
一种用于机器人的可旋转抓取装置.pdf

是你****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于机器人的可旋转抓取装置.pdf
本发明涉及一种用于机器人的可旋转抓取装置,包括旋转盘、用于驱动旋转盘旋转的槽轮机构、均布于旋转盘上的四个抓取件;旋转盘包括用于安装抓取件的盘体、固设在盘体与槽轮之间的凸台;抓取件包括可形成负压腔的环形吸嘴和自环形吸嘴上端部向连接板方向延伸的加强块,加强块内预埋一连接管;连接管内设有一延伸至负压腔的气体通道,四个抓取件分别通过伸缩气缸与盘体下端面连接,伸缩气缸的缸体与盘体连接,伸缩气缸的伸缩杆与加强块固定连接,使得伸缩气缸带动与该伸缩气缸联接的抓取件做伸缩运动。本发明的可旋转抓取装置具有结构简单、使用方便、

一种机器人的可旋转抓取装置用抓取组件.pdf
本发明涉及一种机器人的可旋转抓取装置用抓取组件,包括均布于旋转盘下方的四个抓取件和四个伸缩气缸;抓取件包括可形成负压腔的环形吸嘴和自环形吸嘴上端部向连接板方向延伸的加强块,加强块内预埋一连接管;连接管内设有一延伸至负压腔的气体通道,环形吸嘴与待抓取物的光滑上表面接触,环形吸嘴内的气体由气体通道抽出,形成用于吸附待抓取物的真空区域;四个抓取件分别通过一伸缩气缸与旋转盘的下端面连接,旋转盘包括用于安装抓取件的盘体、固设在盘体与槽轮之间的凸台;伸缩气缸的缸体与盘体连接,伸缩气缸的伸缩杆与加强块的外壁固定连接。本
一种机器人的可旋转抓取装置用传动组件.pdf
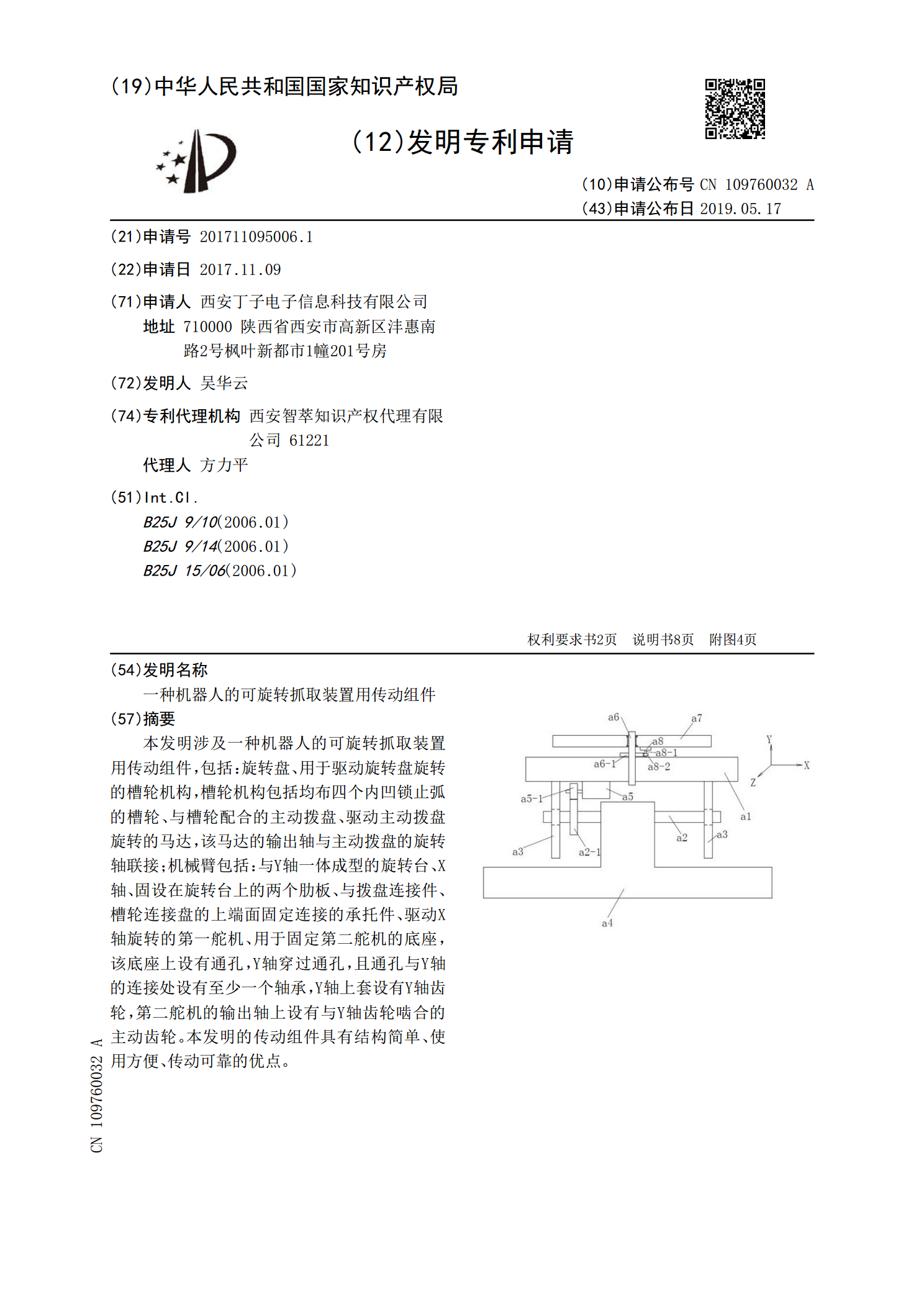
本发明涉及一种机器人的可旋转抓取装置用传动组件,包括:旋转盘、用于驱动旋转盘旋转的槽轮机构,槽轮机构包括均布四个内凹锁止弧的槽轮、与槽轮配合的主动拨盘、驱动主动拨盘旋转的马达,该马达的输出轴与主动拨盘的旋转轴联接;机械臂包括:与Y轴一体成型的旋转台、X轴、固设在旋转台上的两个肋板、与拨盘连接件、槽轮连接盘的上端面固定连接的承托件、驱动X轴旋转的第一舵机、用于固定第二舵机的底座,该底座上设有通孔,Y轴穿过通孔,且通孔与Y轴的连接处设有至少一个轴承,Y轴上套设有Y轴齿轮,第二舵机的输出轴上设有与Y轴齿轮啮合的

一种机器人的可旋转抓取装置用槽轮机构.pdf
本发明涉一种机器人的可旋转抓取装置用槽轮机构,包括均布四个内凹锁止弧的槽轮、用于驱动旋转盘旋转且与槽轮配合的主动拨盘、驱动主动拨盘旋转的马达,该马达的输出轴与主动拨盘的旋转轴联接,旋转轴与主动拨盘一体成型;主动拨盘包括:设有一弧形缺口的圆盘、设置在圆盘上方的转臂和圆柱销,圆柱销与转臂固定连接,圆盘的周壁与内凹锁止弧相配合,用于锁紧槽轮;槽轮上固设有从动轴,且相邻的内凹锁止弧之间设有供圆柱销切向进出的径向槽,槽轮在主动拨盘的带动下做周期性的转停运动;旋转盘包括用于安装抓取件的盘体、固设在盘体与槽轮之间的凸台

一种机器人的可旋转抓取装置用槽轮固定组件.pdf
本发明涉及一种机器人的可旋转抓取装置用槽轮固定组件,包括:设置于槽轮和旋转盘的中心处的从动轴、置于槽轮上方的槽轮连接盘、固设于旋转盘下方的固定盘,槽轮连接盘与机器人的机械臂固定连接,从动轴的两端设有与螺母配合的外螺纹,从动轴依序穿过槽轮连接盘、槽轮、旋转盘和固定盘后,从动轴的两端分别通过螺母固定连接;槽轮连接盘与槽轮之间、旋转盘与固定盘之间均内嵌若干个滚珠,槽轮与从动轴的连接处设有轴承,旋转盘与从动轴的连接处也设有至少一个轴承。本发明的槽轮固定组件在满足可旋转抓取装置基本要求的前提下具有稳定性好、安拆方便