
一种水面捕捞机器人.pdf

英瑞****写意

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种水面捕捞机器人.pdf
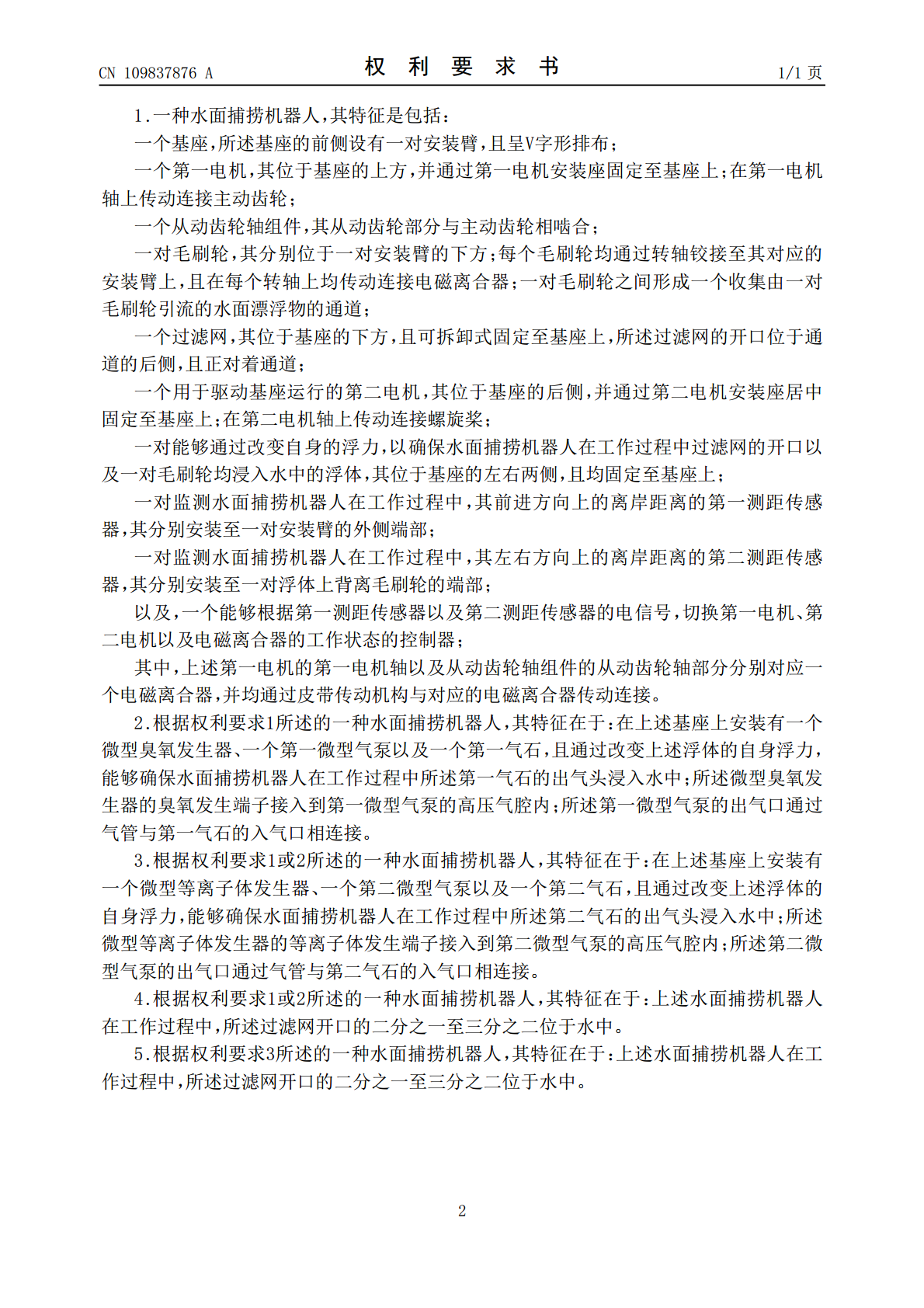
本发明公开了一种水面清理设备,特别是一种水面捕捞机器人,其结构中第一测距传感器监测水面捕捞机器人前进方向上的离岸距离,而第二测距传感器则监测左右方向上的离岸距离;第一电机驱动一对毛刷轮沿不同方向旋转,通过控制一对电磁离合器能够实现任意一个毛刷轮单独旋转;第二电机驱动水面捕捞机器人前后运行;控制器根据第一测距传感器以及第二测距传感器的电信号,判断及确定水面捕捞机器人的前进方向上以及左右方向上的各自离岸距离,切换第一电机、第二电机以及电磁离合器的工作状态,能够自动调整水面捕捞机器人的运行状态及路径。其解决了“
一种水面捕捞机器人.pdf
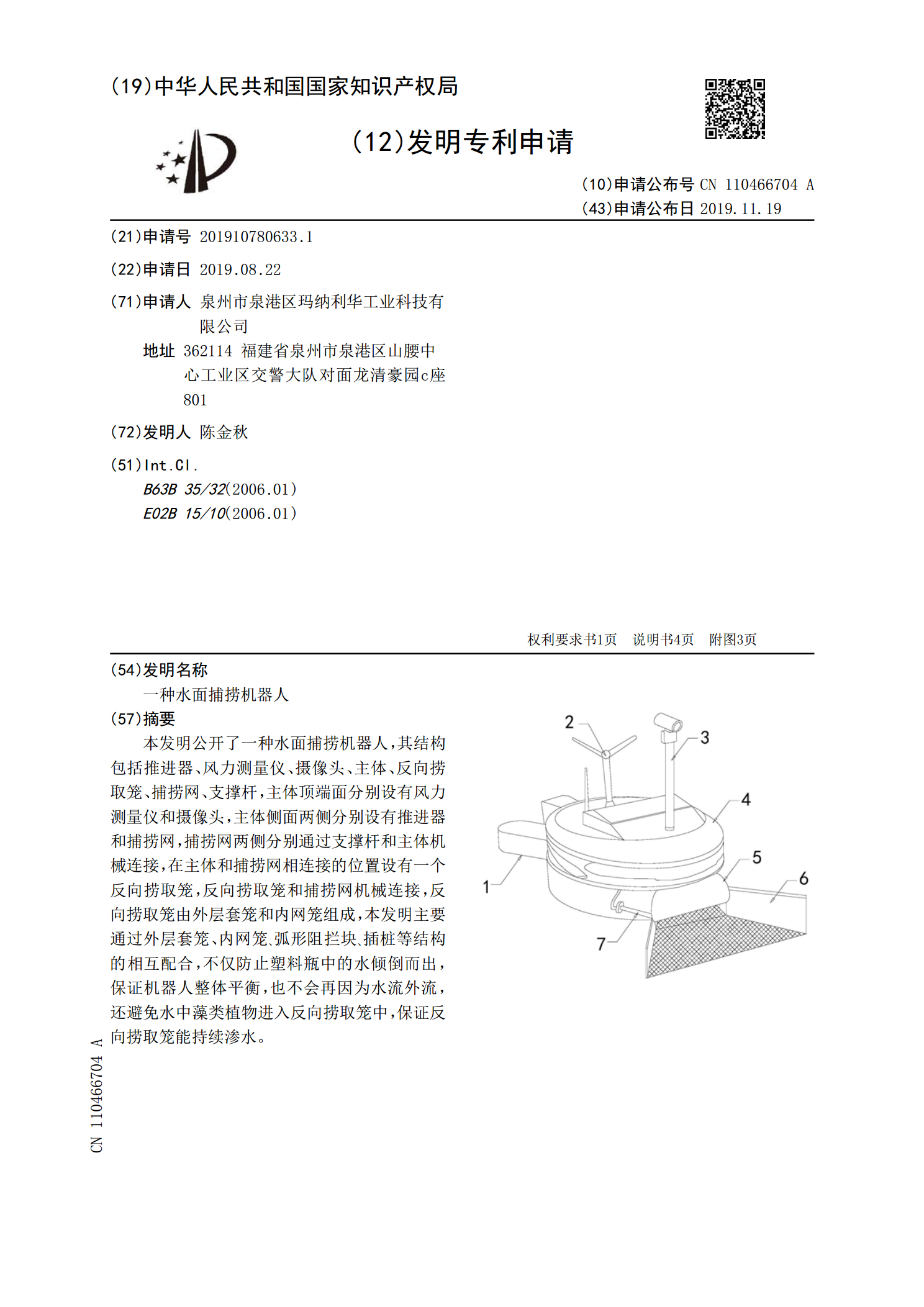
本发明公开了一种水面捕捞机器人,其结构包括推进器、风力测量仪、摄像头、主体、反向捞取笼、捕捞网、支撑杆,主体顶端面分别设有风力测量仪和摄像头,主体侧面两侧分别设有推进器和捕捞网,捕捞网两侧分别通过支撑杆和主体机械连接,在主体和捕捞网相连接的位置设有一个反向捞取笼,反向捞取笼和捕捞网机械连接,反向捞取笼由外层套笼和内网笼组成,本发明主要通过外层套笼、内网笼

一种水面垃圾捕捞机器人.pdf
本发明公开了一种水面垃圾捕捞机器人,包括船体,所述船体一侧固定设有控制器与红外线感应器,所述船体上设有储物箱,所述储物箱内设有导料杆,所述导料杆一侧设有挡板,所述挡板上设有活动轴一,所述活动轴一上套设有U型夹板,所述U型夹板内贯穿设有捕捞装置,所述U型夹板一侧设有弧形块,所述弧形块上设有活动轴二,所述活动轴二上套设有连接板,所述连接板远离所述活动轴二一端通过活动轴三与所述储物箱内壁相连接,所述导料杆一端连接设有活动杆,所述活动杆远离所述导料杆一端设有套筒,所述套筒套设在限位柱上,所述限位柱固定在圆盘上。有

一种水面捕捞机器人及使用方法.pdf
本发明公开了一种水面捕捞机器人及使用方法及使用方法,其结构包括推进器、风力测量仪、摄像头、主体、反向捞取笼、捕捞网、支撑杆,主体顶端面分别设有风力测量仪和摄像头,主体侧面两侧分别设有推进器和捕捞网,捕捞网两侧分别通过支撑杆和主体机械连接,在主体和捕捞网相连接的位置设有一个反向捞取笼,反向捞取笼和捕捞网机械连接,反向捞取笼由外层套笼和内网笼组成,本发明主要通过外层套笼、内网笼

一种大水面捕捞装置.pdf
本实用新型涉及水产养殖技术领域,公开了一种大水面捕捞装置,包括捕捞网,其特征在于,还包括位于捕捞网中的用于吸引鱼群的增氧机、用于维持鱼鲜活且对鱼的体型大小进行分选的活水船,捕捞网整体呈长方体形,捕捞网的顶部开口,捕捞网的一侧开设有出鱼口,出鱼口上固定有圆柱形的出鱼网,活水船包括用于放置鱼的活水船舱,活水船舱内设有增氧机,活水船舱的一端固定连接有一向外部延伸的进鱼管,出鱼网固定在进鱼管上,活水船舱内设有多组隔栅,隔栅包括竖向设置的多根不锈钢圆管。本实用新型具有减少对捕获的鲜活鱼体表面造成损伤、根据鱼体型大小