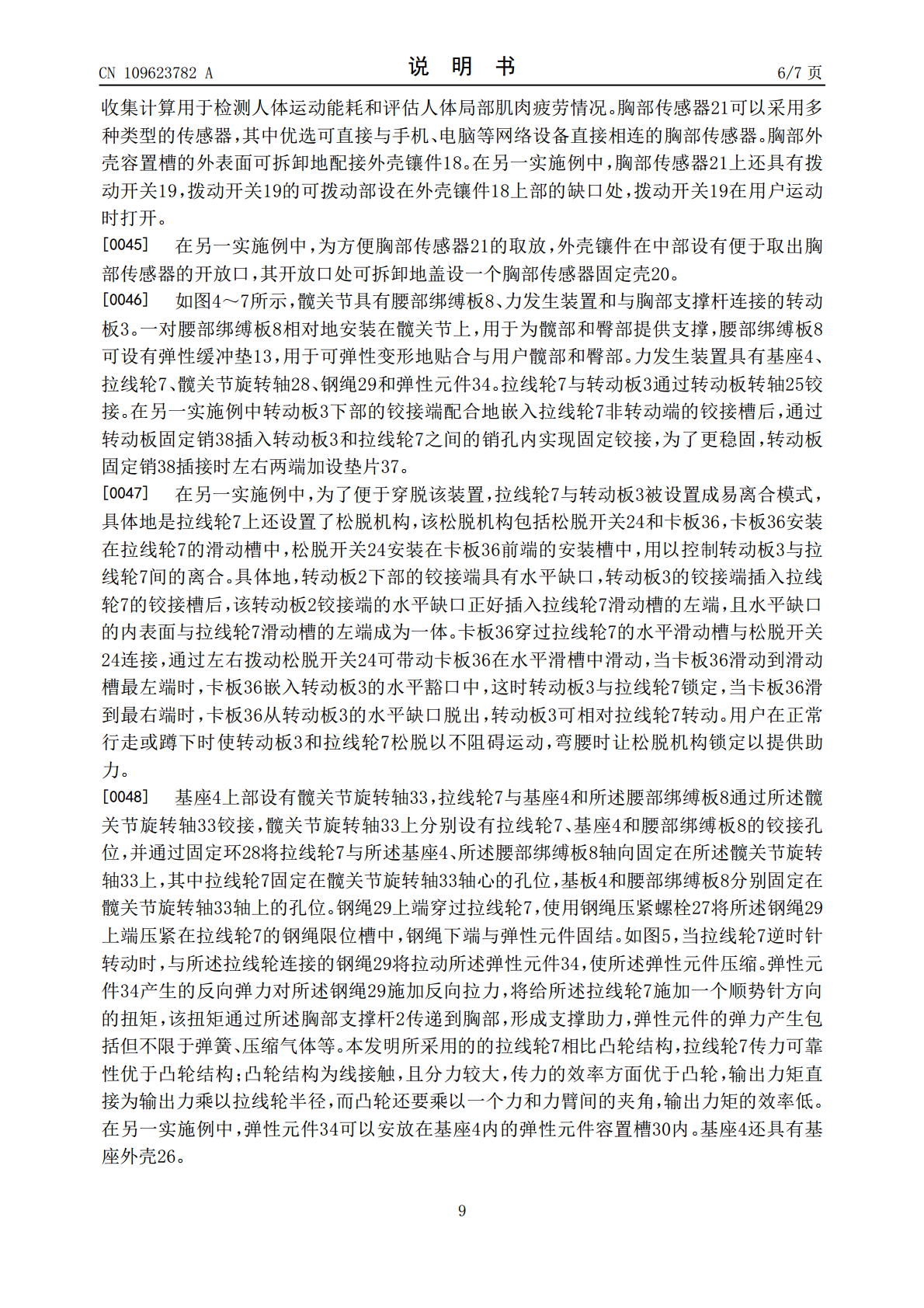
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
穿戴式助力外骨骼机器人.pdf
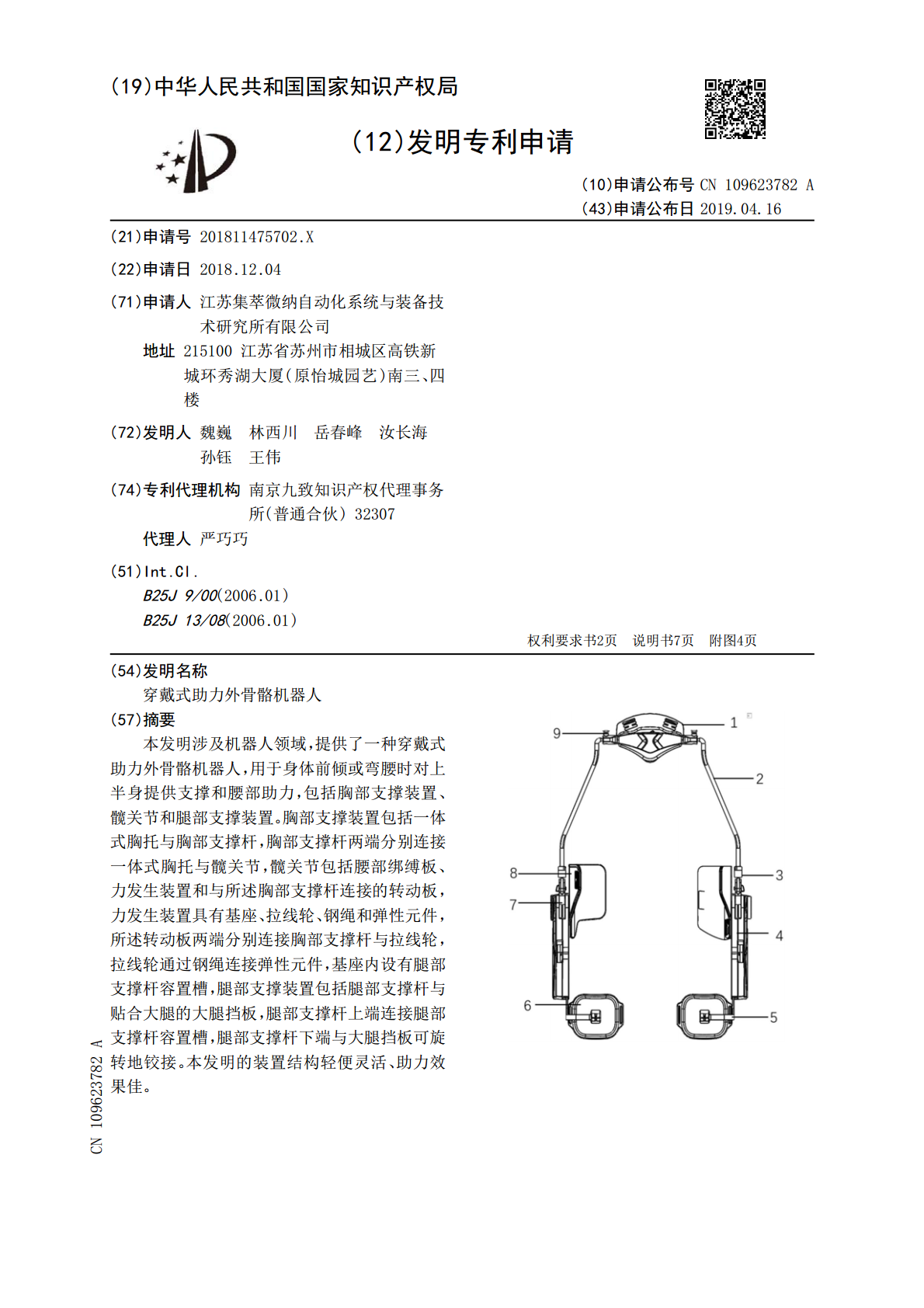
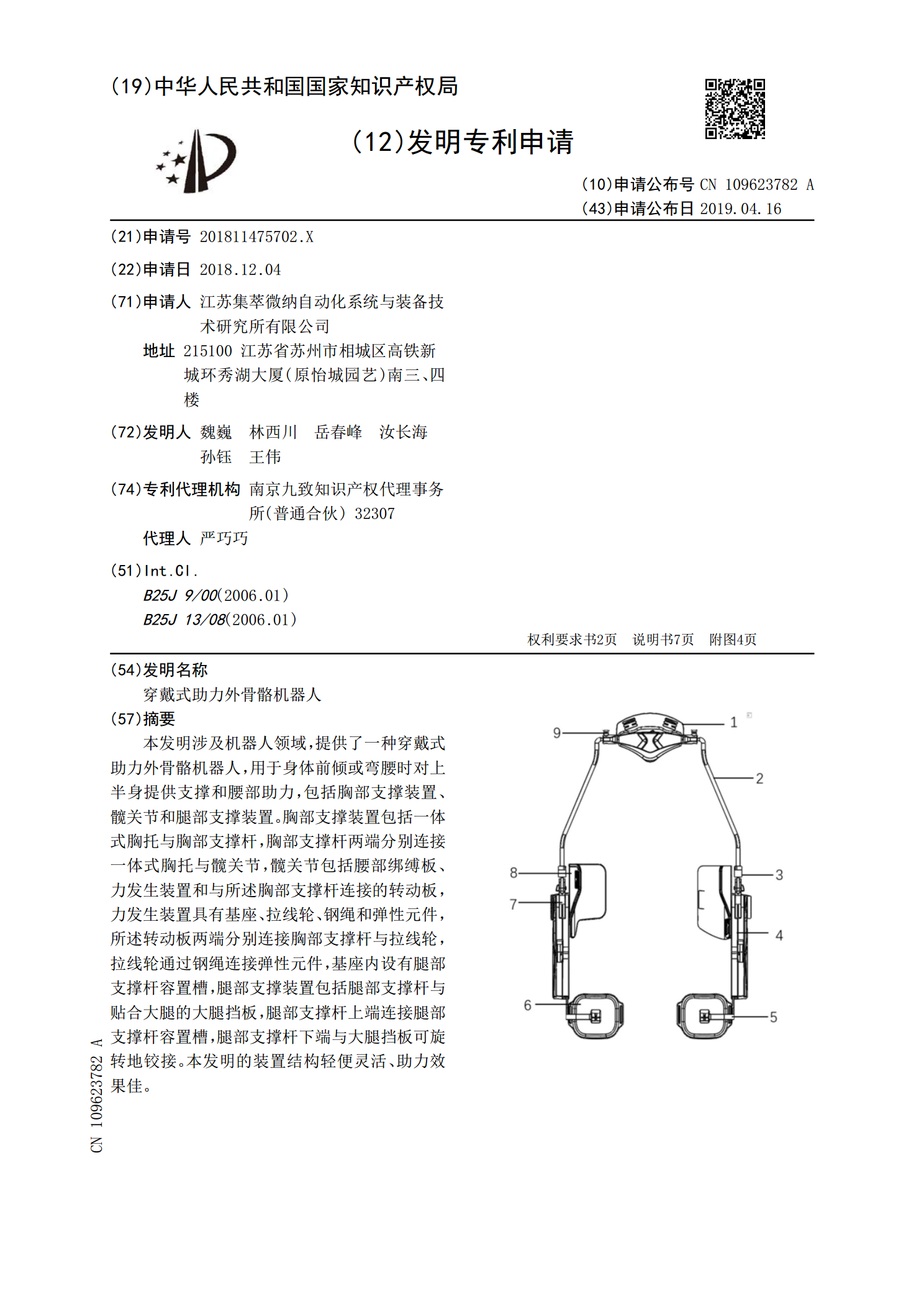
本发明涉及机器人领域,提供了一种穿戴式助力外骨骼机器人,用于身体前倾或弯腰时对上半身提供支撑和腰部助力,包括胸部支撑装置、髋关节和腿部支撑装置。胸部支撑装置包括一体式胸托与胸部支撑杆,胸部支撑杆两端分别连接一体式胸托与髋关节,髋关节包括腰部绑缚板、力发生装置和与所述胸部支撑杆连接的转动板,力发生装置具有基座、拉线轮、钢绳和弹性元件,所述转动板两端分别连接胸部支撑杆与拉线轮,拉线轮通过钢绳连接弹性元件,基座内设有腿部支撑杆容置槽,腿部支撑装置包括腿部支撑杆与贴合大腿的大腿挡板,腿部支撑杆上端连接腿部支撑杆容

外骨骼穿戴式助力助行机器人技术综述.pptx
,CONTENTS01.02.技术定义技术起源技术原理技术特点03.技术发展背景技术发展历程技术发展现状技术发展趋势04.医疗康复领域军事领域工业领域体育领域其他领域05.技术挑战解决方案技术创新与突破技术发展前景展望06.对人类生活的影响对社会发展的价值对未来产业发展的影响与推动作用感谢您的观看!
穿戴式外骨骼肩部助力设备.pdf
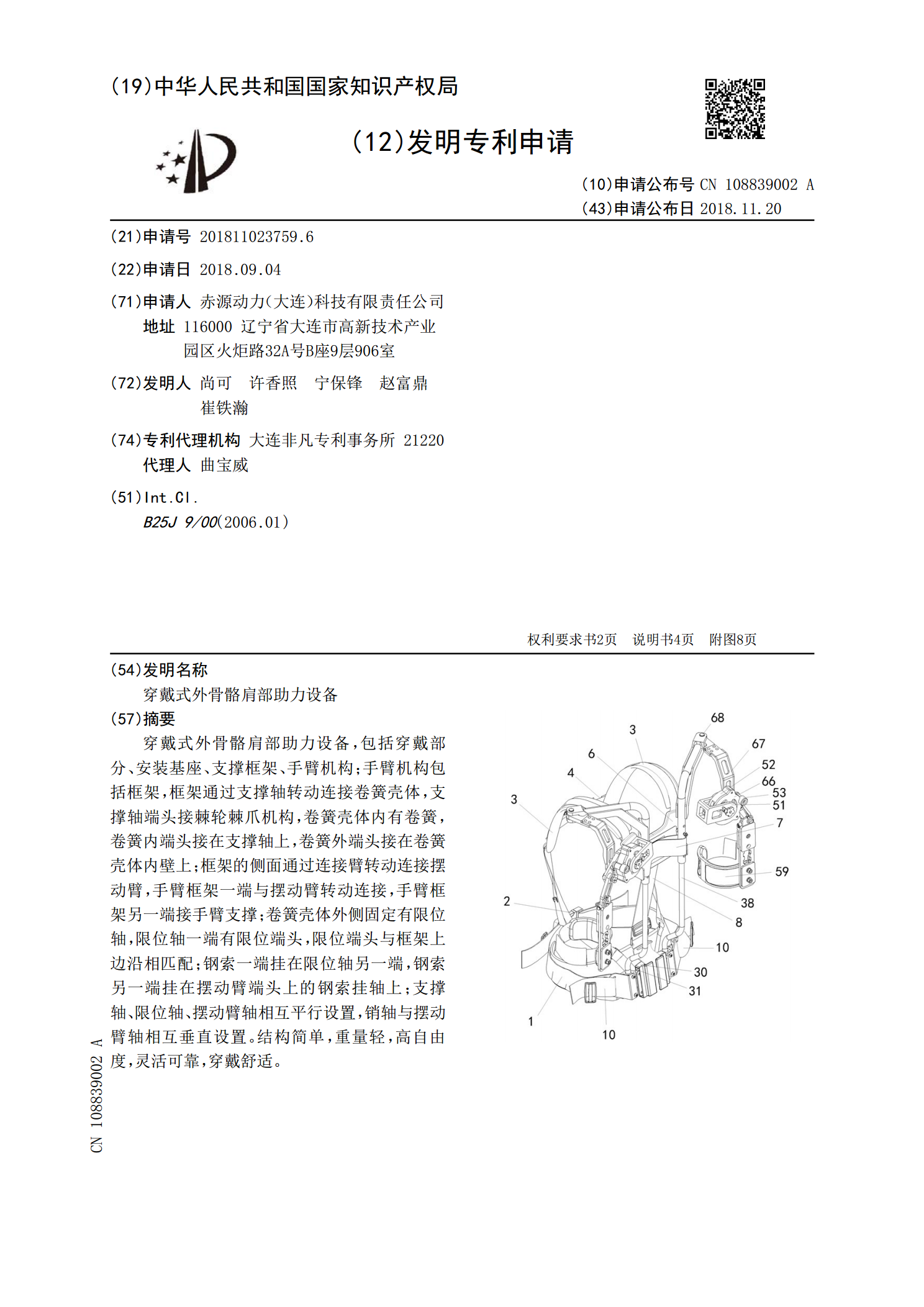
穿戴式外骨骼肩部助力设备,包括穿戴部分、安装基座、支撑框架、手臂机构;手臂机构包括框架,框架通过支撑轴转动连接卷簧壳体,支撑轴端头接棘轮棘爪机构,卷簧壳体内有卷簧,卷簧内端头接在支撑轴上,卷簧外端头接在卷簧壳体内壁上;框架的侧面通过连接臂转动连接摆动臂,手臂框架一端与摆动臂转动连接,手臂框架另一端接手臂支撑;卷簧壳体外侧固定有限位轴,限位轴一端有限位端头,限位端头与框架上边沿相匹配;钢索一端挂在限位轴另一端,钢索另一端挂在摆动臂端头上的钢索挂轴上;支撑轴、限位轴、摆动臂轴相互平行设置,销轴与摆动臂轴相互垂
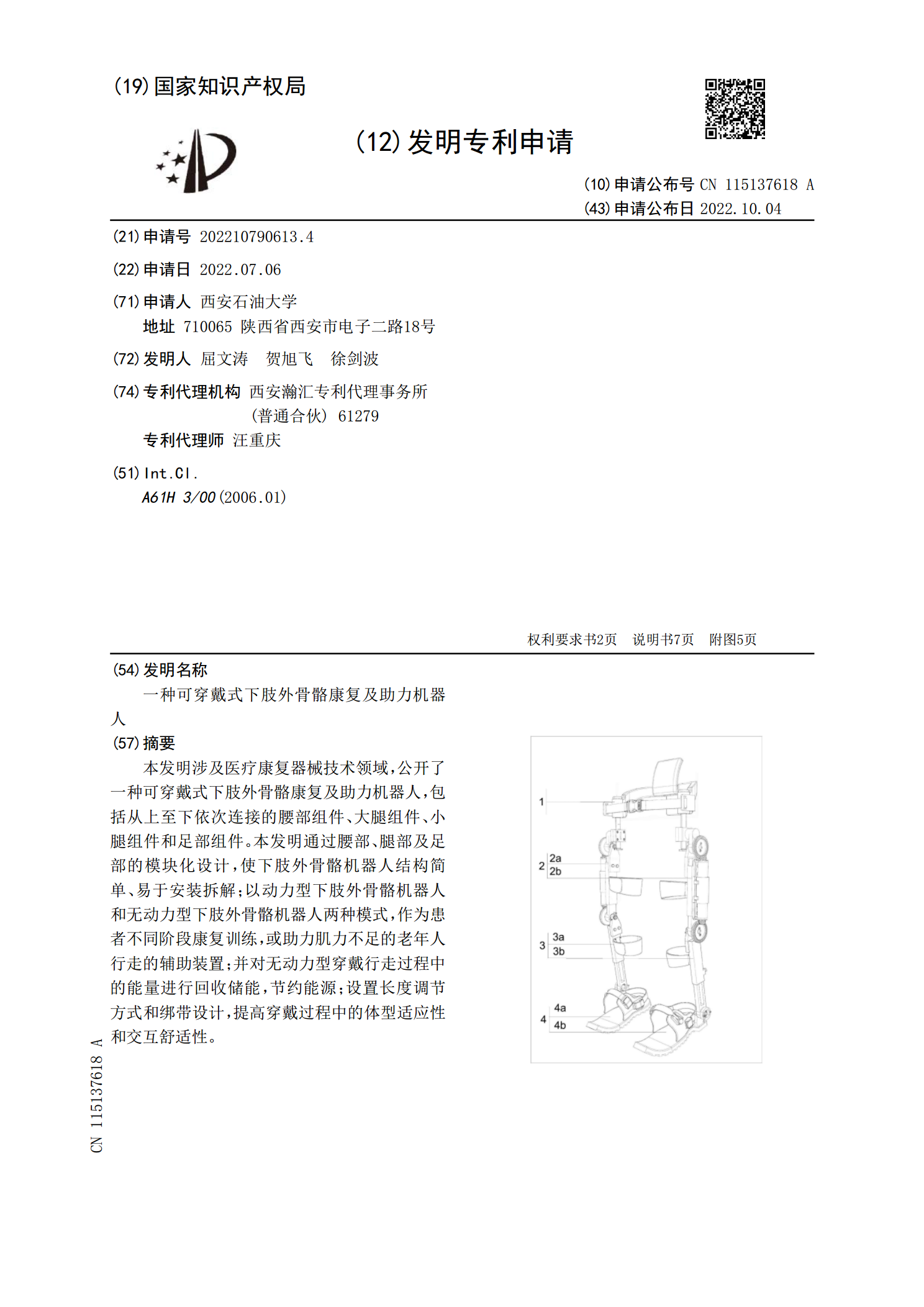
一种可穿戴式下肢外骨骼康复及助力机器人.pdf
本发明涉及医疗康复器械技术领域,公开了一种可穿戴式下肢外骨骼康复及助力机器人,包括从上至下依次连接的腰部组件、大腿组件、小腿组件和足部组件。本发明通过腰部、腿部及足部的模块化设计,使下肢外骨骼机器人结构简单、易于安装拆解;以动力型下肢外骨骼机器人和无动力型下肢外骨骼机器人两种模式,作为患者不同阶段康复训练,或助力肌力不足的老年人行走的辅助装置;并对无动力型穿戴行走过程中的能量进行回收储能,节约能源;设置长度调节方式和绑带设计,提高穿戴过程中的体型适应性和交互舒适性。
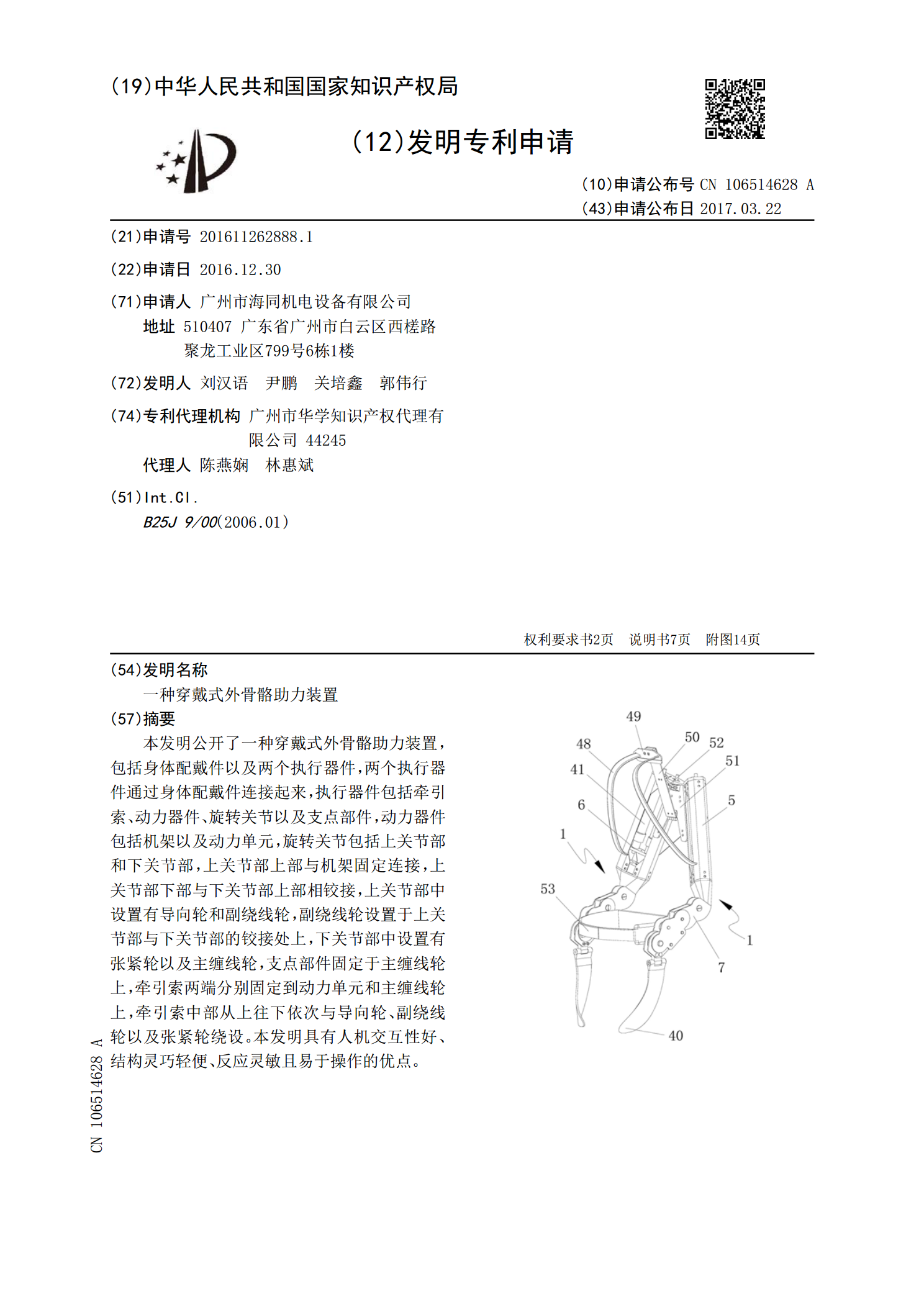
一种穿戴式外骨骼助力装置.pdf
本发明公开了一种穿戴式外骨骼助力装置,包括身体配戴件以及两个执行器件,两个执行器件通过身体配戴件连接起来,执行器件包括牵引索、动力器件、旋转关节以及支点部件,动力器件包括机架以及动力单元,旋转关节包括上关节部和下关节部,上关节部上部与机架固定连接,上关节部下部与下关节部上部相铰接,上关节部中设置有导向轮和副绕线轮,副绕线轮设置于上关节部与下关节部的铰接处上,下关节部中设置有张紧轮以及主缠线轮,支点部件固定于主缠线轮上,牵引索两端分别固定到动力单元和主缠线轮上,牵引索中部从上往下依次与导向轮、副绕线轮以及张