
车辆侧翻预警的方法和装置.pdf

一只****签网

1/10

2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

车辆侧翻预警的方法和装置.pdf
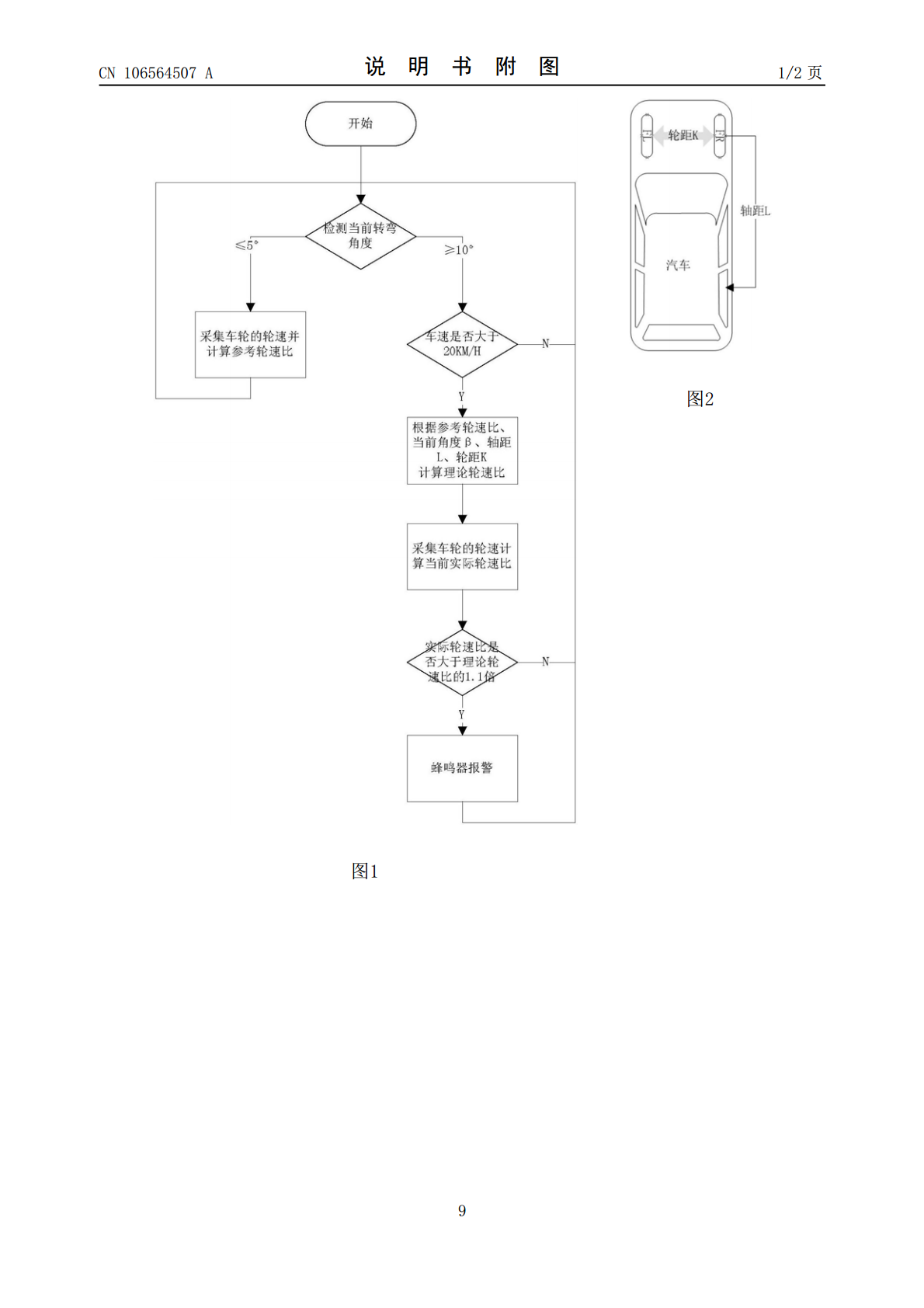
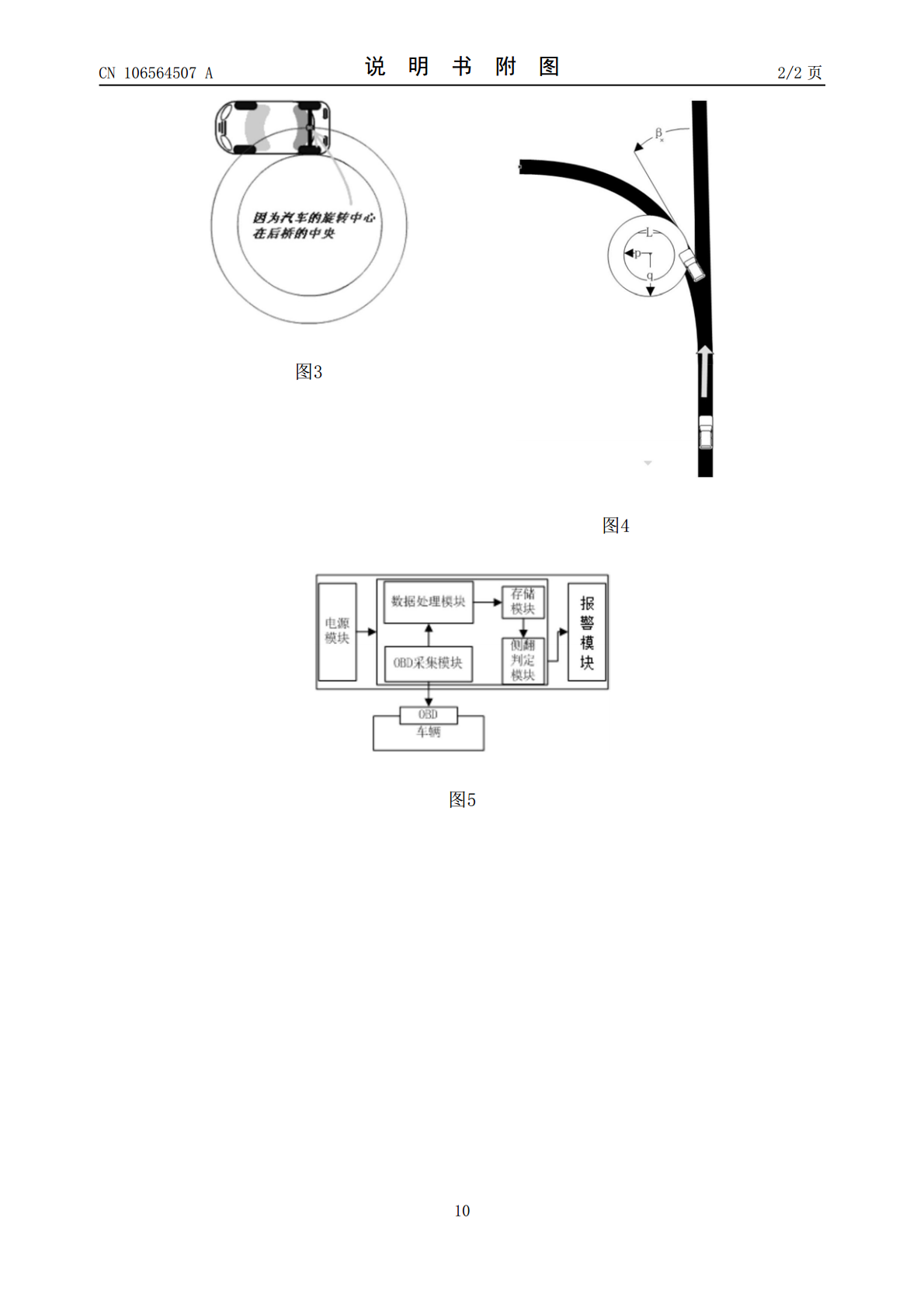
本申请提供一种车辆侧翻预警的方法和装置,包括:步骤A:连接车辆的OBD接口,从OBD接口采集的数据中获取车辆方向盘转向角与车辆4个车轮的轮速;步骤B:计算车速VS;计算车辆的转弯角;步骤C:当车辆的转弯角≤±5°时,计算参考轮速比C=V

一种实时预警车辆侧翻的方法和装置.pdf
本发明公开了一种实时预警车辆侧翻的方法和装置,利用传感器检测在行驶过程中车辆的轮胎胎压和侧向加速度,传感器将检测到的数据发送至微处理单元中,微处理单元将轮胎胎压值和侧向加速度值分别与它们的预设阈值进行比较,当它们大于预设阈值时,处理器将控制报警装置进行报警。本发明采用检测车辆在行驶过程中车辆的轮胎胎压值和侧向加速度值,并将检测数据通过处理器进行比较,对大于预设阈值的情况进行报警;采用侧向加速度对轮胎胎压进行修正,防止车辆实际行驶情况下的类似情况对轮胎胎压判断指标的干扰而造成的误报警和过早报警。

防止车辆侧翻的控制方法和装置.pdf
本发明实施例公开了一种防止车辆侧翻的控制方法和装置。所述方法包括:实时获取车辆的倾斜数据;判断所述倾斜数据是否满足预设的第一侧翻条件;当所述倾斜数据满足预设的第一侧翻条件时,根据所述倾斜数据确定用于控制车辆的转向信息;通过发送所述转向信息控制车辆转向。所述装置对应包括:数据获取模块、判断模块、信息确定模块和转向控制模块。采用本发明实施例所提供的防止车辆侧翻的控制方法和装置,当车辆在行车过程中有侧翻倾向时,不需要驾驶员及时准确地判断和补救操作,而是自动进行相应的转向控制,以避免侧翻事故的发生。

一种基于重力球装置的车辆侧翻预警装置及方法.pdf
本发明公开了一种汽车绊倒性侧翻的预警装置以及方法。重力球装置用球铰固定在汽车重心处,球铰支撑座起固定支撑作用。当汽车单个车轮碰到障碍物致使汽车发生侧偏时,重力球带动连杆和电阻器滑杆转动使滑线电阻阻值发生变化,此时电压信号采集装置采集产生变化的电压信号,当这个电压信号超过设计的电压阈值时,侧翻预警装置中的控制单元把信号输出给控制电路,点亮发光二极管,蜂鸣器发出警报,提醒驾驶员安全操作,降低汽车侧翻风险,从而实现侧翻预警功能。
一种货车侧翻预警装置及方法.pdf
本发明提供的是一种货车侧翻预警的装置及方法,通过对车辆实际重心高度、重心水平位置、整车重心侧向偏移、行车速度的分析,得出前转向轮转角阈值,对比驾驶员操作的方向盘转角,控制单元通过实际方向盘转角与前转向轮转角阈值的比较得到风险状态预估值R,当风险状态预估值R超出安全范围时,控制单元发出信号,蜂鸣器会发出警报声,提醒驾驶员安全操作,降低货车侧翻风险,提高驾驶安全性。