
基于无人机机器视觉的轨道异物入侵检测方法和装置.pdf

星星****眨眼

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于无人机机器视觉的轨道异物入侵检测方法和装置.pdf
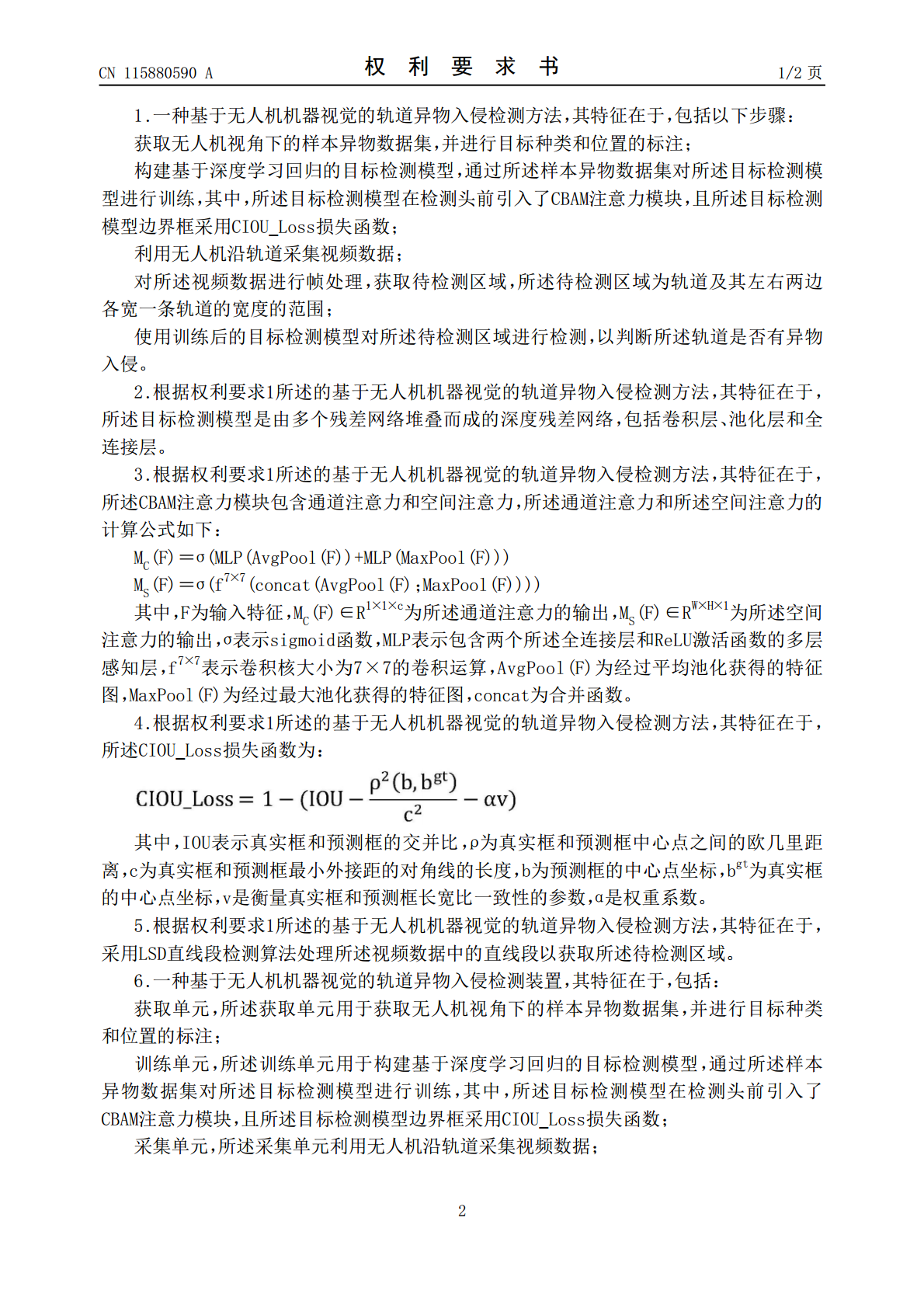
本发明提供一种基于无人机机器视觉的轨道异物入侵检测方法和装置,其中,所述方法包括以下步骤:获取无人机视角下的样本异物数据集,并进行目标种类和位置的标注;构建基于深度学习回归的目标检测模型,通过样本异物数据集对目标检测模型进行训练,其中,目标检测模型在检测头前引入了CBAM注意力模块,且目标检测模型边界框采用CIOU_Loss损失函数;利用无人机沿轨道采集视频数据;对视频数据进行帧处理,获取待检测区域,待检测区域为轨道及其左右两边各宽一条轨道的宽度的范围;使用训练后的目标检测模型对待检测区域进行检测,以判断

一种基于计算机视觉的直线轨道异物入侵检测方法及装置.pdf
本发明公开了一种基于计算机视觉的直线轨道异物入侵检测方法及装置,包括:读取相机图像,灰度化处理;梯度特征提取;二值化处理;掩膜覆盖,留下感兴趣区域内的有效信息;对二值化感兴趣图像进行处理,得到图像内的线段特征;对线段特征进行规则过滤,留下符合轨道特点的直线特征;对线段集合进行聚类;对线段簇的中心线进行提取,根据规则进行限制,取最接近中心的两条中心线,得到趋势线;在感兴趣区域上,将趋势线周围的区域转换为鸟瞰图视角;检测趋势线上二值化特征断开的部分,得到障碍物信息;将鸟瞰图视角下的障碍物信息转换为原图尺寸的信
基于机器视觉的立面检测装置和检测方法.pdf
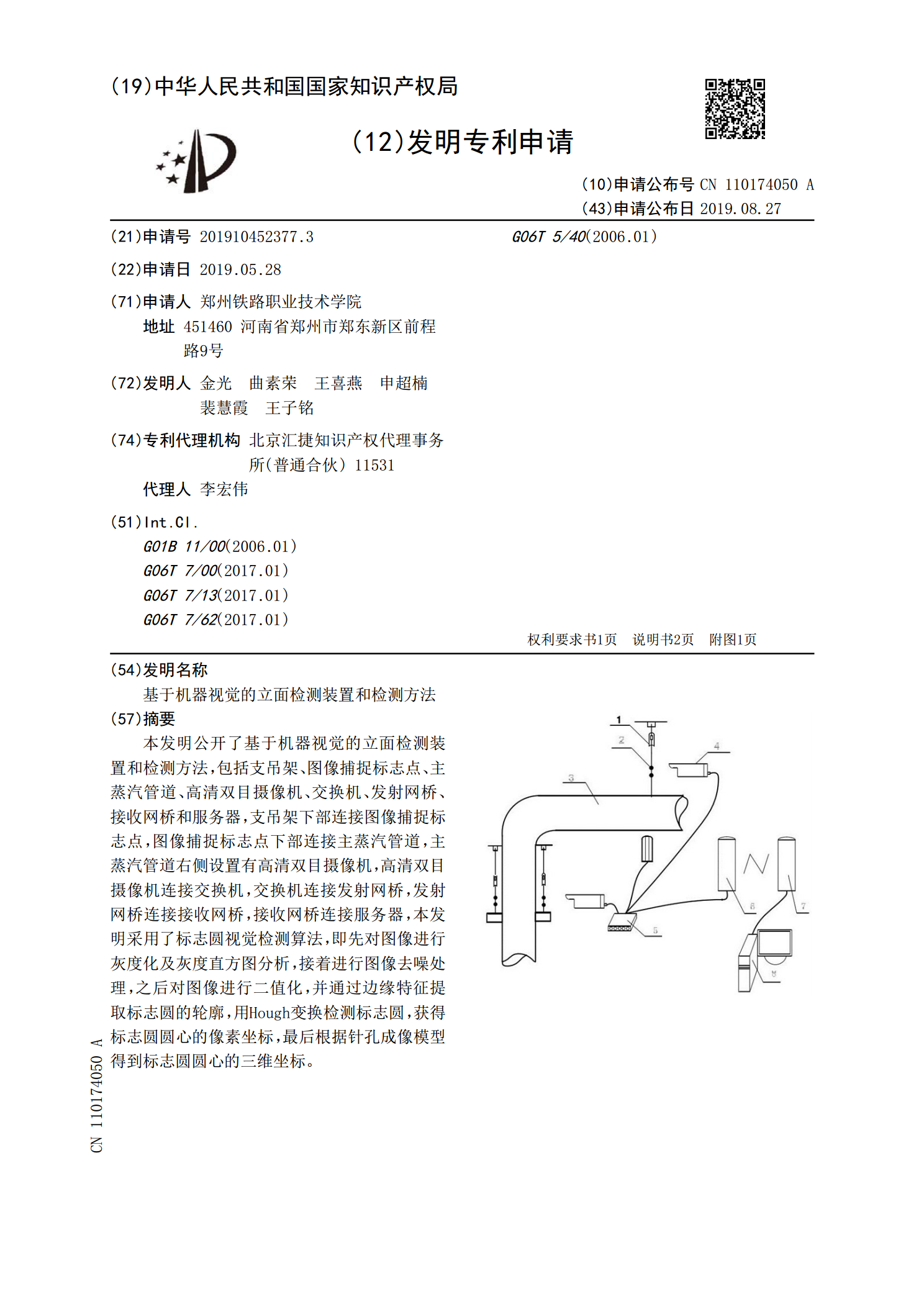
本发明公开了基于机器视觉的立面检测装置和检测方法,包括支吊架、图像捕捉标志点、主蒸汽管道、高清双目摄像机、交换机、发射网桥、接收网桥和服务器,支吊架下部连接图像捕捉标志点,图像捕捉标志点下部连接主蒸汽管道,主蒸汽管道右侧设置有高清双目摄像机,高清双目摄像机连接交换机,交换机连接发射网桥,发射网桥连接接收网桥,接收网桥连接服务器,本发明采用了标志圆视觉检测算法,即先对图像进行灰度化及灰度直方图分析,接着进行图像去噪处理,之后对图像进行二值化,并通过边缘特征提取标志圆的轮廓,用Hough变换检测标志圆,获得标
基于机器视觉的立面检测装置和检测方法.pdf
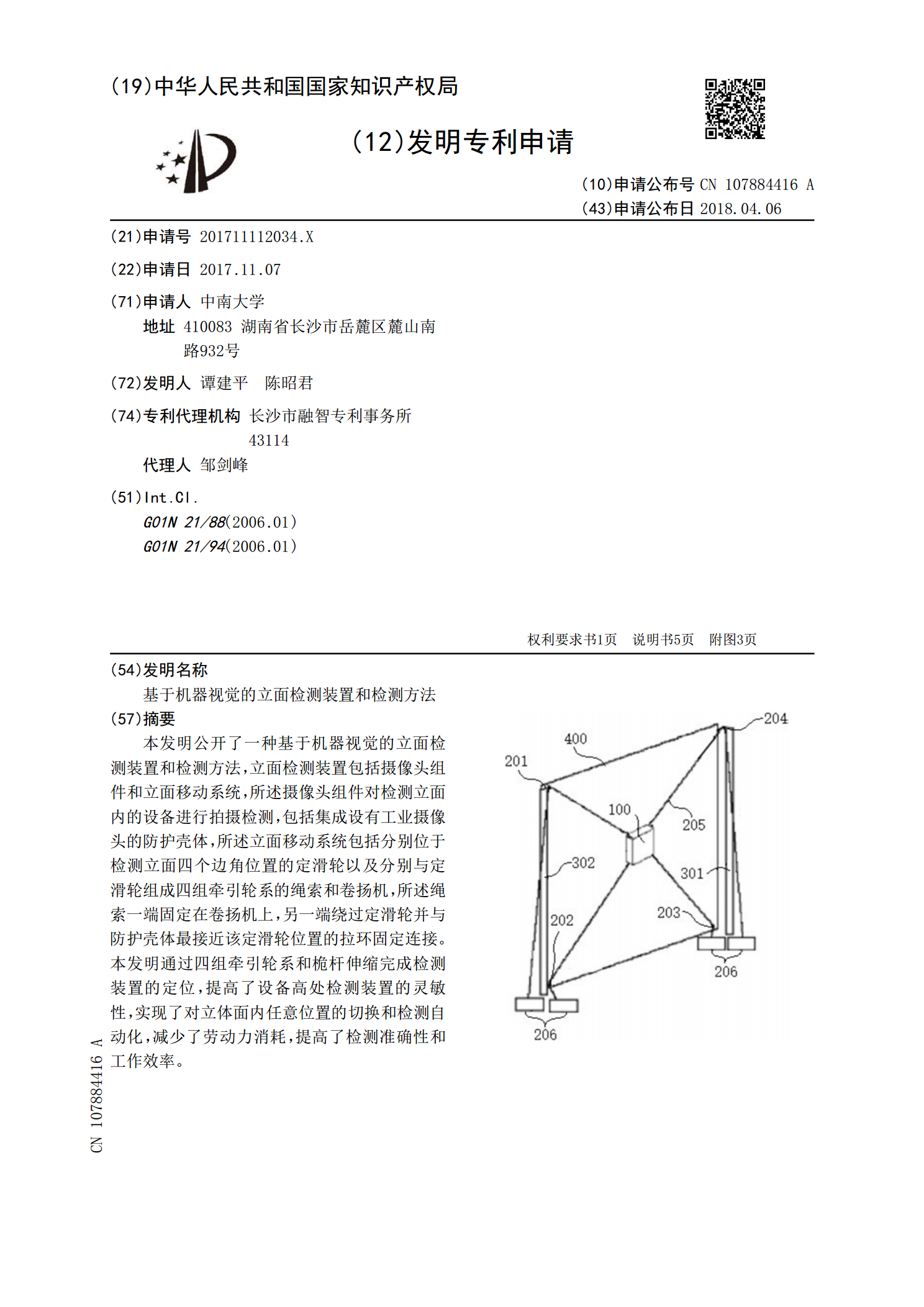
本发明公开了一种基于机器视觉的立面检测装置和检测方法,立面检测装置包括摄像头组件和立面移动系统,所述摄像头组件对检测立面内的设备进行拍摄检测,包括集成设有工业摄像头的防护壳体,所述立面移动系统包括分别位于检测立面四个边角位置的定滑轮以及分别与定滑轮组成四组牵引轮系的绳索和卷扬机,所述绳索一端固定在卷扬机上,另一端绕过定滑轮并与防护壳体最接近该定滑轮位置的拉环固定连接。本发明通过四组牵引轮系和桅杆伸缩完成检测装置的定位,提高了设备高处检测装置的灵敏性,实现了对立体面内任意位置的切换和检测自动化,减少了劳动力

基于机器视觉的铁路道口异物检测方法研究.docx
基于机器视觉的铁路道口异物检测方法研究题目:基于机器视觉的铁路道口异物检测方法研究摘要:近年来,铁路交通的快速发展和安全性的重要性使得铁路道口的安全问题备受关注。异物(如人员、车辆、货物等)进入铁路道口可能会导致严重的事故和经济损失。因此,本文旨在研究基于机器视觉的铁路道口异物检测方法。首先,我们介绍了机器视觉技术在铁路道口安全领域的应用背景和意义。然后,我们详细探讨了铁路道口异物检测的关键技术,包括图像获取、图像预处理、特征提取和分类识别等。最后,我们提出了一种基于深度学习的异物检测方法,并通过实验验证