
机器人喷涂设备及其控制方法.pdf

瀚玥****魔王


1/10
2/10

3/10

4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机器人喷涂设备及其控制方法.pdf
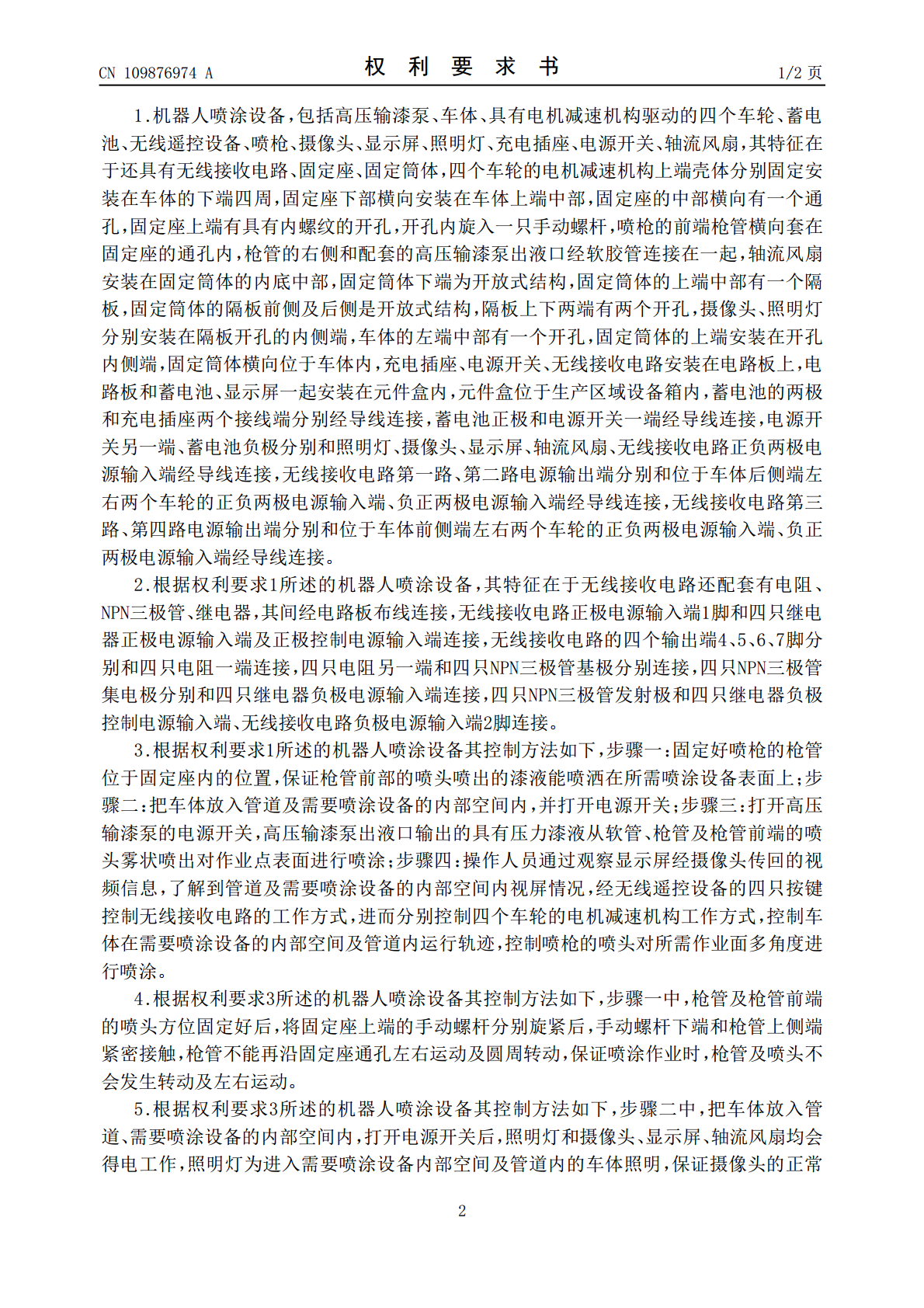
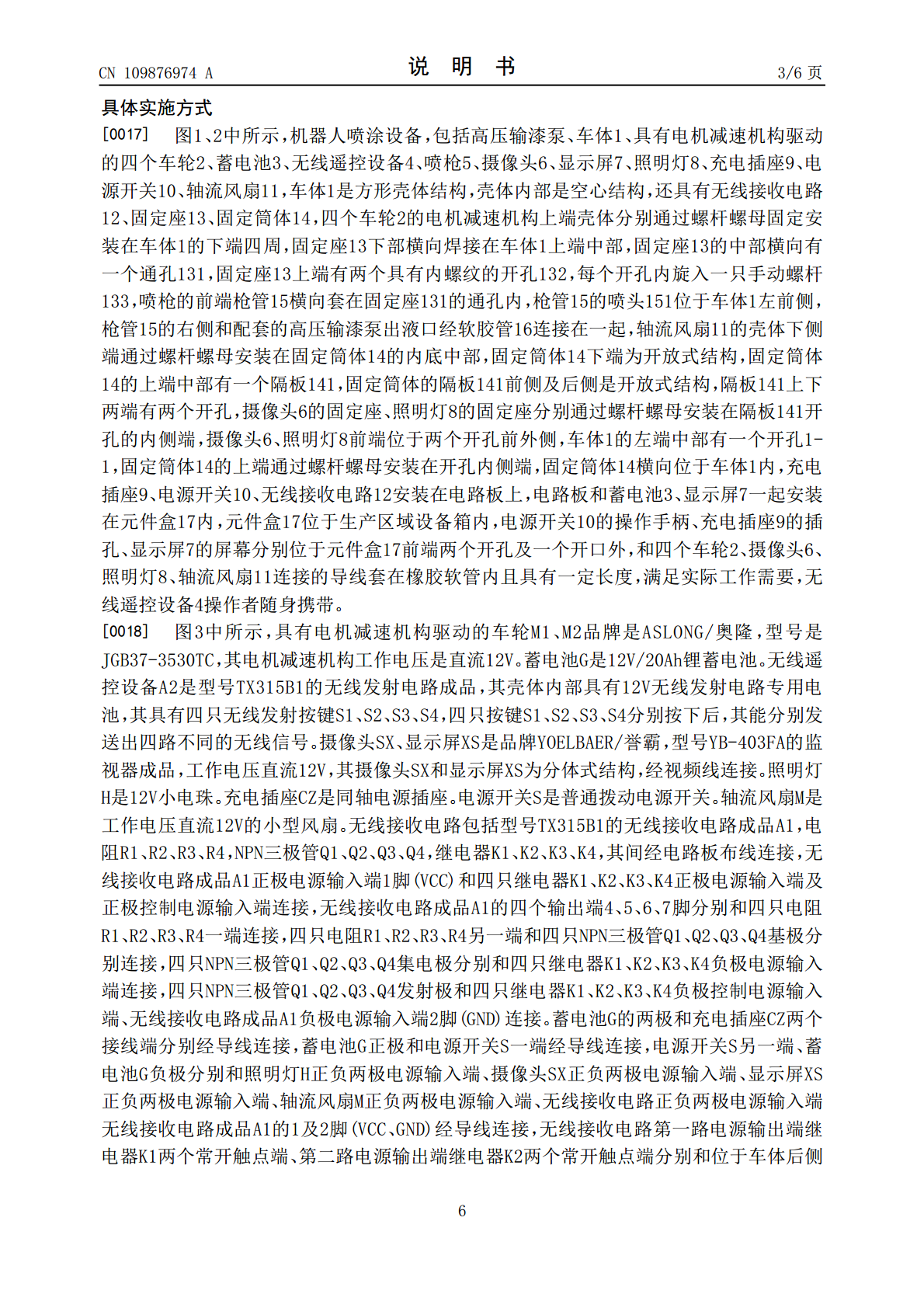
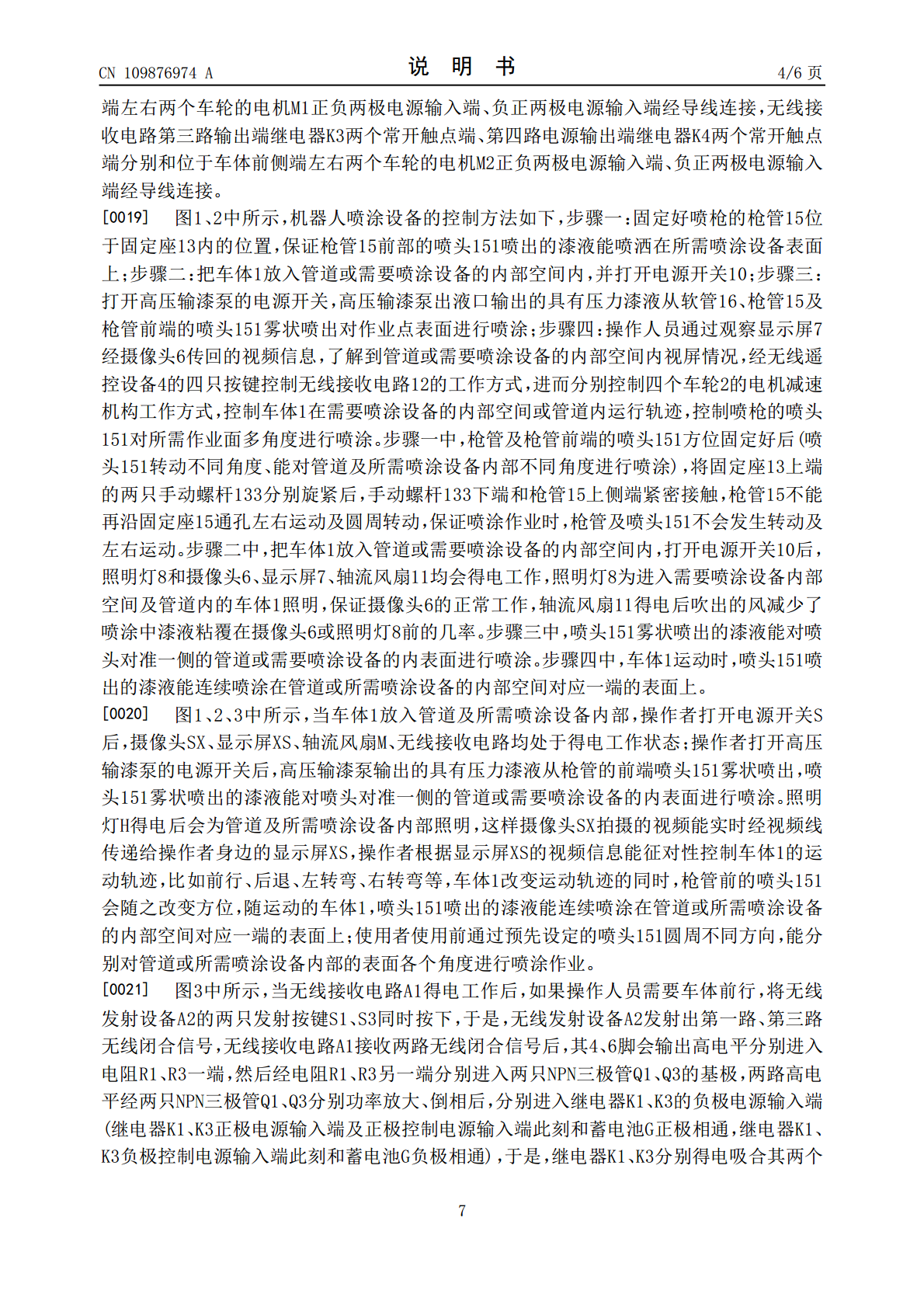
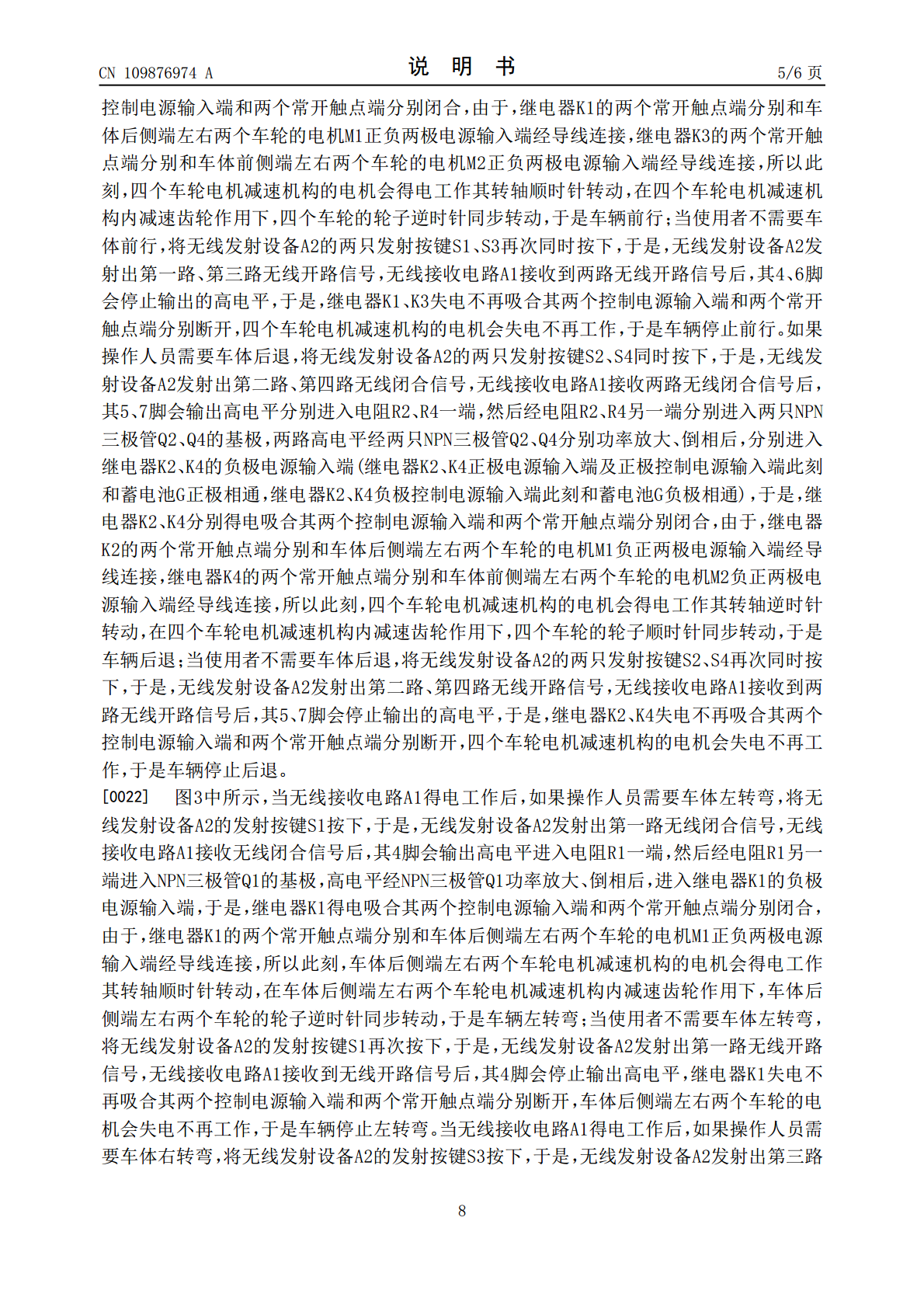
机器人喷涂设备,包括高压输漆泵、车体、车轮、蓄电池、无线遥控设备、喷枪、摄像头、显示屏、照明灯、充电插座、电源开关、轴流风扇,还具有无线接收电路、固定座、固定筒体,车轮安装在车体下端四周,固定座安装在车体上中部,喷枪枪管套在固定座的通孔内,轴流风扇安装在固定筒体的内底中部,摄像头、照明灯分别安装在固定筒体隔板开孔的内侧端,车体的左端中部有一个开孔,固定筒体的上端安装在开孔内侧端,车轮、蓄电池、摄像头、显示屏、照明灯、充电插座、电源开关、轴流风扇、无线接收电路经导线连接。机器人喷涂设备其控制方法分为四个步骤

一种喷涂机器人及其喷涂方法.pdf
本发明公开一种喷涂机器人,包括呈C型的连接环、用于带动连接环转动的电动转台、机架、控制装置、用于夹住矩形箱体型的工件的夹持装置、第一雾化喷头和第二雾化喷头,所述连接环位于电动转台上面,所述连接环为中空设置,所述连接环内部形成有气腔,所述连接环的内环面开有排气孔,所述排气孔与气腔相连通,所述连接环上端面设置有连接板,所述连接板与连接环固定连接,所述机架上设置有轴承,所述连接板与轴承的内圈固定连接,所述连接板与机架通过轴承转动连接,所述连接板上设置有底漆灌、第一泵体、面漆灌、第二泵体和向气腔提供热风的热风机;

高架路桥自动喷涂机器人及其控制方法.pdf
本发明提供一种高架路桥自动喷涂机器人,包括电源、搭载板、微控制器,喷涂设备,其中,还包括与所述搭载板连接的悬挂架、主动轮、以及伸展臂,其中,所述伸展臂上设置有所述喷涂设备的喷嘴,所述微控制器连接所述主动轮、伸展臂、以及喷涂设备。还提供相应的控制方法。本发明悬挂在高架路桥的栏杆上,对高架路桥的底部自动进行多方位喷涂作业,同时进行烘干处理,让粉刷高架路桥这一辛苦、高危工作实现自动化。

自动喷枪、喷涂设备及喷涂设备的喷涂控制方法.pdf
本申请提供一种自动喷枪、喷涂设备及喷涂设备的喷涂控制方法,自动喷枪包括活塞外壳、撞针活塞、复位弹簧及喷嘴,撞针活塞设置于活塞外壳中;复位弹簧沿撞针活塞的移动方向设置于活塞外壳上,用于驱使撞针活塞移动;喷嘴设置于活塞外壳的前端部上;撞针活塞的后端部设置有输料接口,撞针活塞及活塞外壳设置有相连通的流体通道及喷涂物料腔室,流体通道用于喷涂物料的输送,喷涂物料腔室用于储存喷涂物料,撞针活塞的前端部通过喷涂物料腔室中喷涂物料的作用紧贴活塞外壳的出料口或与活塞外壳的出料口留有出料间隙。本申请自动喷枪、喷涂设备及喷涂设

喷涂机器人、喷涂机器人的控制方法和存储介质.pdf
本发明提供了一种喷涂机器人、一种喷涂机器人的控制方法和一种计算机可读存储介质。其中,喷涂机器人包括:悬架机构;激光传感器,激光传感器设置在悬架结构上,用于获取环境信息;舵轮,舵轮设置在悬架机构上,能够控制悬架机构移动;控制装置,控制装置分别与激光传感器和舵轮相连接,用于控制悬架机构移动,并根据环境信息构建地图信息。设置在悬架机构上的激光传感器能够记录悬架机构移动过程中的环境信息,以便控制装置根据环境信息构建地图信息,由于喷涂机器人能够自动构建地图信息,喷涂机器人能够根据地图信息进行移动和/或喷涂,减少了人