
驱动源控制装置和具有该驱动源控制装置的车辆.pdf

一条****轩吗

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
驱动源控制装置和具有该驱动源控制装置的车辆.pdf
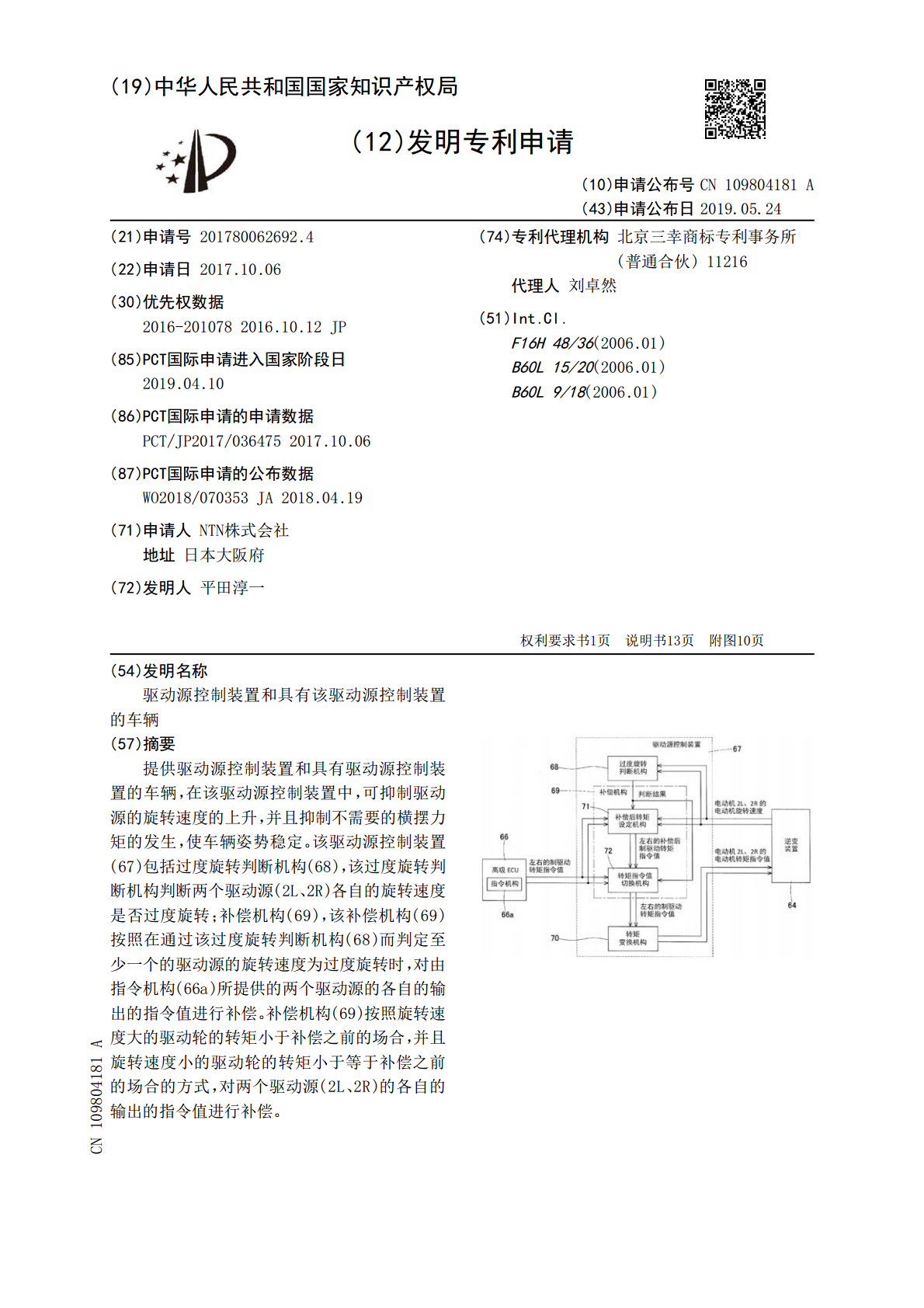
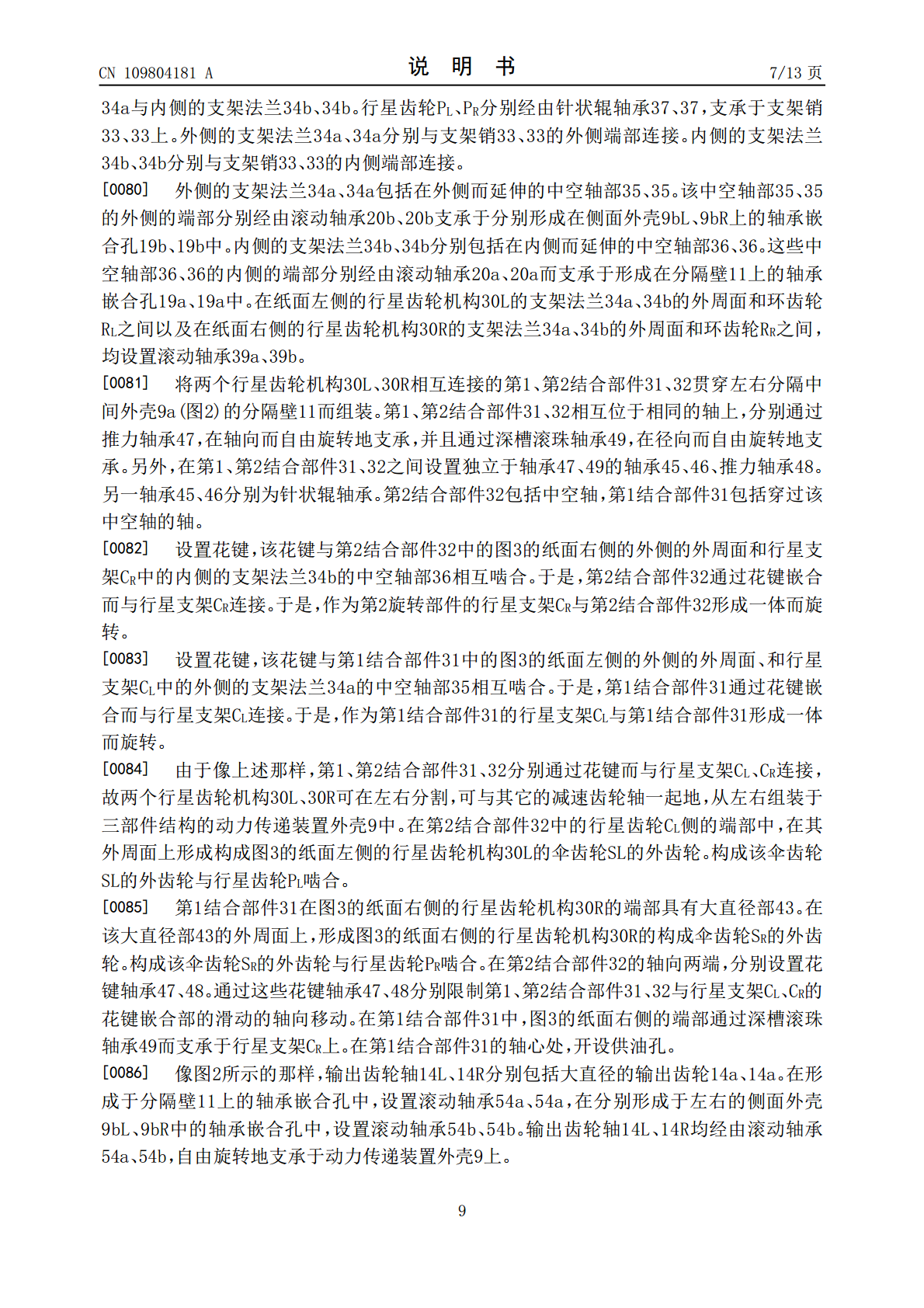
提供驱动源控制装置和具有驱动源控制装置的车辆,在该驱动源控制装置中,可抑制驱动源的旋转速度的上升,并且抑制不需要的横摆力矩的发生,使车辆姿势稳定。该驱动源控制装置(67)包括过度旋转判断机构(68),该过度旋转判断机构判断两个驱动源(2L、2R)各自的旋转速度是否过度旋转;补偿机构(69),该补偿机构(69)按照在通过该过度旋转判断机构(68)而判定至少一个的驱动源的旋转速度为过度旋转时,对由指令机构(66a)所提供的两个驱动源的各自的输出的指令值进行补偿。补偿机构(69)按照旋转速度大的驱动轮的转矩小于
驱动装置和具有该驱动装置的车辆.pdf
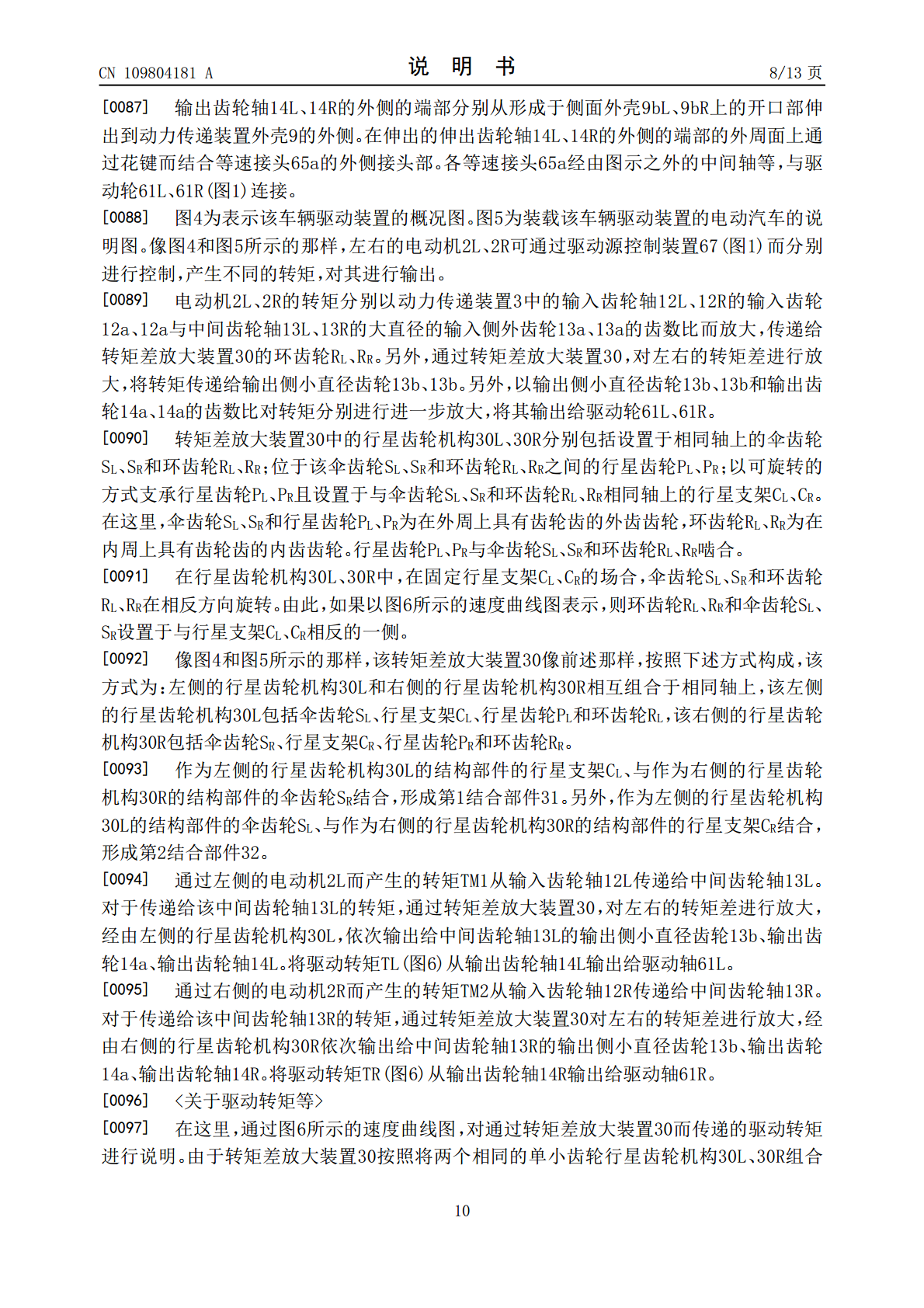
本发明提供驱动装置和具有该驱动装置的车辆。驱动装置具有电动机、小滑轮、传动轴、大滑轮、环、小齿轮以及大齿轮。小滑轮与电动机的旋转轴固定在同轴上。传动轴与旋转轴平行地配置。大滑轮与传动轴固定在同轴上,径向的尺寸比小滑轮大。环为圆环状,能够从径向外侧同时与小滑轮和大滑轮接触。小齿轮与传动轴固定在同轴上。大齿轮设置为能够相对于旋转轴相对旋转,齿数比小齿轮多,与小齿轮啮合。

驱动装置及具有该驱动装置的车辆.pdf
驱动装置(1A)具有:电动机(2A、2B),其输出驱动力;行星齿轮式减速器(12A、12B),其配置在电动机(2A、2B)的输出轴即圆筒轴(16A、16B)和与后轮(LWr、RWr)连结的车轴(10A、10B)之间,其中,具有配置在从电动机(2A、2B)至车轴(10A、10B)的传递路径上,并将电动机(2A、2B)的单向的旋转动力传递给车轴(10A、10B)的单向动力传递机构和将电动机(2A、2B)的双向的旋转动力传递给车轴(10A、10B)的双向动力传递机构。
用于车辆的驱动装置,包括该驱动装置的车辆以及控制该驱动装置的方法.pdf
本发明涉及一种用于车辆的驱动装置,其中该装置(2)包括内燃机(4)的输出轴(14),变速器(8)的输入轴(27),包括定子(24)和转子(26)的电机(6),包括可移动元件(18,20,22)的行星齿轮机构(10),和在第一和第二位置之间可移动的锁定机构(38),在第一位置,内燃机(4)的输出轴(14)和变速器(8)的输入轴(27)通过行星齿轮机构(10)而被允许以不同的速度旋转,并且在第二位置,锁定机构(38)将内燃机(4)的输出轴(14)通过行星齿轮机构(10)刚性地连接到变速器(8)的输入轴(27)
驱动源控制装置.pdf
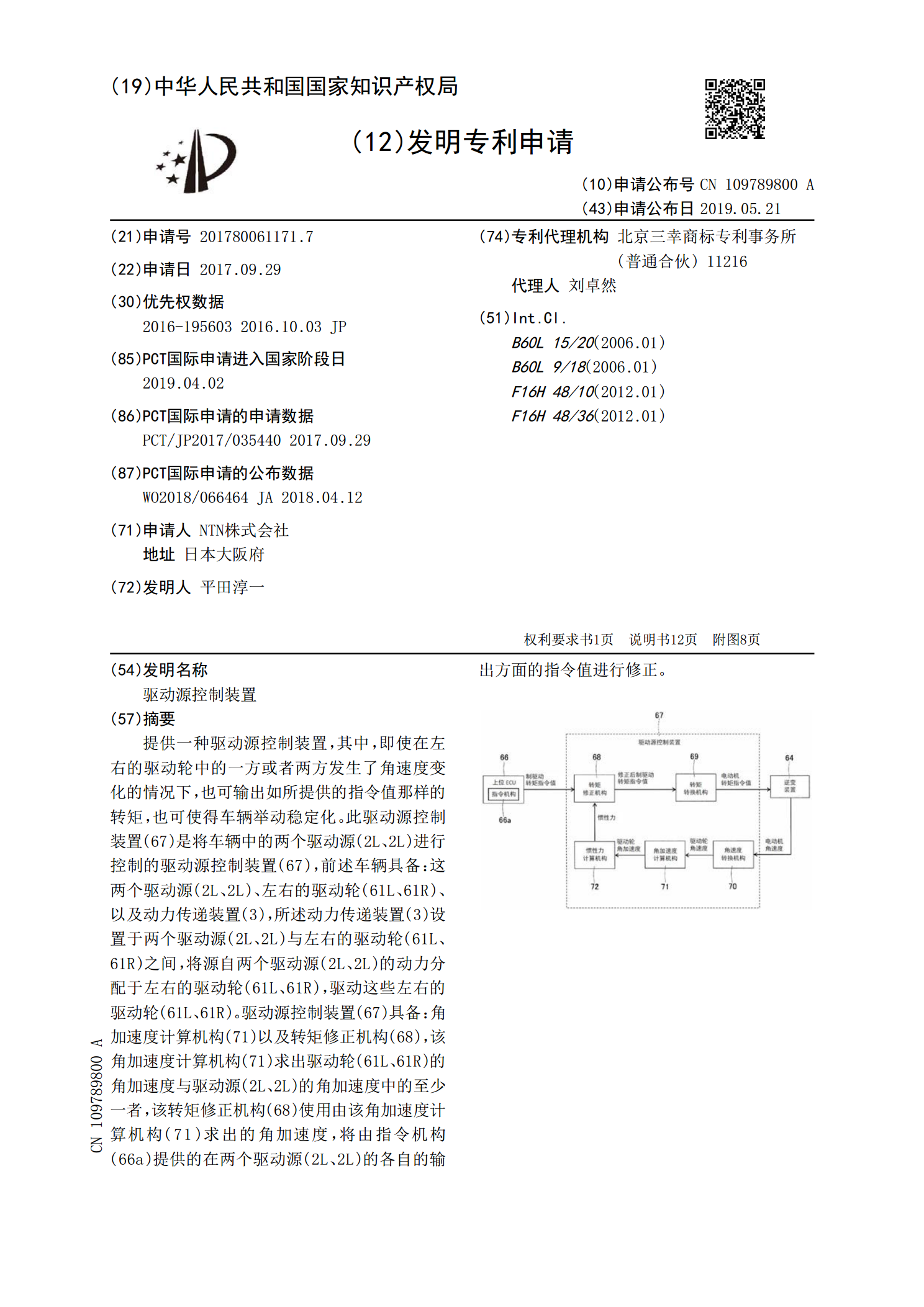
提供一种驱动源控制装置,其中,即使在左右的驱动轮中的一方或者两方发生了角速度变化的情况下,也可输出如所提供的指令值那样的转矩,也可使得车辆举动稳定化。此驱动源控制装置(67)是将车辆中的两个驱动源(2L、2L)进行控制的驱动源控制装置(67),前述车辆具备:这两个驱动源(2L、2L)、左右的驱动轮(61L、61R)、以及动力传递装置(3),所述动力传递装置(3)设置于两个驱动源(2L、2L)与左右的驱动轮(61L、61R)之间,将源自两个驱动源(2L、2L)的动力分配于左右的驱动轮(61L、61R),驱动