
轨道异物检测方法及装置.pdf

文宣****66

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轨道异物检测方法及装置.pdf
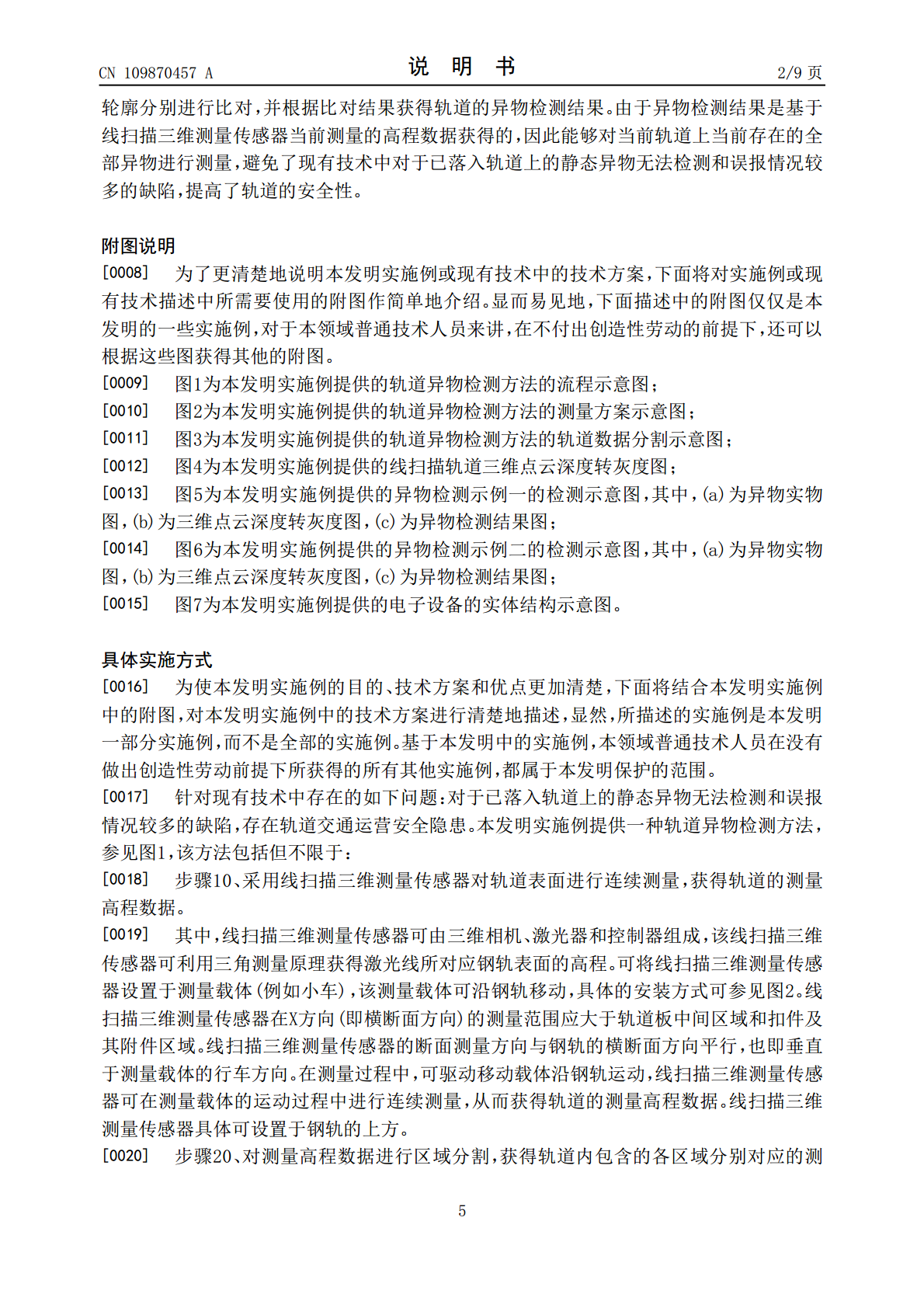
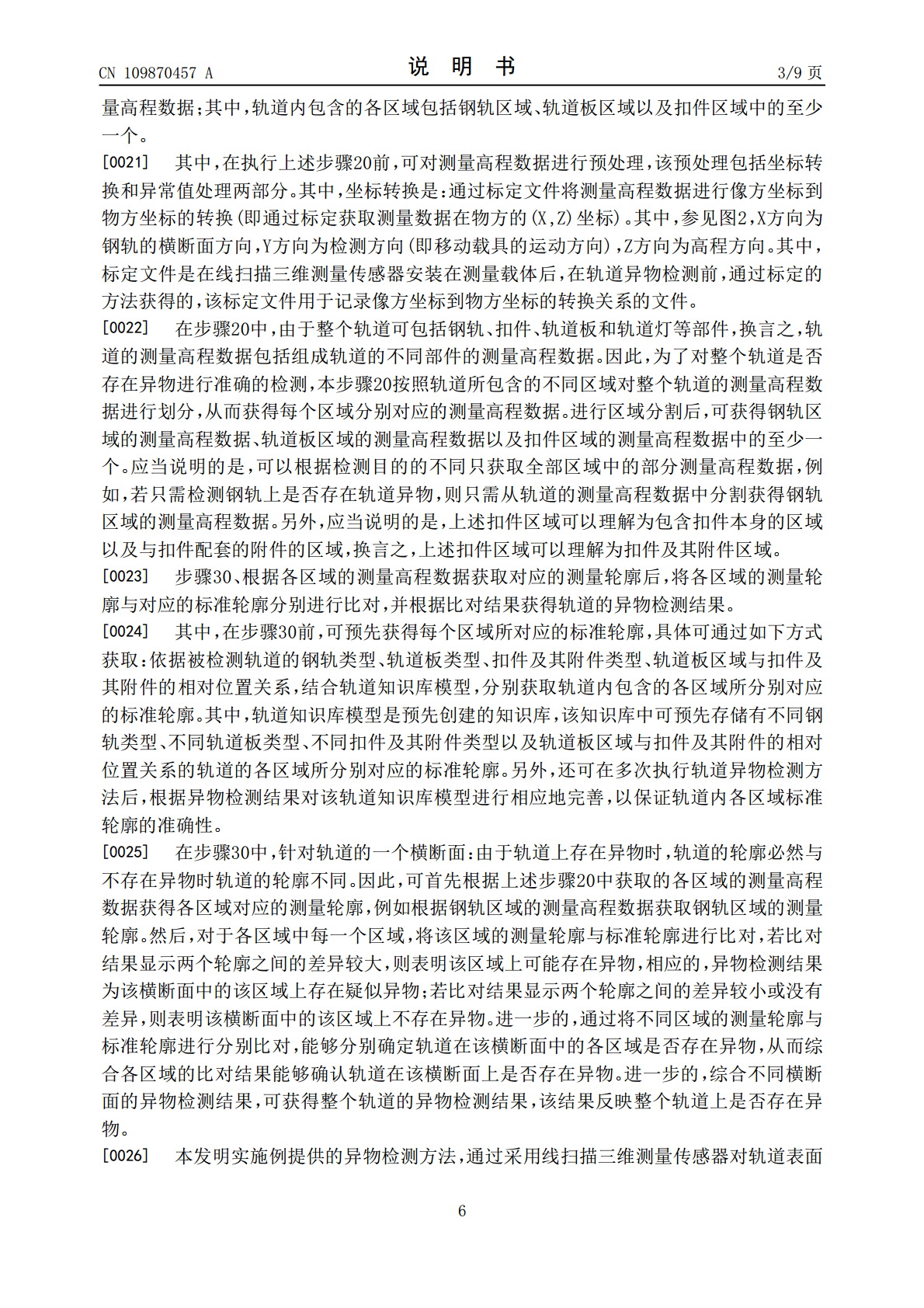
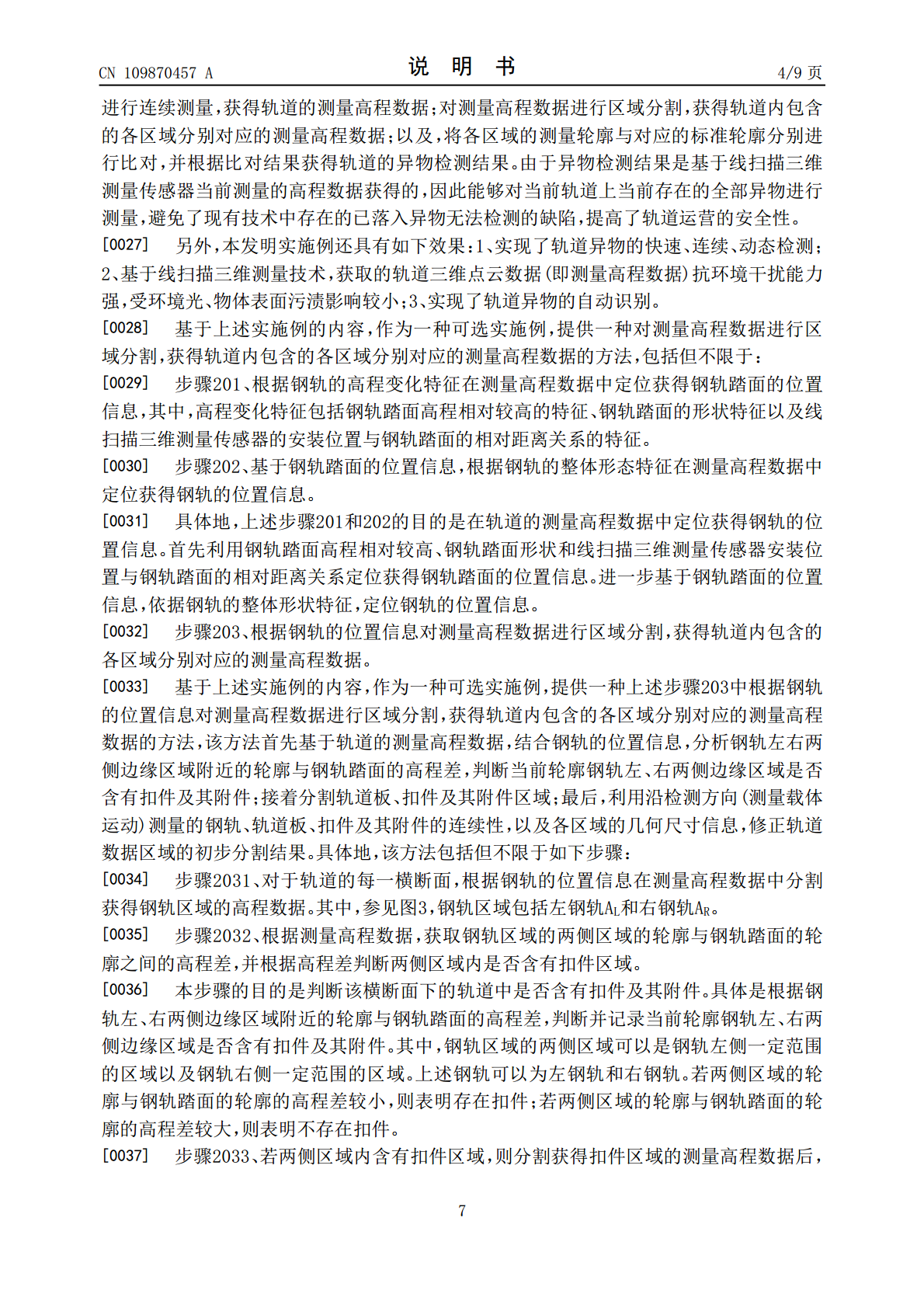
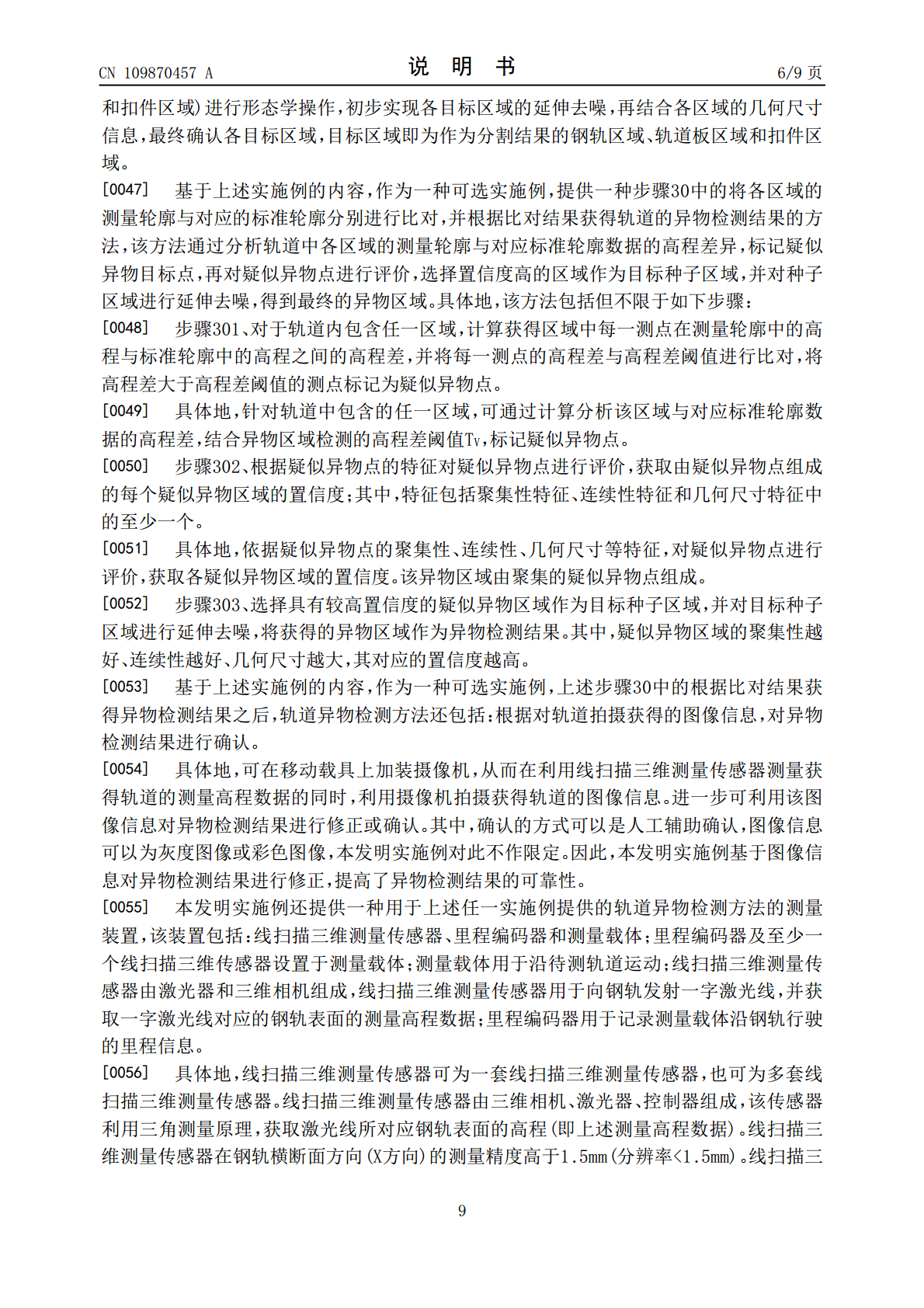
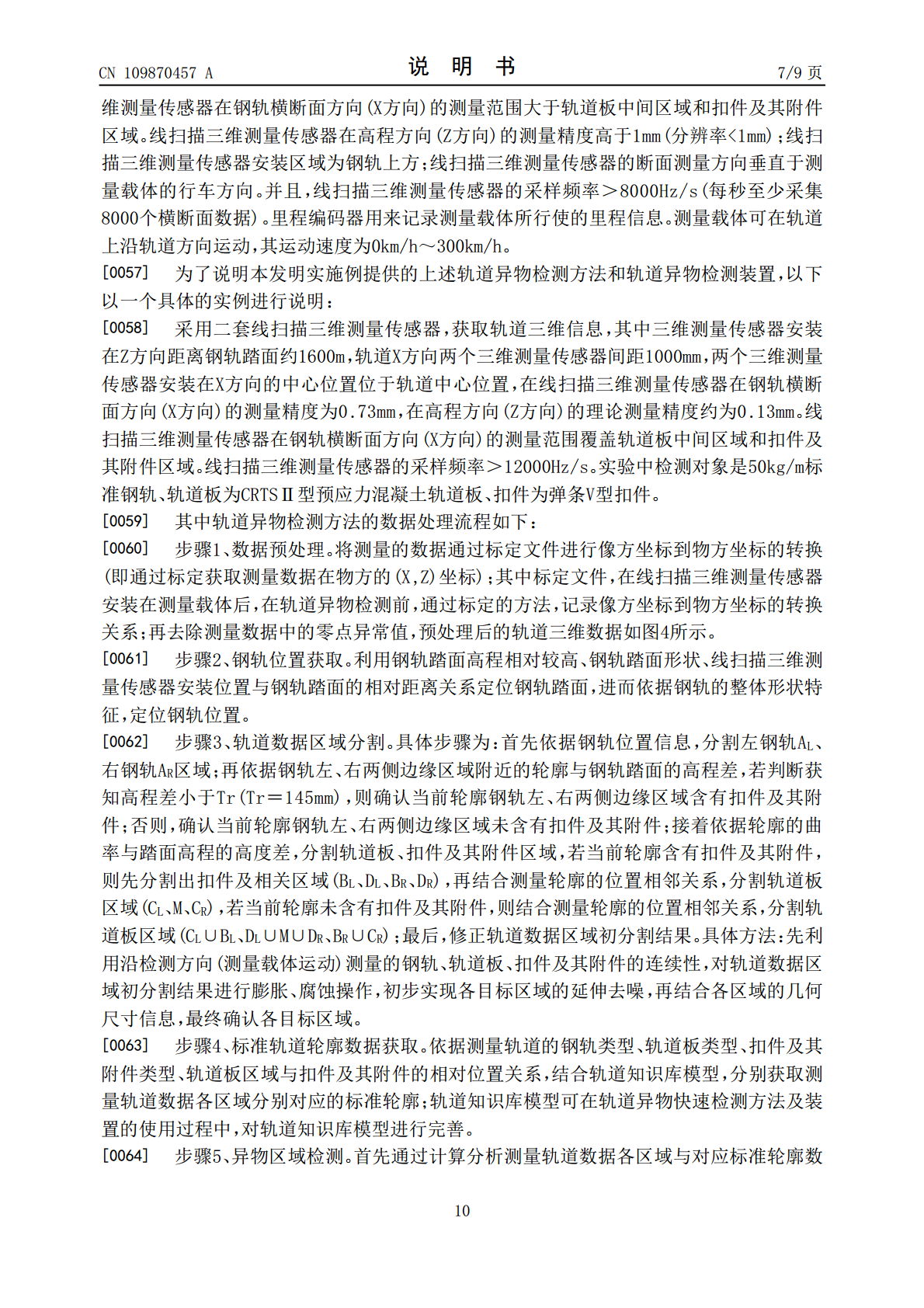
本发明实施例提供一种轨道异物检测方法及装置,该方法包括:采用线扫描三维测量传感器对轨道表面进行连续测量,获得轨道的测量高程数据;对测量高程数据进行区域分割,获得轨道内包含的各区域分别对应的测量高程数据;根据各区域的测量高程数据获取对应的测量轮廓后,将各区域的测量轮廓与对应的标准轮廓分别进行比对,并根据比对结果获得轨道的异物检测结果。本发明实施例能够对当前轨道上当前存在的全部异物进行测量,避免了现有技术中存在的对于已落入轨道上的静态异物无法检测和误报情况较多的缺陷;另外,本发明实施例具备检测效率高的特点,可
异物检测装置和异物检测方法.pdf
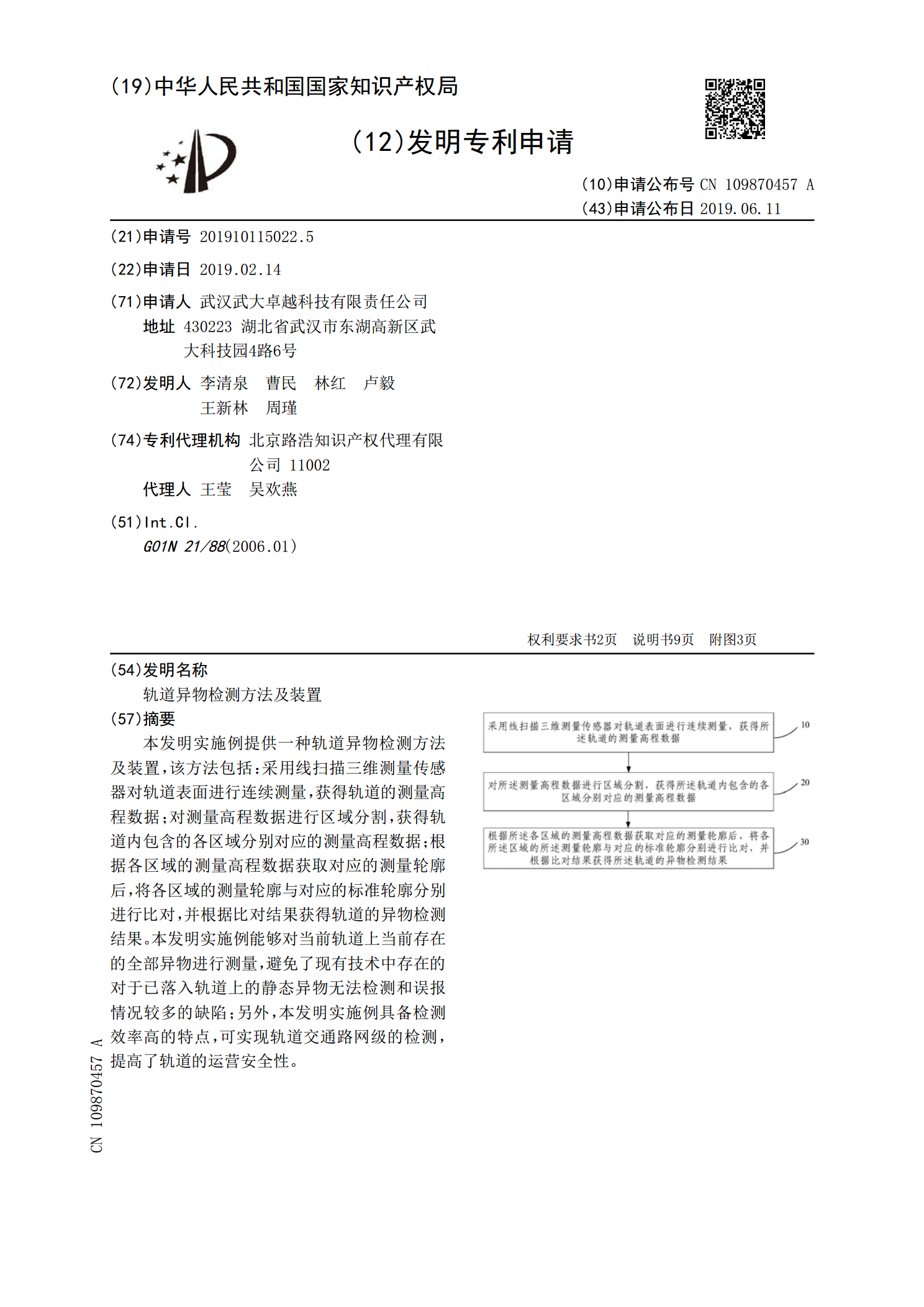
本申请涉及一种异物检测装置和异物检测方法,包括:与发射线圈平行的第一检测单元,设于发射线圈的耦合范围内,用于根据发射线圈提供的激励磁场,产生第一感应电信号集,第一感应电信号集包括多对第一感应信号和一对第二感应信号;控制模块,与第一检测单元连接,用于根据第一感应电信号集判断发射线圈的耦合范围内是否存在异物;第一检测单元包括第一检测线圈组和第二检测线圈组,第二检测线圈组的第一中线与发射线圈的第二中线重合,第一检测线圈组关于第一中线对称,第一检测线圈组用于产生多对第一感应信号,第二检测线圈组用于产生一对第二感应

基于无人机机器视觉的轨道异物入侵检测方法和装置.pdf
本发明提供一种基于无人机机器视觉的轨道异物入侵检测方法和装置,其中,所述方法包括以下步骤:获取无人机视角下的样本异物数据集,并进行目标种类和位置的标注;构建基于深度学习回归的目标检测模型,通过样本异物数据集对目标检测模型进行训练,其中,目标检测模型在检测头前引入了CBAM注意力模块,且目标检测模型边界框采用CIOU_Loss损失函数;利用无人机沿轨道采集视频数据;对视频数据进行帧处理,获取待检测区域,待检测区域为轨道及其左右两边各宽一条轨道的宽度的范围;使用训练后的目标检测模型对待检测区域进行检测,以判断

异物检测装置及其方法.pdf
本申请实施例涉及一种异物检测装置及其方法,所述异物检测装置,包括:天线组,包括多个检测天线,所述检测天线用于在移动过程中检测待检测异物并生成感应信号;检测电路,分别与多个所述检测天线连接,用于接收所述感应信号并生成交变检测信号,生成的所述交变检测信号的幅值或频率与所述感应信号的幅值相对应;处理器,与所述检测电路连接,用于接收所述交变检测信号,并根据所述交变检测信号获取所述天线组与待检测异物之间的相对位置关系。通过设置多个检测天线,可以根据不同检测天线的检测结果,获取多个检测天线与异物之间的相对位置关系,并
异物检测装置及其方法.pdf
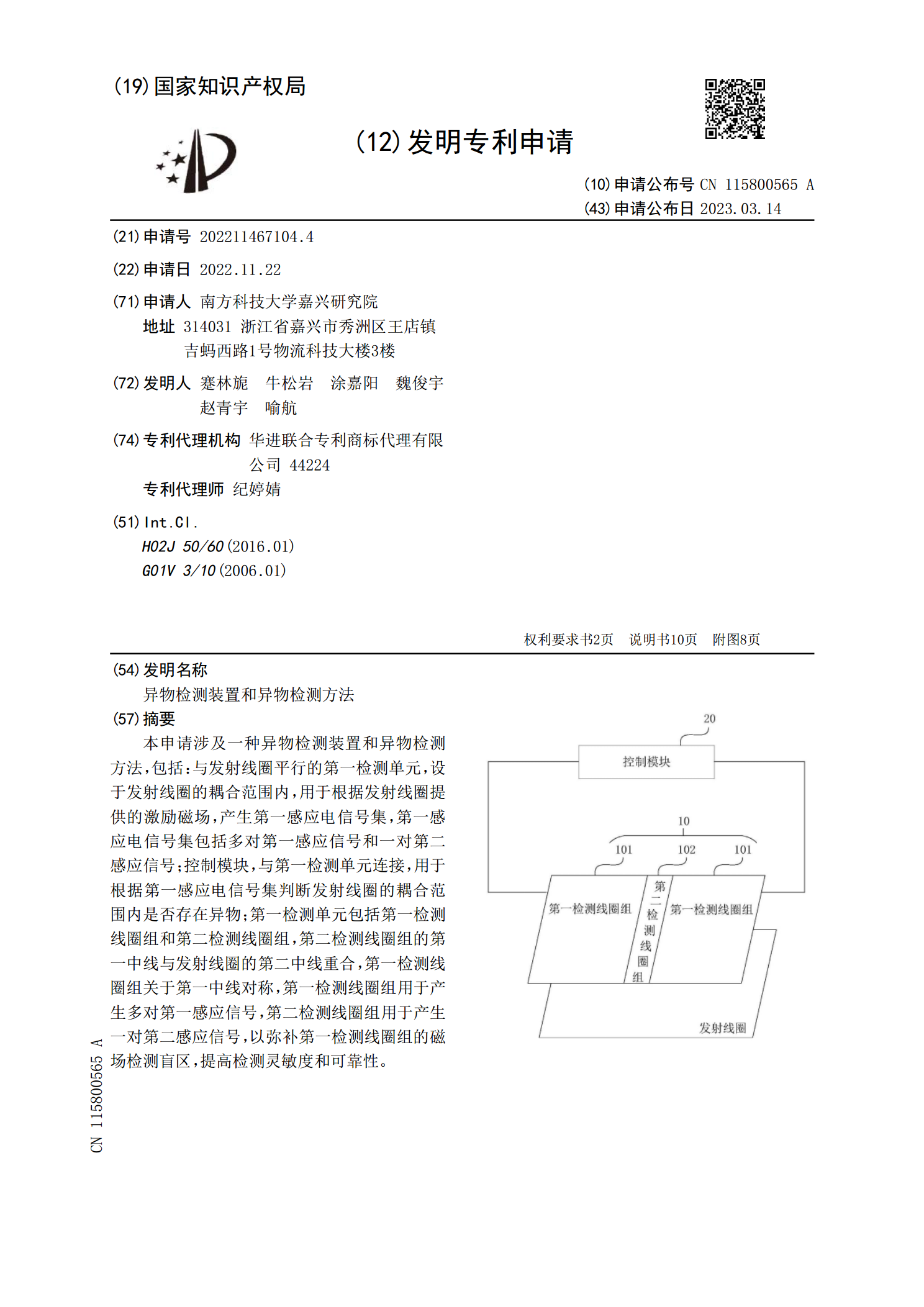
本申请实施例涉及一种异物检测装置及其方法,所述检测装置包括检测天线,包括第一检测单元和第二检测单元,所述第一检测单元用于在带电异物的磁场作用下生成第一感应电动势,所述第二检测单元用于在所述带电异物的磁场作用下生成第二感应电动势,所述检测天线用于输出所述第一感应电动势与所述第二感应电动势之和;检测电路,与所述检测天线连接,用于接收所述电动势之和并生成正弦信号,生成的所述正弦信号的幅值与所述电动势之和相对应;处理器,与所述检测电路连接,用于接收所述正弦信号,并根据所述正弦信号获取所述检测天线与所述带电异物之间