
伺服驱动多关节仿生手.pdf

猫巷****晓容

1/7
2/7
3/7
4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

伺服驱动多关节仿生手.pdf
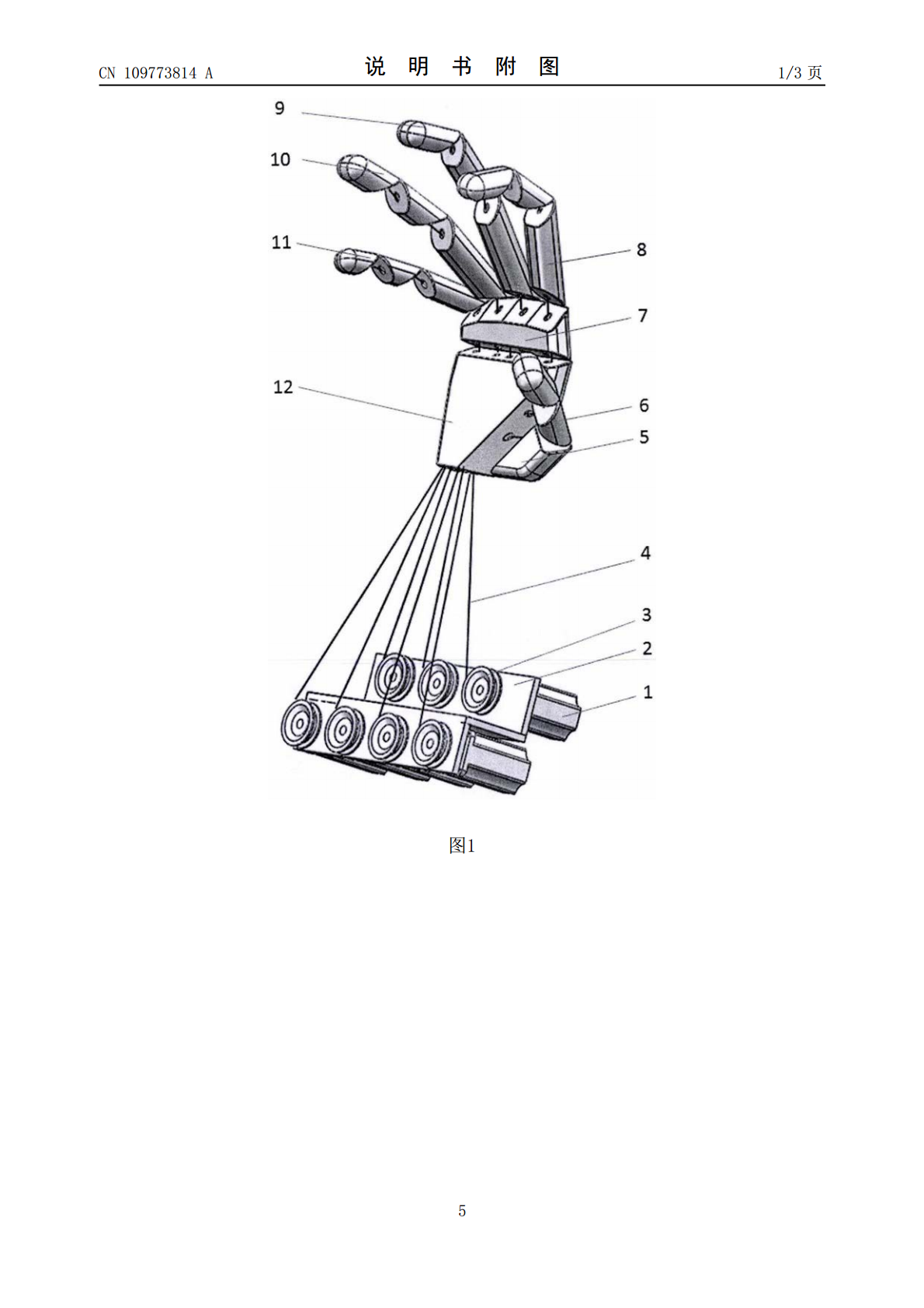
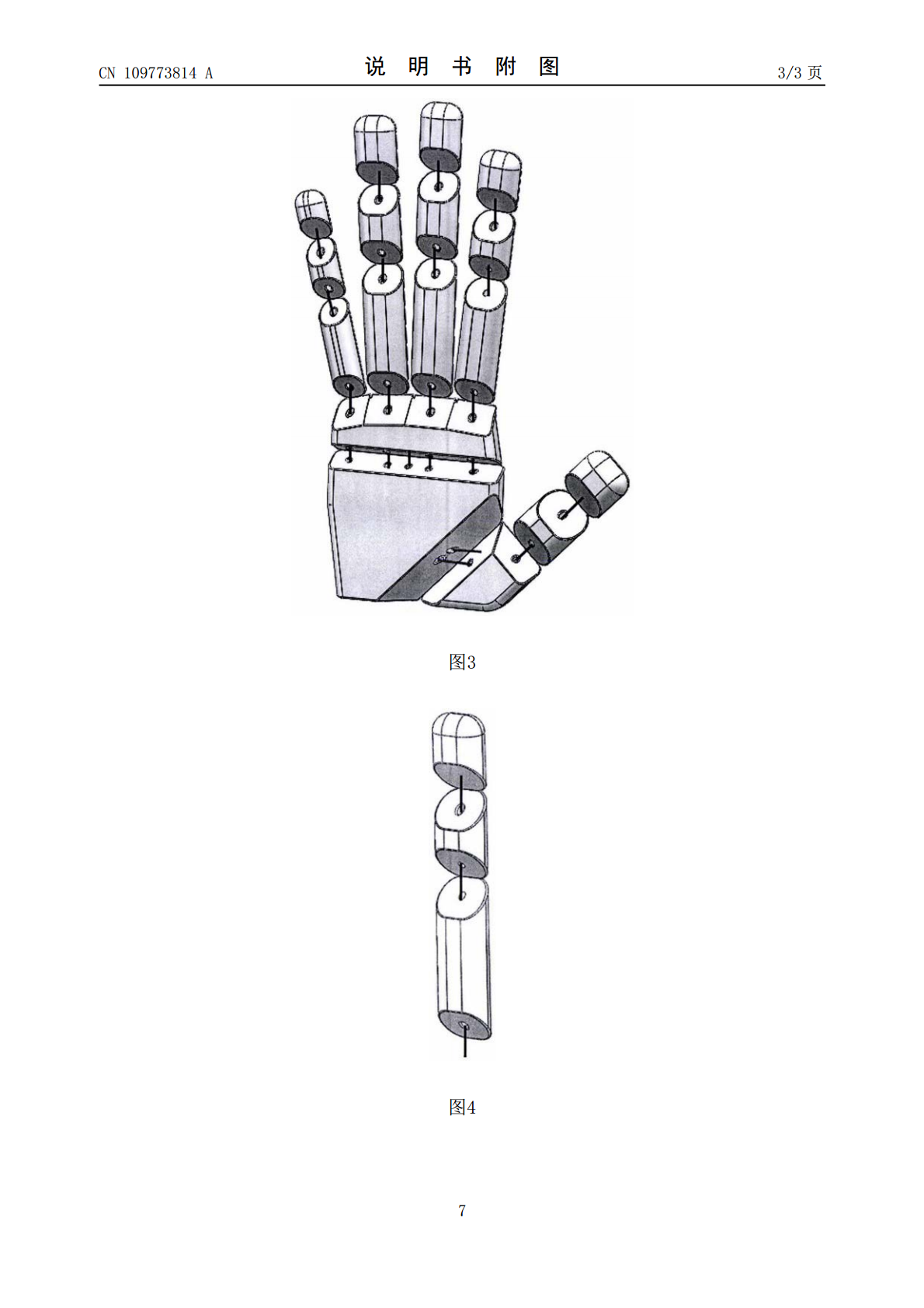
本发明解决的技术问题是提供了一种伺服驱动多关节仿生手。首先将仿生手各部分用弹性硅胶带粘接固定,每组运动关节用一根尼龙线带动,各尼龙线一端缠绕在各个绕线轮上,另一端穿过仿生手各部分的通孔,分别固定在各关节运动部分的末端。当伺服电动机驱动绕线轮旋转,把尼龙绳收拢,带动连接各关节的弹性硅胶带弯曲,相应的仿生手各关节产生弯曲动作,通过伺服电动机的精确控制,可以使各关节运动到指定的位置;当伺服电动机驱动绕线轮反向旋转,把尼龙绳放松,弹性硅胶带复位,带动仿生手各关节恢复到平直的状态。本伺服驱动多关节仿生手可代替人手完

多马达驱动之伺服机.pdf
本发明涉及伺服机,公开了一种多马达驱动之伺服机,它包括至少两个马达、变速齿轮组,各马达顶面分别连接有马达轴,各马达轴上分别连接有马达齿轮,各马达齿轮与变速齿轮组内同一级的变速齿轮相连接。齿轮采用本发明,输出扭力更大,马达电极与电刷分担后的电流小,发热量更小、磨耗故障率更低、使用寿命更长、使用更安全。
气动人工肌肉与伺服电机混合驱动关节.pdf
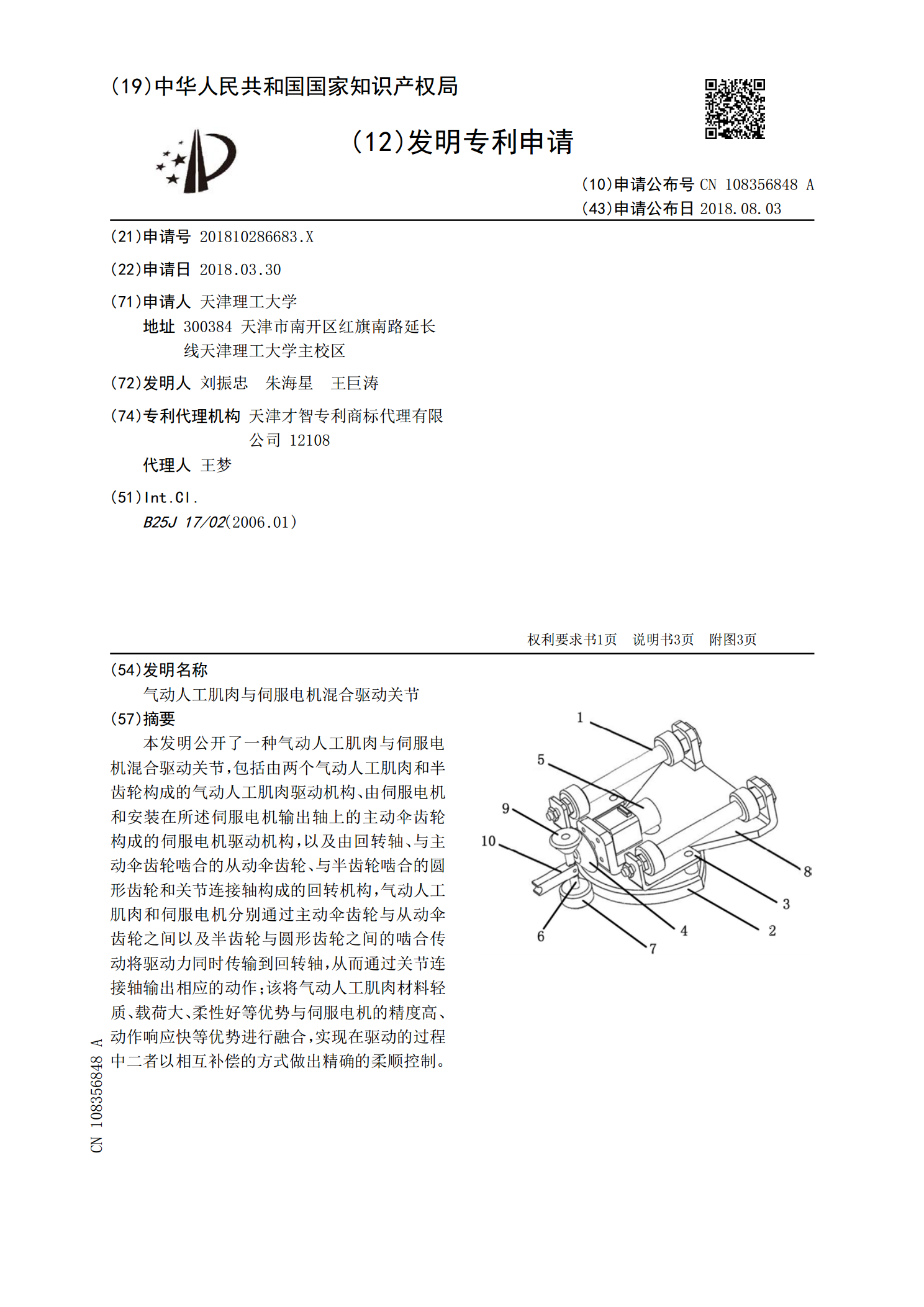
本发明公开了一种气动人工肌肉与伺服电机混合驱动关节,包括由两个气动人工肌肉和半齿轮构成的气动人工肌肉驱动机构、由伺服电机和安装在所述伺服电机输出轴上的主动伞齿轮构成的伺服电机驱动机构,以及由回转轴、与主动伞齿轮啮合的从动伞齿轮、与半齿轮啮合的圆形齿轮和关节连接轴构成的回转机构,气动人工肌肉和伺服电机分别通过主动伞齿轮与从动伞齿轮之间以及半齿轮与圆形齿轮之间的啮合传动将驱动力同时传输到回转轴,从而通过关节连接轴输出相应的动作;该将气动人工肌肉材料轻质、载荷大、柔性好等优势与伺服电机的精度高、动作响应快等优势
基关节与指间关节各自独立驱动的仿人手指.pdf
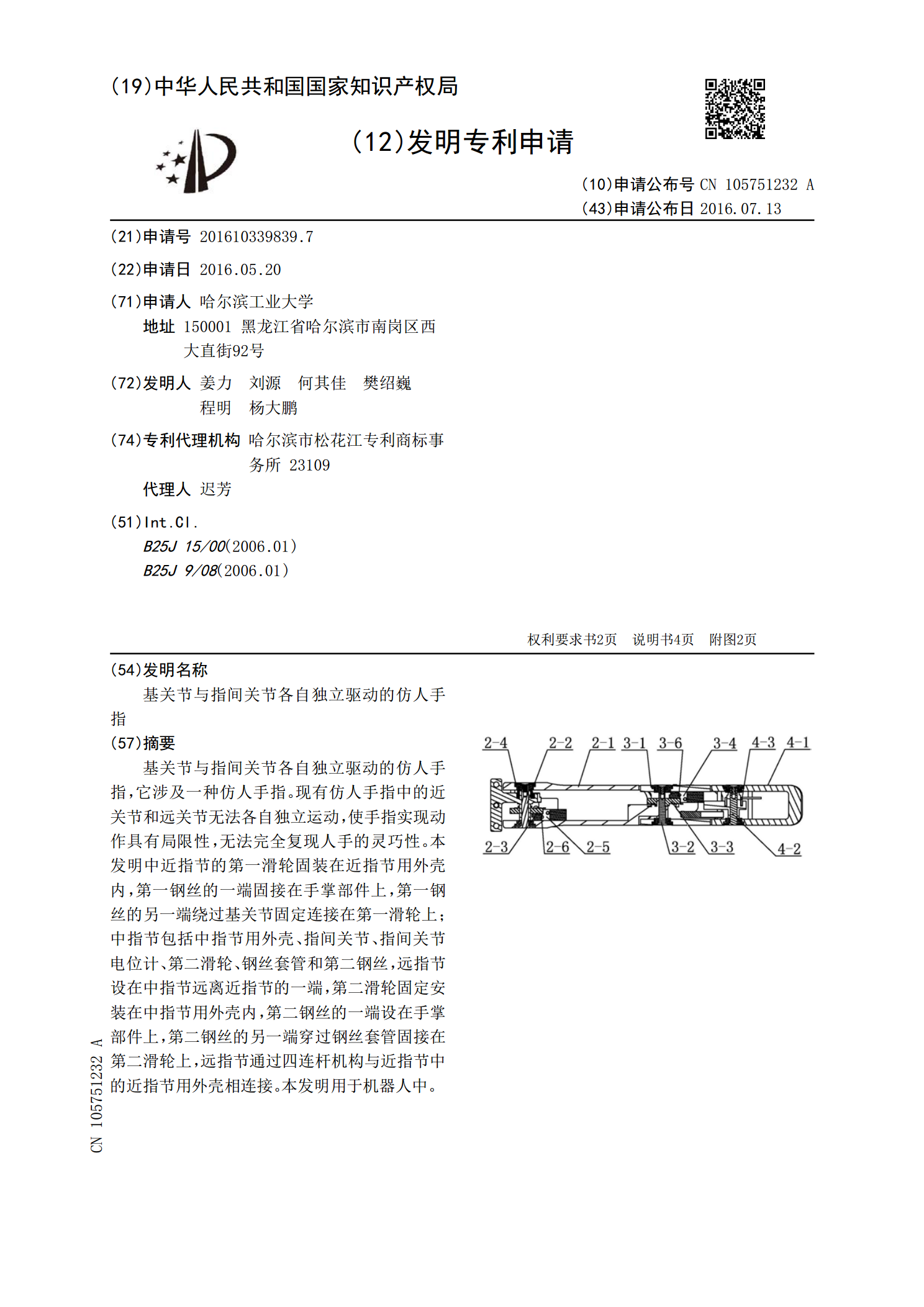
基关节与指间关节各自独立驱动的仿人手指,它涉及一种仿人手指。现有仿人手指中的近关节和远关节无法各自独立运动,使手指实现动作具有局限性,无法完全复现人手的灵巧性。本发明中近指节的第一滑轮固装在近指节用外壳内,第一钢丝的一端固接在手掌部件上,第一钢丝的另一端绕过基关节固定连接在第一滑轮上;中指节包括中指节用外壳、指间关节、指间关节电位计、第二滑轮、钢丝套管和第二钢丝,远指节设在中指节远离近指节的一端,第二滑轮固定安装在中指节用外壳内,第二钢丝的一端设在手掌部件上,第二钢丝的另一端穿过钢丝套管固接在第二滑轮上,
具有电源监测功能的多轴伺服驱动系统.pdf
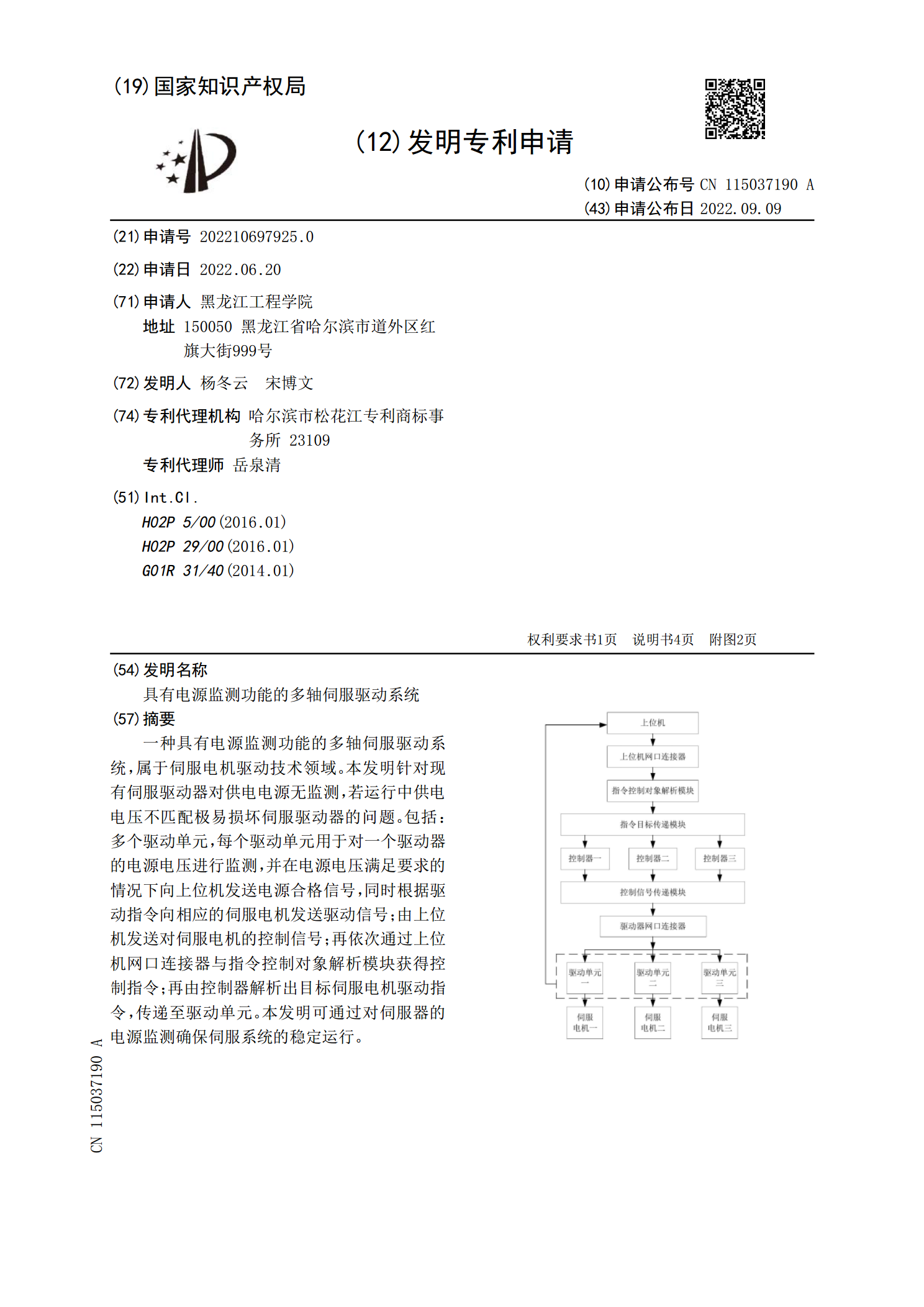
一种具有电源监测功能的多轴伺服驱动系统,属于伺服电机驱动技术领域。本发明针对现有伺服驱动器对供电电源无监测,若运行中供电电压不匹配极易损坏伺服驱动器的问题。包括:多个驱动单元,每个驱动单元用于对一个驱动器的电源电压进行监测,并在电源电压满足要求的情况下向上位机发送电源合格信号,同时根据驱动指令向相应的伺服电机发送驱动信号;由上位机发送对伺服电机的控制信号;再依次通过上位机网口连接器与指令控制对象解析模块获得控制指令;再由控制器解析出目标伺服电机驱动指令,传递至驱动单元。本发明可通过对伺服器的电源监测确保伺