
用于电机驱动车辆的控制方法和控制系统.pdf

安双****文章


1/10
2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于电机驱动车辆的控制方法和控制系统.pdf
本公开提供了一种用于电机驱动车辆的控制方法。该方法包括:通过车轮的速度之间的差或者车轮的速度之间的差的变化率来计算驱动电机的校正扭矩以及将所计算的校正扭矩与驱动电机的当前所需扭矩进行比较。当所计算的校正扭矩大于当前所需扭矩时,基于当前所需扭矩来操作驱动电机。当所计算的校正扭矩小于或等于当前所需扭矩时,基于所计算的校正扭矩来操作驱动电机,或者将驱动电机的所需扭矩校正为对应于所计算的校正扭矩并且基于校正后的驱动电机的所需扭矩来操作驱动电机。
电机驱动车辆的换挡控制方法和控制系统.pdf
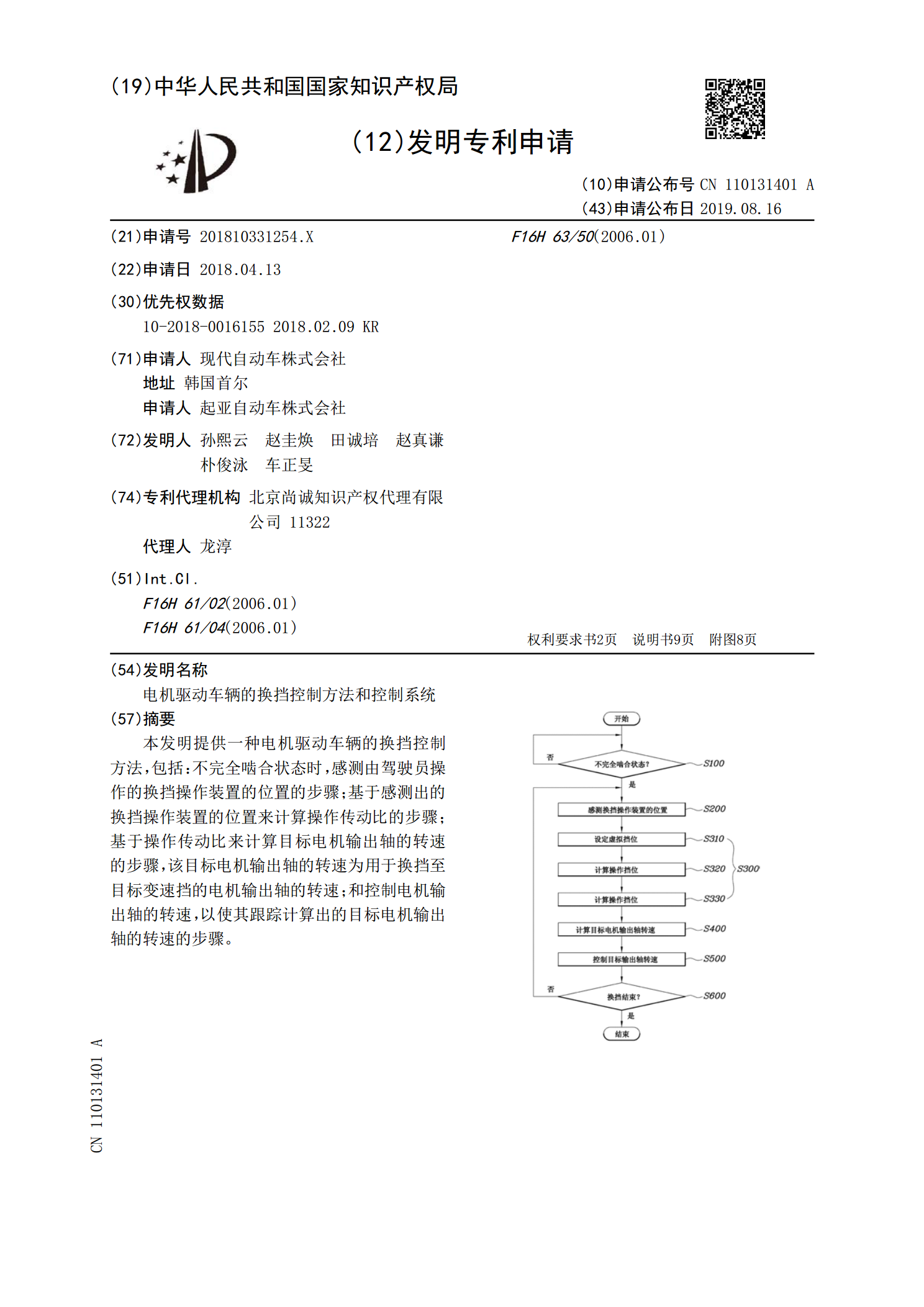
本发明提供一种电机驱动车辆的换挡控制方法,包括:不完全啮合状态时,感测由驾驶员操作的换挡操作装置的位置的步骤;基于感测出的换挡操作装置的位置来计算操作传动比的步骤;基于操作传动比来计算目标电机输出轴的转速的步骤,该目标电机输出轴的转速为用于换挡至目标变速挡的电机输出轴的转速;和控制电机输出轴的转速,以使其跟踪计算出的目标电机输出轴的转速的步骤。

用于电驱动车辆的制动控制系统和方法.pdf
在再生协调制动期间,通过消除制动系统部件的公差的影响来限定目标制动力从而实现舒服的制动感受和稳定的再生能量。制动控制系统包括主缸、轮缸、VDC制动液压单元和电动机控制器。响应于驾驶员的制动踏板操作,制动踏板冲程位置被检测到,在该位置处,主缸中的压力实际上开始被产生。目标减速度特性被调节偏离理论特性,使得目标减速度等于测得制动踏板冲程位置处的增加制动力的最大值(即,再生制动间隙)。
用于车辆的驱动控制系统.pdf
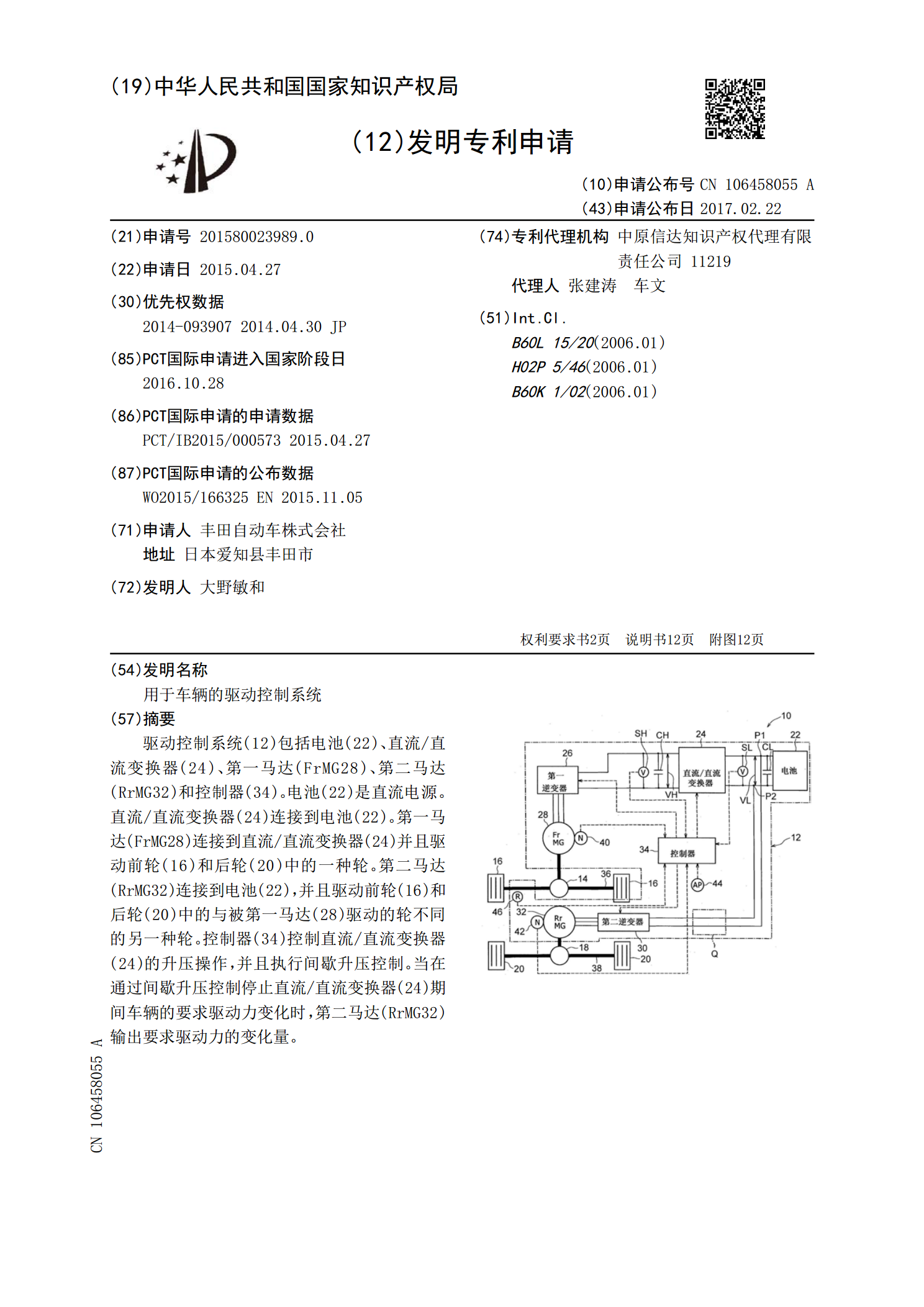
驱动控制系统(12)包括电池(22)、直流/直流变换器(24)、第一马达(FrMG28)、第二马达(RrMG32)和控制器(34)。电池(22)是直流电源。直流/直流变换器(24)连接到电池(22)。第一马达(FrMG28)连接到直流/直流变换器(24)并且驱动前轮(16)和后轮(20)中的一种轮。第二马达(RrMG32)连接到电池(22),并且驱动前轮(16)和后轮(20)中的与被第一马达(28)驱动的轮不同的另一种轮。控制器(34)控制直流/直流变换器(24)的升压操作,并且执行间歇升压控制。当在通过

用于驱动电机馈电的控制方法、装置及车辆.pdf
本申请公开了一种用于驱动电机馈电的控制方法、装置及车辆,其中,方法包括:检测车辆的驱动电机的当前模式;在检测到驱动电机的当前模式为馈电模式时,采集驱动电机的实际温度,并根据过温故障的最低温度和急速工况下的电机温升值计算馈电模式的最高容许温度;根据实际温度和最高容许温度之间的差值确定驱动电机的目标馈电扭矩,并以目标馈电扭矩控制驱动电机馈电。由此,解决了相关技术中馈电工况下采用最大馈电扭矩馈电,在切换为大功率用电工况时容易出现过温故障,降低车辆的动力性能,用户体验较差等问题。