
一种光伏组件清扫机器人及其越障控制方法和装置.pdf

宜欣****外呢


1/10

2/10

3/10

4/10

5/10

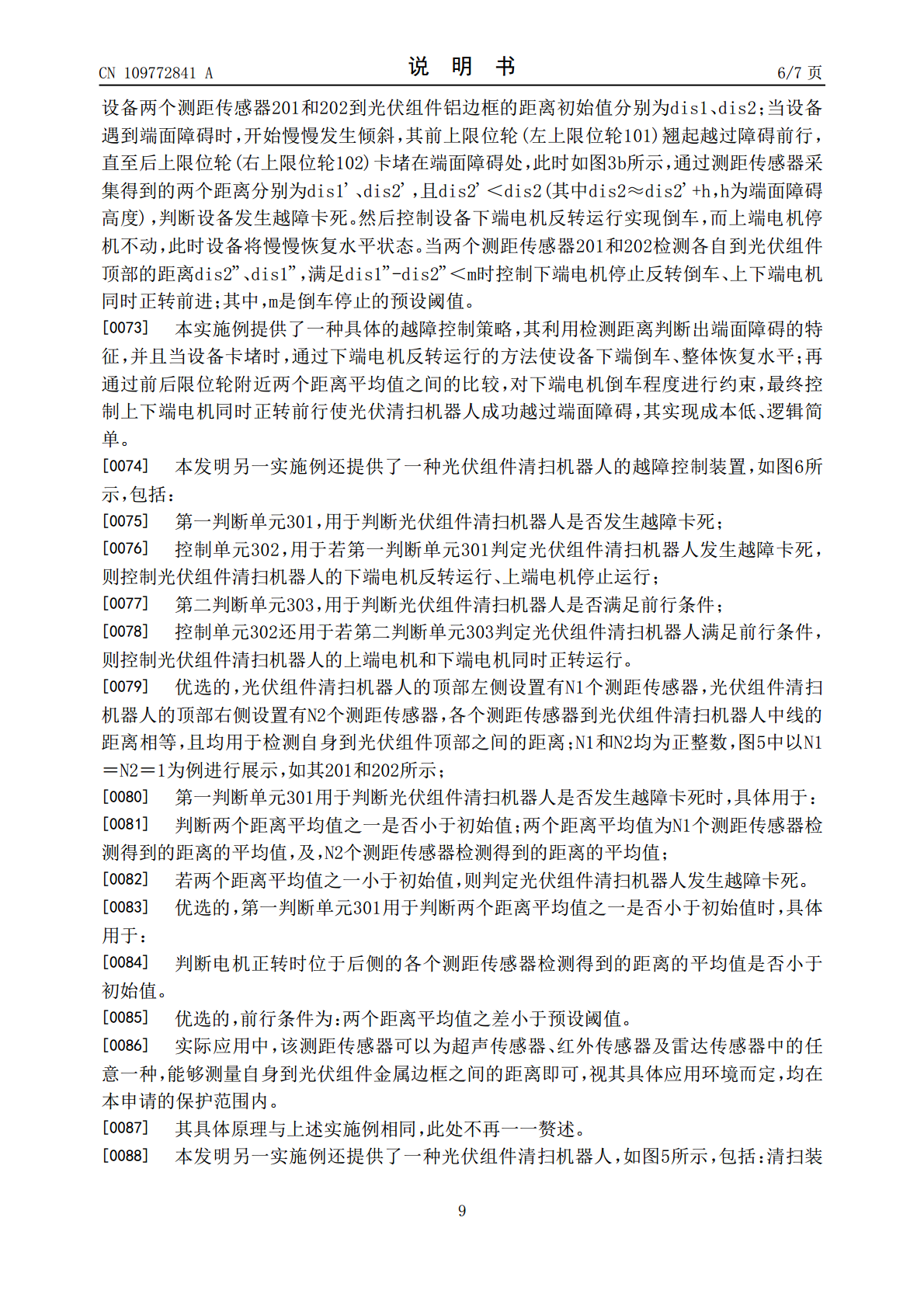
6/10

7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种光伏组件清扫机器人及其越障控制方法和装置.pdf
本发明提供的光伏组件清扫机器人及其越障控制方法和装置,在光伏组件清扫机器人发生越障卡死时,控制光伏组件清扫机器人的下端电机反转运行、使光伏组件清扫机器人的下限位轮倒行,并且控制光伏组件清扫机器人的上端电机停止运行、使光伏组件清扫机器人的上限位轮无驱动;进而使得光伏组件清扫机器人逐渐恢复水平状态,并在判断光伏组件清扫机器人满足前行条件后,控制光伏组件清扫机器人的上端电机和下端电机同时正转运行、实现前行,解决了现有技术中容易卡死在相邻组件落差处的问题。
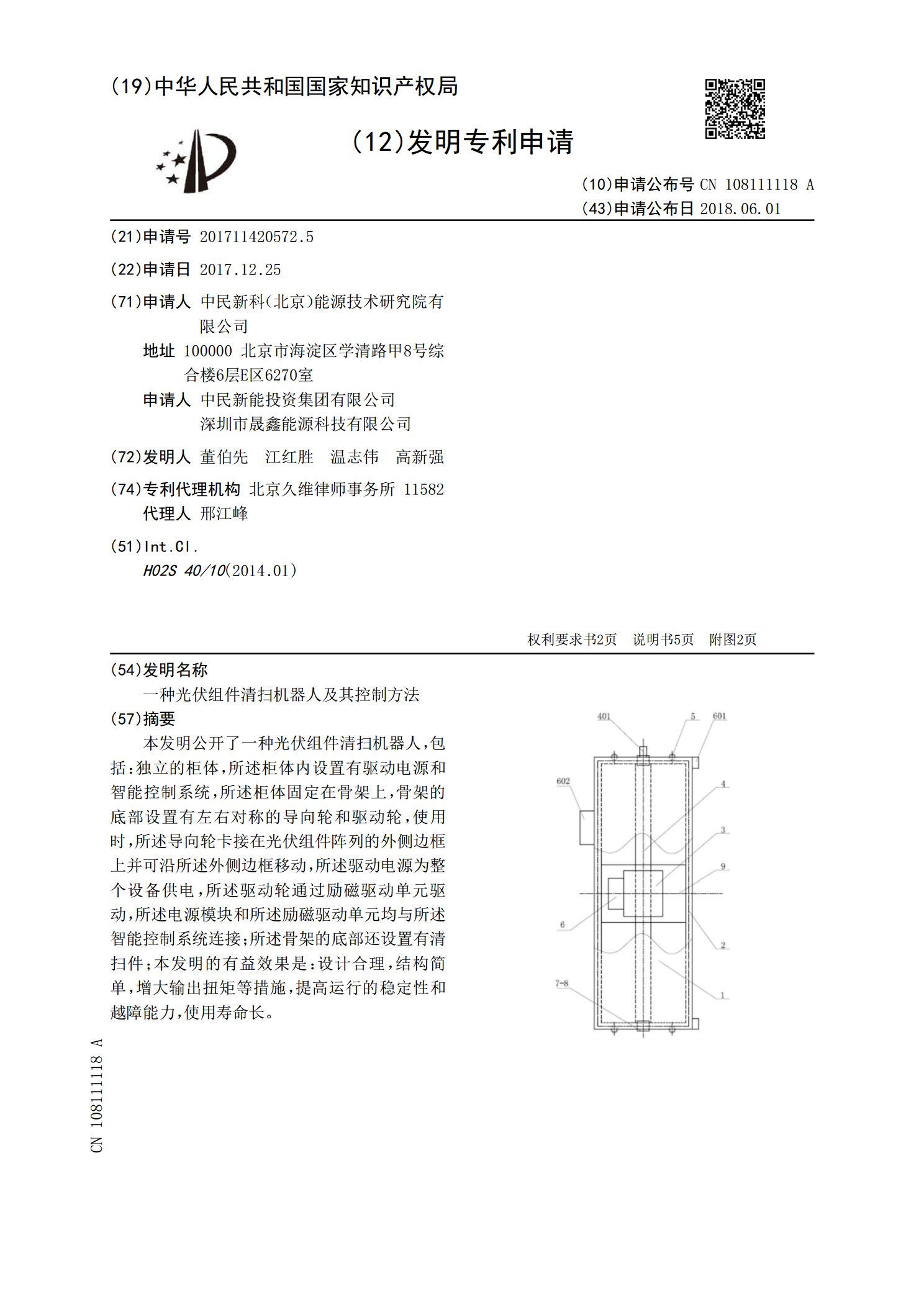
一种光伏组件清扫机器人及其控制方法.pdf
本发明公开了一种光伏组件清扫机器人,包括:独立的柜体,所述柜体内设置有驱动电源和智能控制系统,所述柜体固定在骨架上,骨架的底部设置有左右对称的导向轮和驱动轮,使用时,所述导向轮卡接在光伏组件阵列的外侧边框上并可沿所述外侧边框移动,所述驱动电源为整个设备供电,所述驱动轮通过励磁驱动单元驱动,所述电源模块和所述励磁驱动单元均与所述智能控制系统连接;所述骨架的底部还设置有清扫件;本发明的有益效果是:设计合理,结构简单,增大输出扭矩等措施,提高运行的稳定性和越障能力,使用寿命长。

一种弹性越障组件和光伏板清扫设备.pdf
本申请实施例公开了一种弹性越障组件和光伏板清扫设备,弹性越障组件包括:支撑架、轴承和越障轮,支撑架由至少三个支架组成,越障轮安装于各个支架处;越障轮安装于各个支架的下端,其中,支架的一端与轴承相连,支架的另一端与越障轮相连;支架与越障轮的连接处设有滑槽,滑槽用于实现越障轮向外避障方向的移动;越障轮与轴承之间设有弹簧组件,弹簧组件用于越障轮移动时提供反向恢复力,其中,各个弹簧组件在轴承的交汇处设置有弹簧挡脚座,弹簧挡脚座位于轴承的正下方;以解决相关技术中清扫光伏组件时越障能力不足的问题。

一种光伏组件的清扫机构及其控制方法.pdf
本发明公开了一种光伏组件的清扫机构及其控制方法,本发明中支架体设置有活动支腿,当清扫机器人需要跨组串移动时,活动支腿的自由端支撑于光伏板的相应位置,支架体相对活动支腿前伸至下一排光伏组串的上方后,再通过前支腿和后支腿支撑于该工位,因活动支腿上设置有搭载清扫机器人的搭载装置,清扫机器人存放至搭载装置,随活动支腿一起沿支架体移动至下一排光伏组串的上方,然后再从搭载装置转移至该排的光伏组串的光伏板,从而实现了清扫机器人的跨组串移动,通过该清扫机构能够实现清扫机器人对所有光伏组串的自动清扫,提高清扫效率。
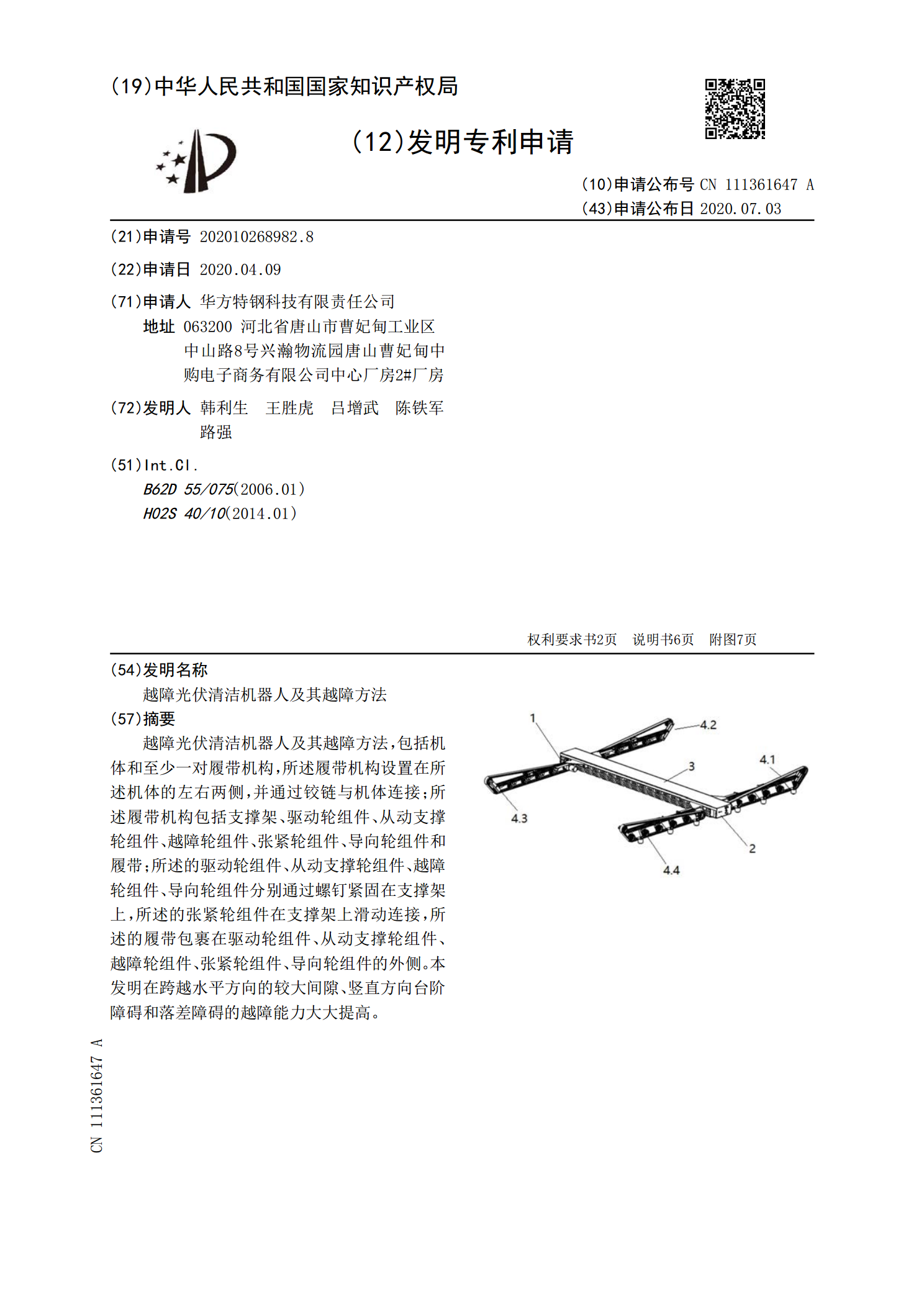
越障光伏清洁机器人及其越障方法.pdf
越障光伏清洁机器人及其越障方法,包括机体和至少一对履带机构,所述履带机构设置在所述机体的左右两侧,并通过铰链与机体连接;所述履带机构包括支撑架、驱动轮组件、从动支撑轮组件、越障轮组件、张紧轮组件、导向轮组件和履带;所述的驱动轮组件、从动支撑轮组件、越障轮组件、导向轮组件分别通过螺钉紧固在支撑架上,所述的张紧轮组件在支撑架上滑动连接,所述的履带包裹在驱动轮组件、从动支撑轮组件、越障轮组件、张紧轮组件、导向轮组件的外侧。本发明在跨越水平方向的较大间隙、竖直方向台阶障碍和落差障碍的越障能力大大提高。