
基于轮毂电机的车轮机构、电动无人车底盘和电动无人车.pdf

书生****萌哒

1/10
2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于轮毂电机的车轮机构、电动无人车底盘和电动无人车.pdf
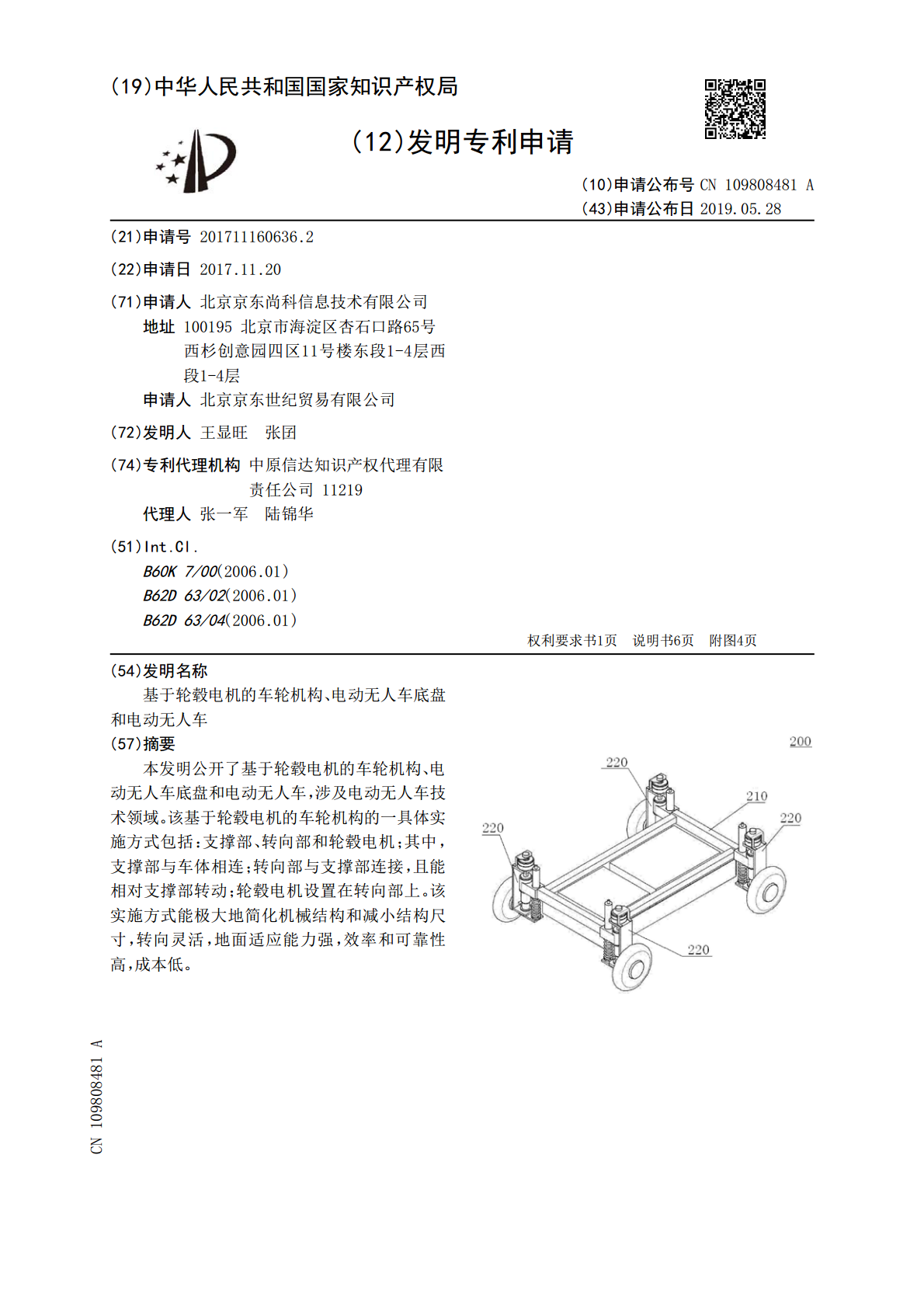
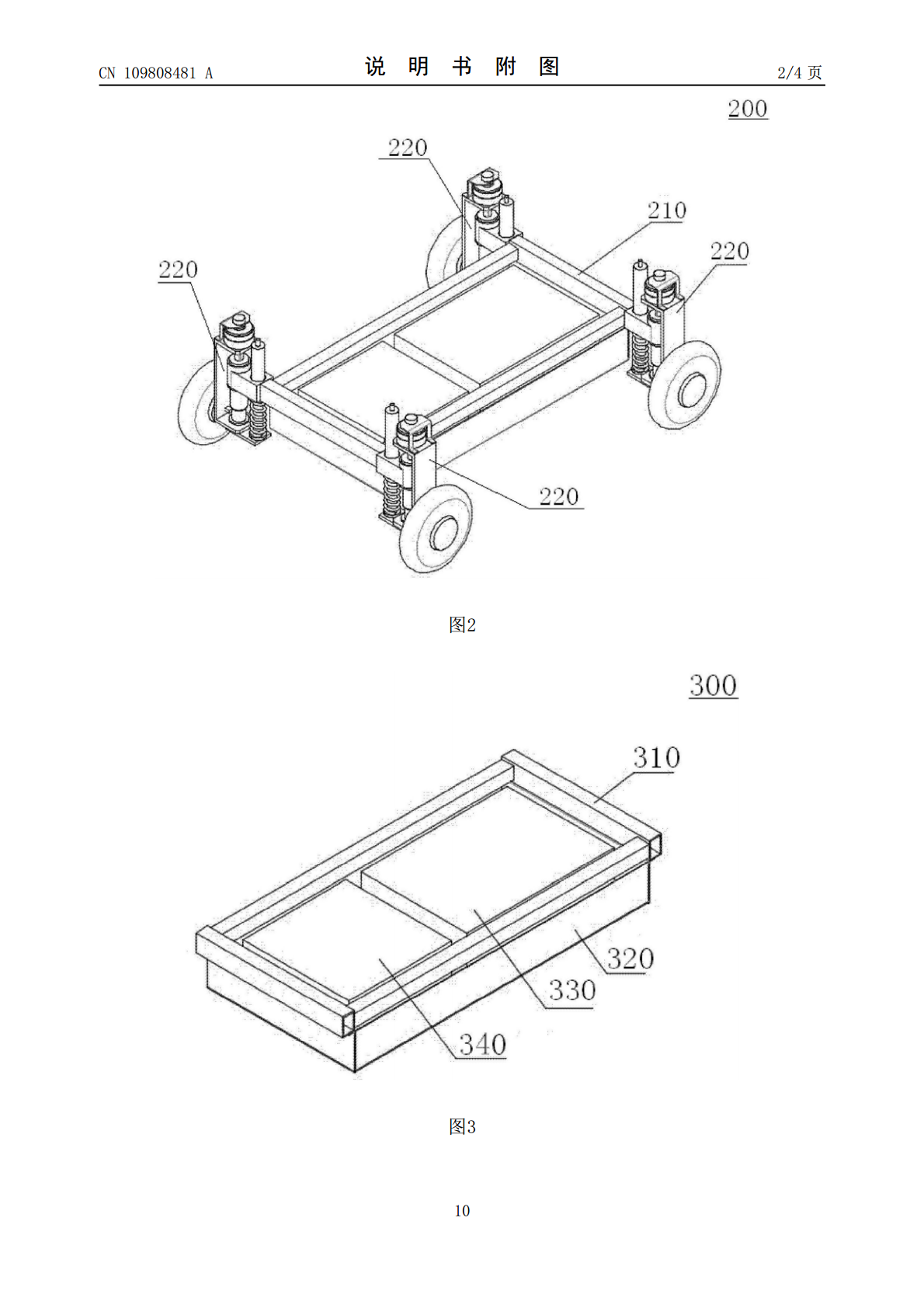
本发明公开了基于轮毂电机的车轮机构、电动无人车底盘和电动无人车,涉及电动无人车技术领域。该基于轮毂电机的车轮机构的一具体实施方式包括:支撑部、转向部和轮毂电机;其中,支撑部与车体相连;转向部与支撑部连接,且能相对支撑部转动;轮毂电机设置在转向部上。该实施方式能极大地简化机械结构和减小结构尺寸,转向灵活,地面适应能力强,效率和可靠性高,成本低。
电动车变速驱动电机、电动车轮毂电机和电机控制方法.pdf
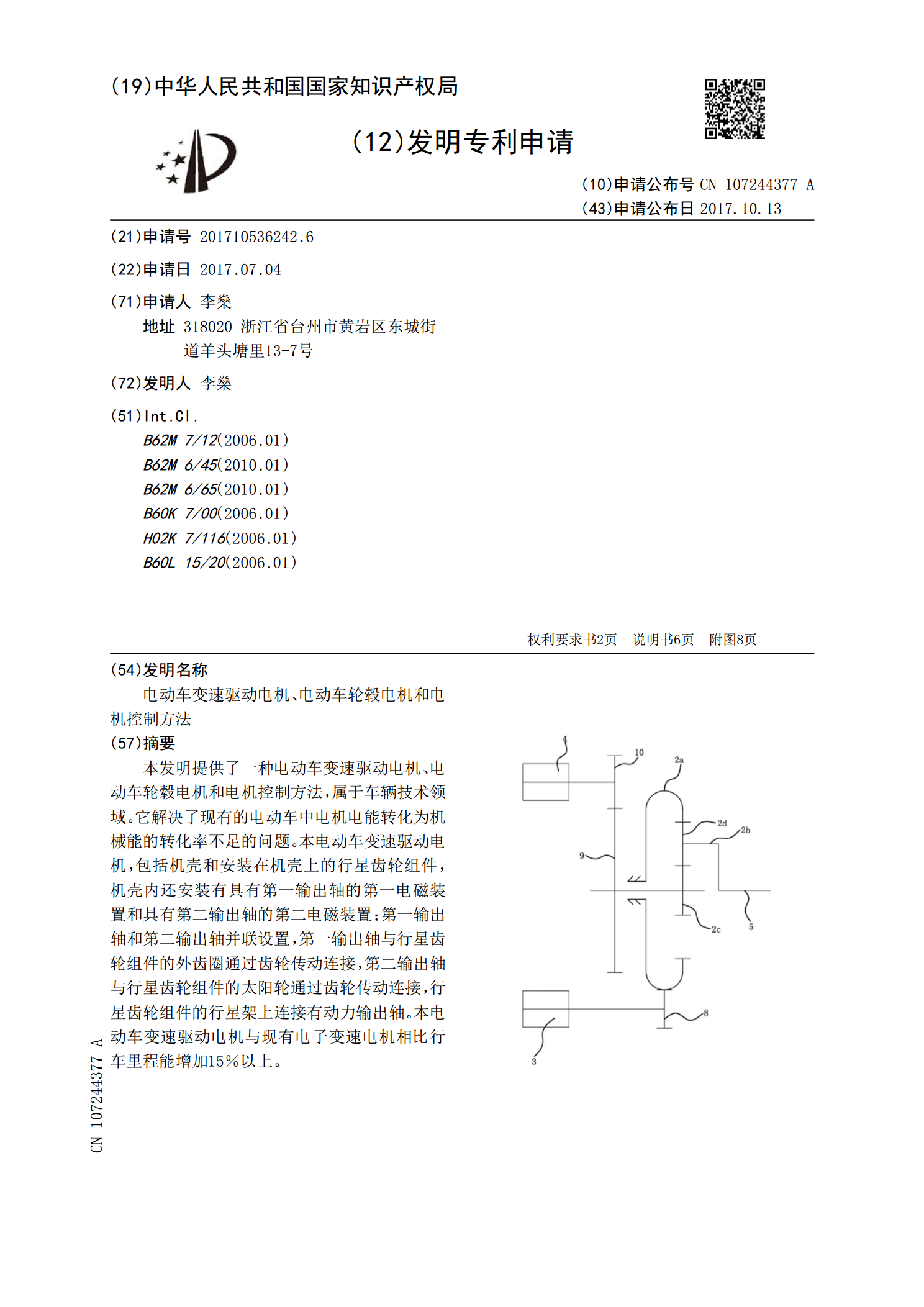
本发明提供了一种电动车变速驱动电机、电动车轮毂电机和电机控制方法,属于车辆技术领域。它解决了现有的电动车中电机电能转化为机械能的转化率不足的问题。本电动车变速驱动电机,包括机壳和安装在机壳上的行星齿轮组件,机壳内还安装有具有第一输出轴的第一电磁装置和具有第二输出轴的第二电磁装置;第一输出轴和第二输出轴并联设置,第一输出轴与行星齿轮组件的外齿圈通过齿轮传动连接,第二输出轴与行星齿轮组件的太阳轮通过齿轮传动连接,行星齿轮组件的行星架上连接有动力输出轴。本电动车变速驱动电机与现有电子变速电机相比行车里程能增加1

无人车底盘及无人车.pdf
本申请一种无人车底盘及无人车,所述无人车包括车身及底盘。所述底盘包括底盘支架、与所述底盘支架配合的前轮组件、中轮组件和后轮组件以及驱动所述无人车底盘移动的驱动单元,与所述底盘支架连接的摇臂和控制摇臂运动的驱动机构,后轮组件安装在摇臂上并通过所述摇臂与所述底盘支架连接;摇臂的旋转中心与中轮组件同轴。本申请将无人车底盘上的中轮组件与后轮组件通过可旋转的摇臂连接并且使摇臂的转轴与中轮组件同轴,使无人车在高机动运行模式下,只需要摇臂电机提供很小的输出力矩保持摇臂系统姿态即可,大大降低无人车运动系统的功率需求。
底盘车电动操作机构.pdf
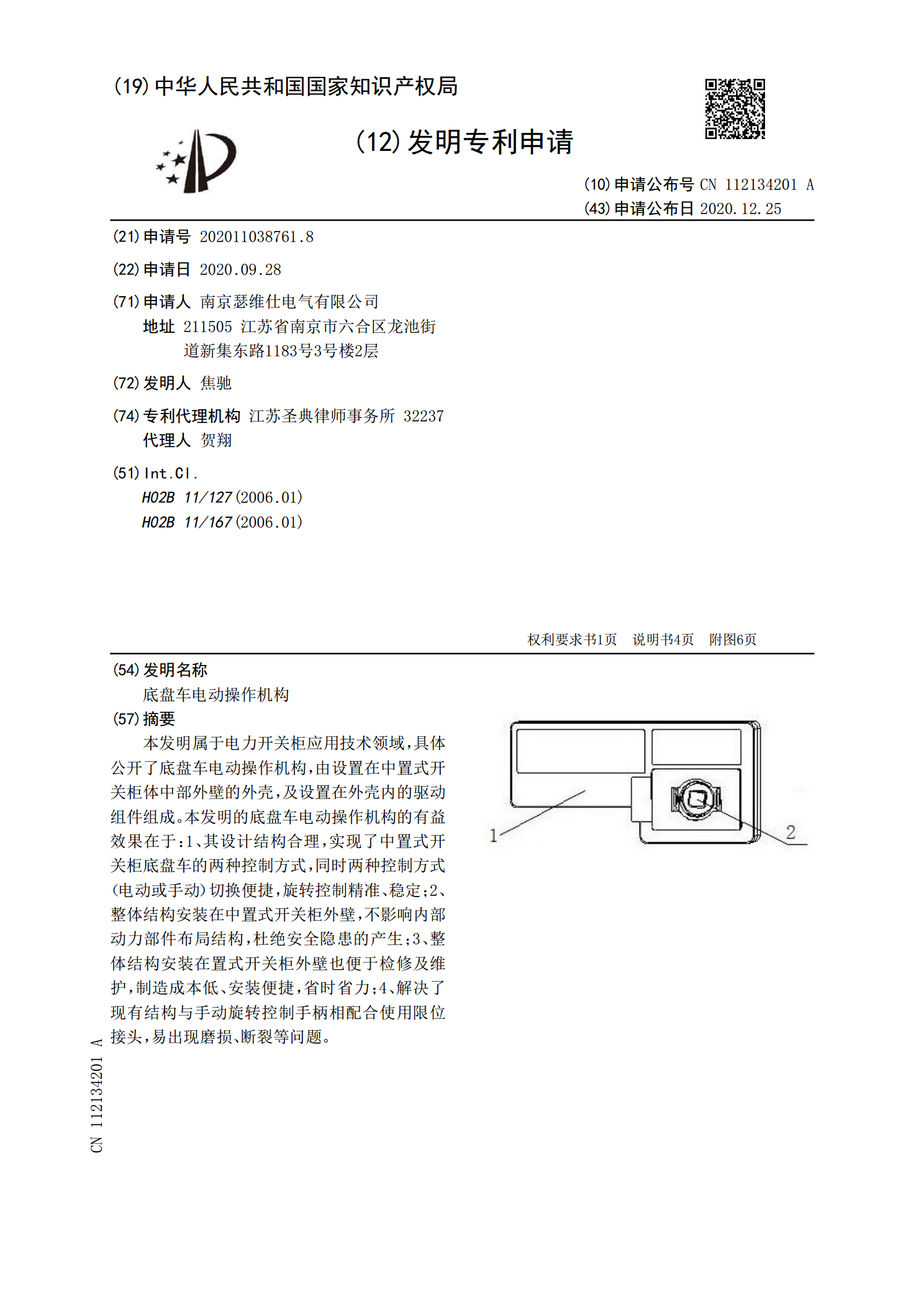
本发明属于电力开关柜应用技术领域,具体公开了底盘车电动操作机构,由设置在中置式开关柜体中部外壁的外壳,及设置在外壳内的驱动组件组成。本发明的底盘车电动操作机构的有益效果在于:1、其设计结构合理,实现了中置式开关柜底盘车的两种控制方式,同时两种控制方式(电动或手动)切换便捷,旋转控制精准、稳定;2、整体结构安装在中置式开关柜外壁,不影响内部动力部件布局结构,杜绝安全隐患的产生;3、整体结构安装在置式开关柜外壁也便于检修及维护,制造成本低、安装便捷,省时省力;4、解决了现有结构与手动旋转控制手柄相配合使用限位
电动车轮毂电机和电动车轮毂电机控制方法.pdf
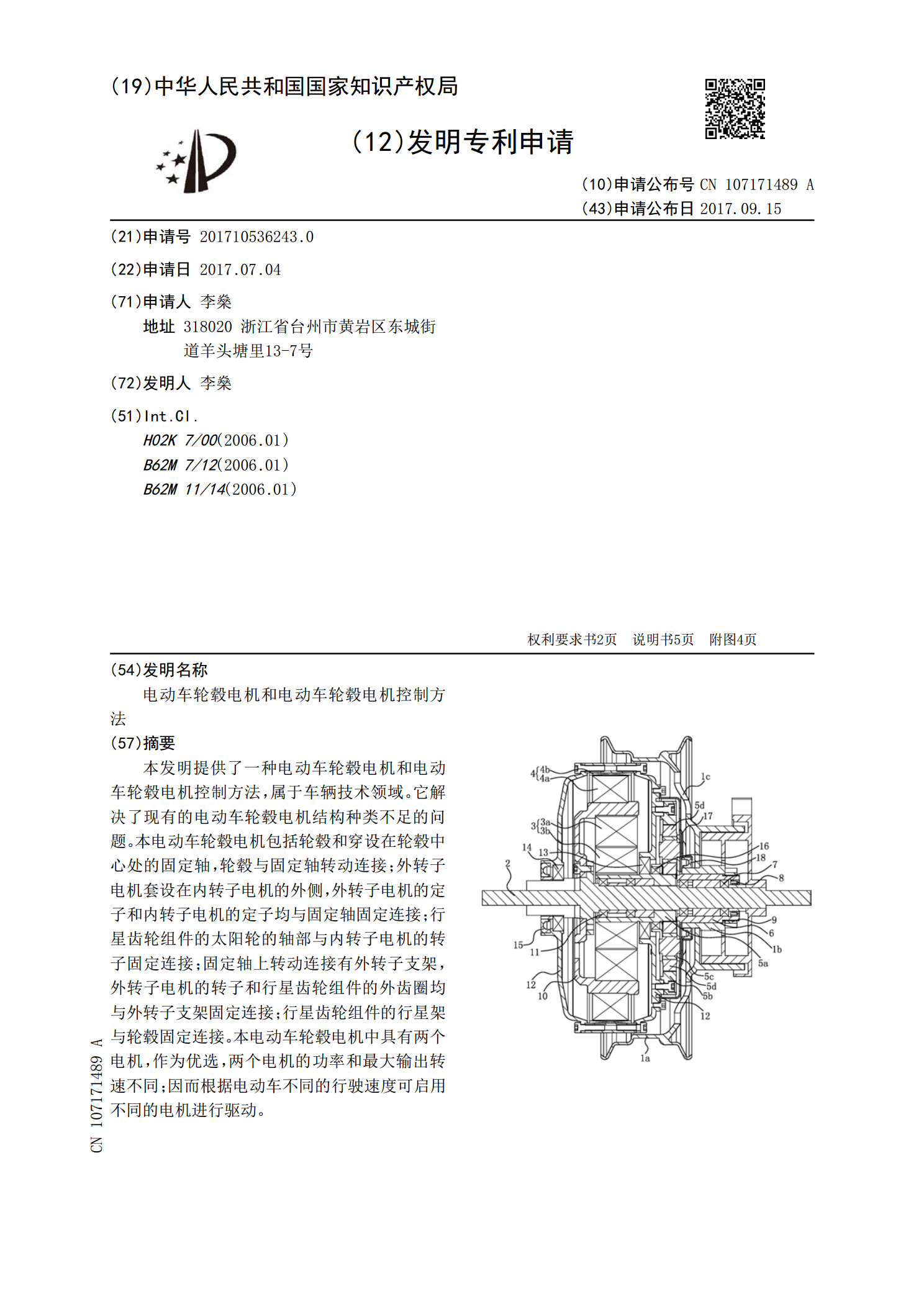
本发明提供了一种电动车轮毂电机和电动车轮毂电机控制方法,属于车辆技术领域。它解决了现有的电动车轮毂电机结构种类不足的问题。本电动车轮毂电机包括轮毂和穿设在轮毂中心处的固定轴,轮毂与固定轴转动连接;外转子电机套设在内转子电机的外侧,外转子电机的定子和内转子电机的定子均与固定轴固定连接;行星齿轮组件的太阳轮的轴部与内转子电机的转子固定连接;固定轴上转动连接有外转子支架,外转子电机的转子和行星齿轮组件的外齿圈均与外转子支架固定连接;行星齿轮组件的行星架与轮毂固定连接。本电动车轮毂电机中具有两个电机,作为优选,两