
防止车辆弯道侧翻的控制系统及控制方法.pdf

努力****晓骞

1/10
2/10

3/10
4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
防止车辆弯道侧翻的控制系统及控制方法.pdf
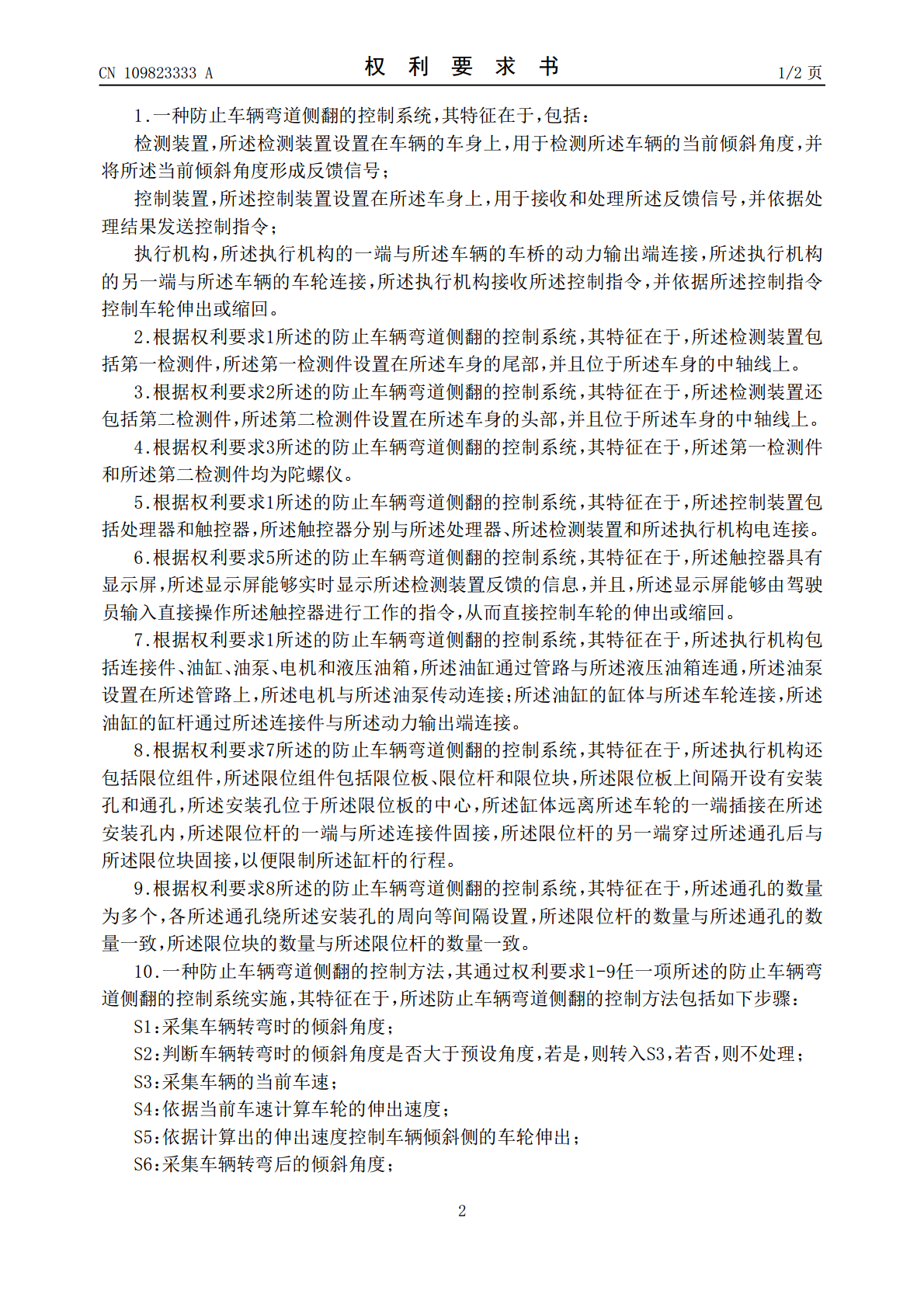
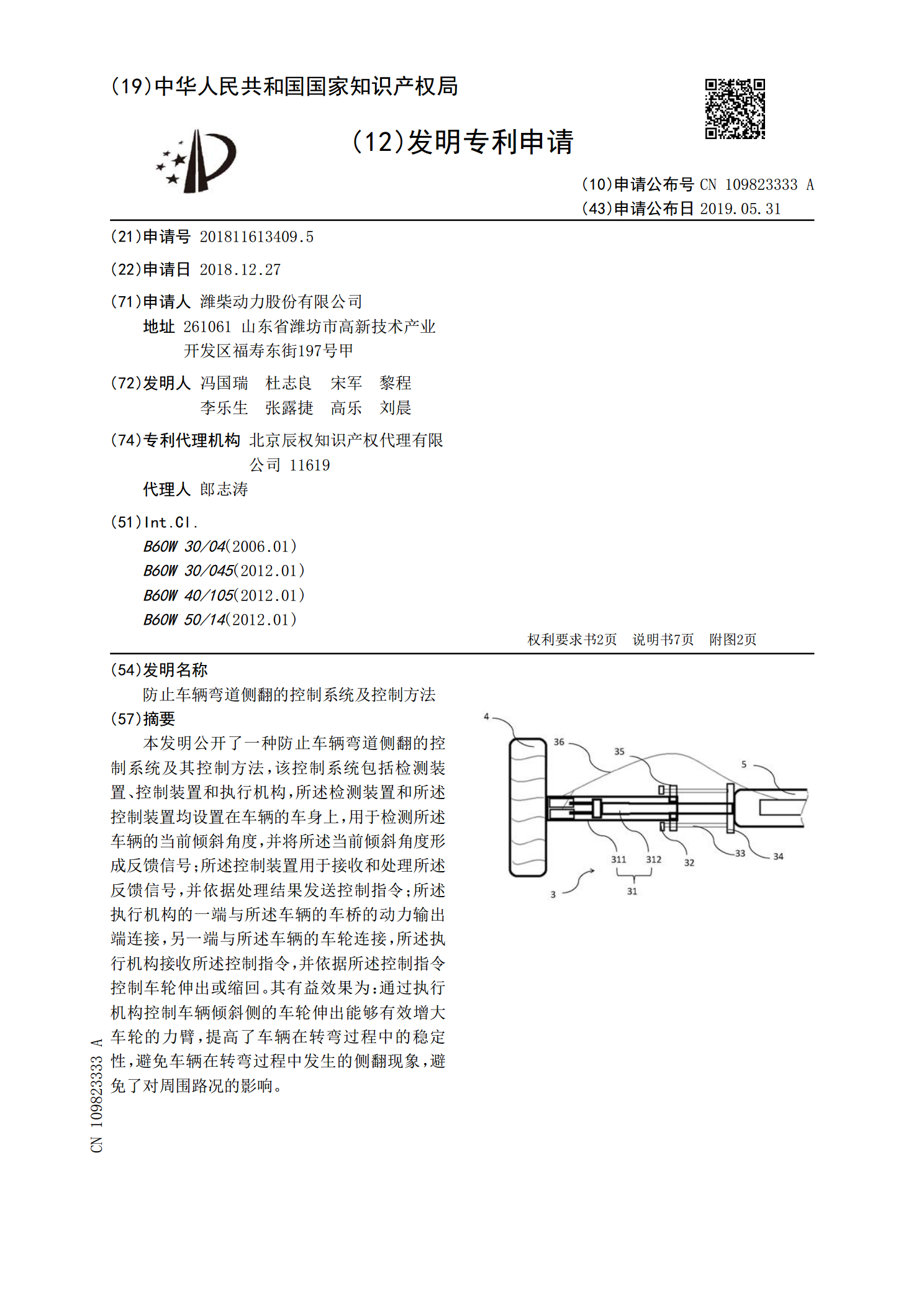
本发明公开了一种防止车辆弯道侧翻的控制系统及其控制方法,该控制系统包括检测装置、控制装置和执行机构,所述检测装置和所述控制装置均设置在车辆的车身上,用于检测所述车辆的当前倾斜角度,并将所述当前倾斜角度形成反馈信号;所述控制装置用于接收和处理所述反馈信号,并依据处理结果发送控制指令;所述执行机构的一端与所述车辆的车桥的动力输出端连接,另一端与所述车辆的车轮连接,所述执行机构接收所述控制指令,并依据所述控制指令控制车轮伸出或缩回。其有益效果为:通过执行机构控制车辆倾斜侧的车轮伸出能够有效增大车轮的力臂,提高了

防止车辆侧翻的控制方法和装置.pdf
本发明实施例公开了一种防止车辆侧翻的控制方法和装置。所述方法包括:实时获取车辆的倾斜数据;判断所述倾斜数据是否满足预设的第一侧翻条件;当所述倾斜数据满足预设的第一侧翻条件时,根据所述倾斜数据确定用于控制车辆的转向信息;通过发送所述转向信息控制车辆转向。所述装置对应包括:数据获取模块、判断模块、信息确定模块和转向控制模块。采用本发明实施例所提供的防止车辆侧翻的控制方法和装置,当车辆在行车过程中有侧翻倾向时,不需要驾驶员及时准确地判断和补救操作,而是自动进行相应的转向控制,以避免侧翻事故的发生。
一种车辆防侧翻控制系统和防侧翻控制方法.pdf
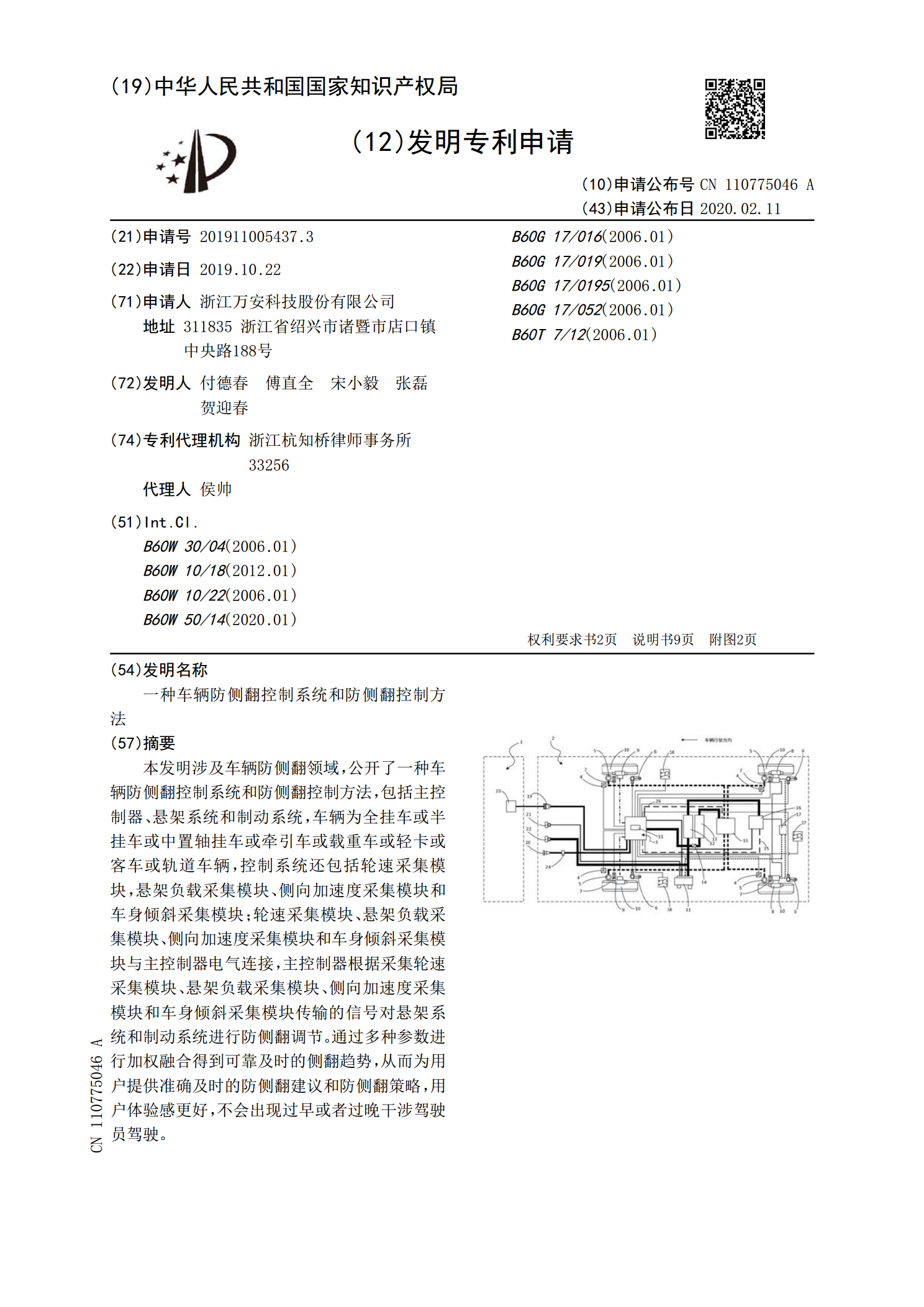
本发明涉及车辆防侧翻领域,公开了一种车辆防侧翻控制系统和防侧翻控制方法,包括主控制器、悬架系统和制动系统,车辆为全挂车或半挂车或中置轴挂车或牵引车或载重车或轻卡或客车或轨道车辆,控制系统还包括轮速采集模块,悬架负载采集模块、侧向加速度采集模块和车身倾斜采集模块;轮速采集模块、悬架负载采集模块、侧向加速度采集模块和车身倾斜采集模块与主控制器电气连接,主控制器根据采集轮速采集模块、悬架负载采集模块、侧向加速度采集模块和车身倾斜采集模块传输的信号对悬架系统和制动系统进行防侧翻调节。通过多种参数进行加权融合得到可

车辆弯道行驶侧倾稳定性分析与侧翻预警研究.docx
车辆弯道行驶侧倾稳定性分析与侧翻预警研究车辆弯道行驶侧倾稳定性分析与侧翻预警研究摘要:随着交通工具的普及,车辆在弯道行驶过程中的侧倾稳定性问题越来越引起人们的关注。本文通过对车辆侧倾稳定性的分析与研究,结合侧翻预警系统的设计与研究,旨在提高车辆在弯道行驶时的稳定性和安全性。本文涉及的研究内容包括车辆侧倾现象的成因分析、车辆侧倾稳定性分析、侧倾预警系统的设计与研究等。一、引言随着快速城市化和交通工具的普及,车辆在弯道行驶过程中的侧倾问题越来越引起人们的关注。侧倾不仅会影响车辆的稳定性和驾驶者的舒适性,还会对

车辆侧翻预警的方法和装置.pdf
本申请提供一种车辆侧翻预警的方法和装置,包括:步骤A:连接车辆的OBD接口,从OBD接口采集的数据中获取车辆方向盘转向角与车辆4个车轮的轮速;步骤B:计算车速VS;计算车辆的转弯角;步骤C:当车辆的转弯角≤±5°时,计算参考轮速比C=V