
一种四驱联动行驶底盘结构及四驱联动行驶系统.pdf

阳炎****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种四驱联动行驶底盘结构及四驱联动行驶系统.pdf
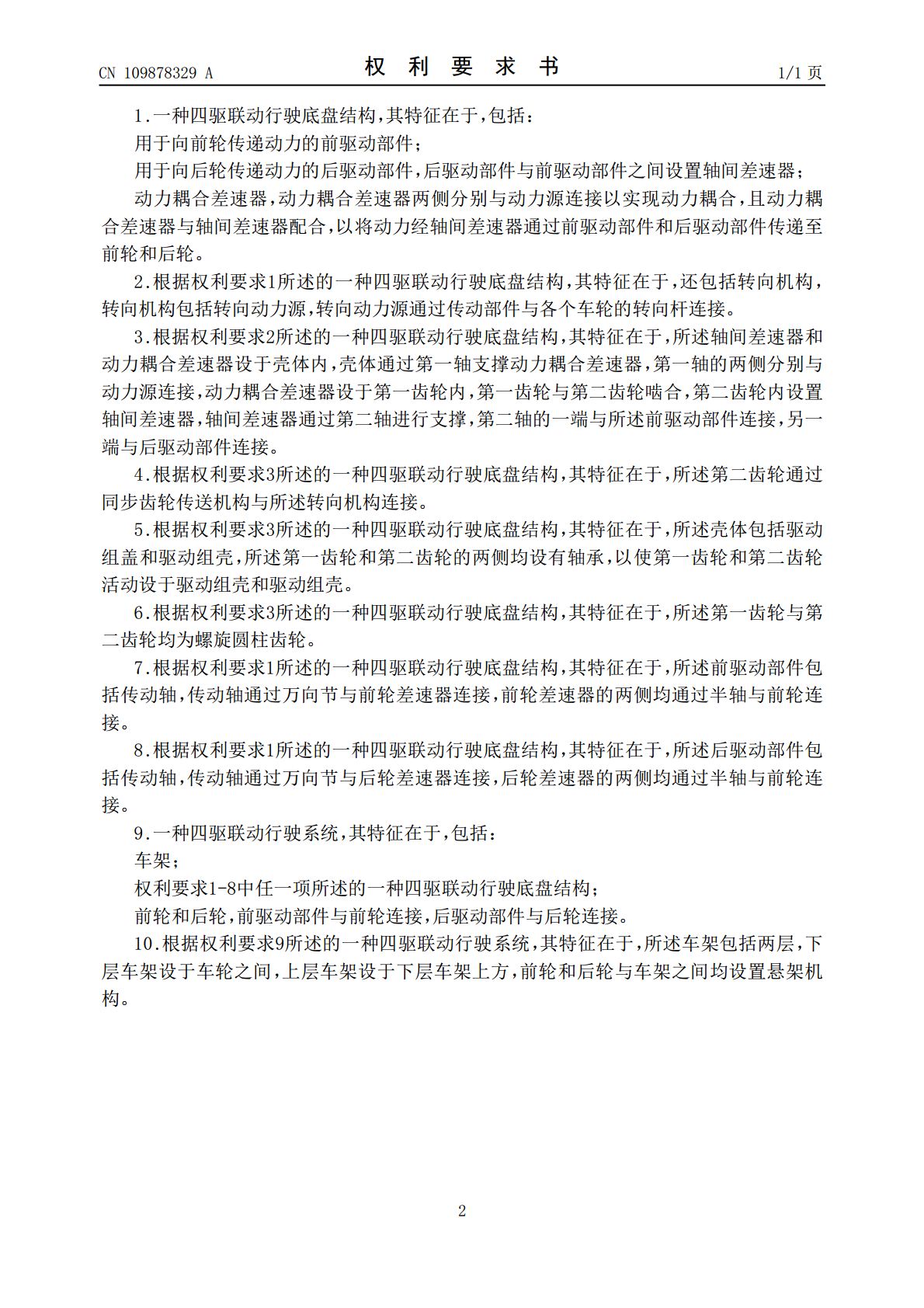
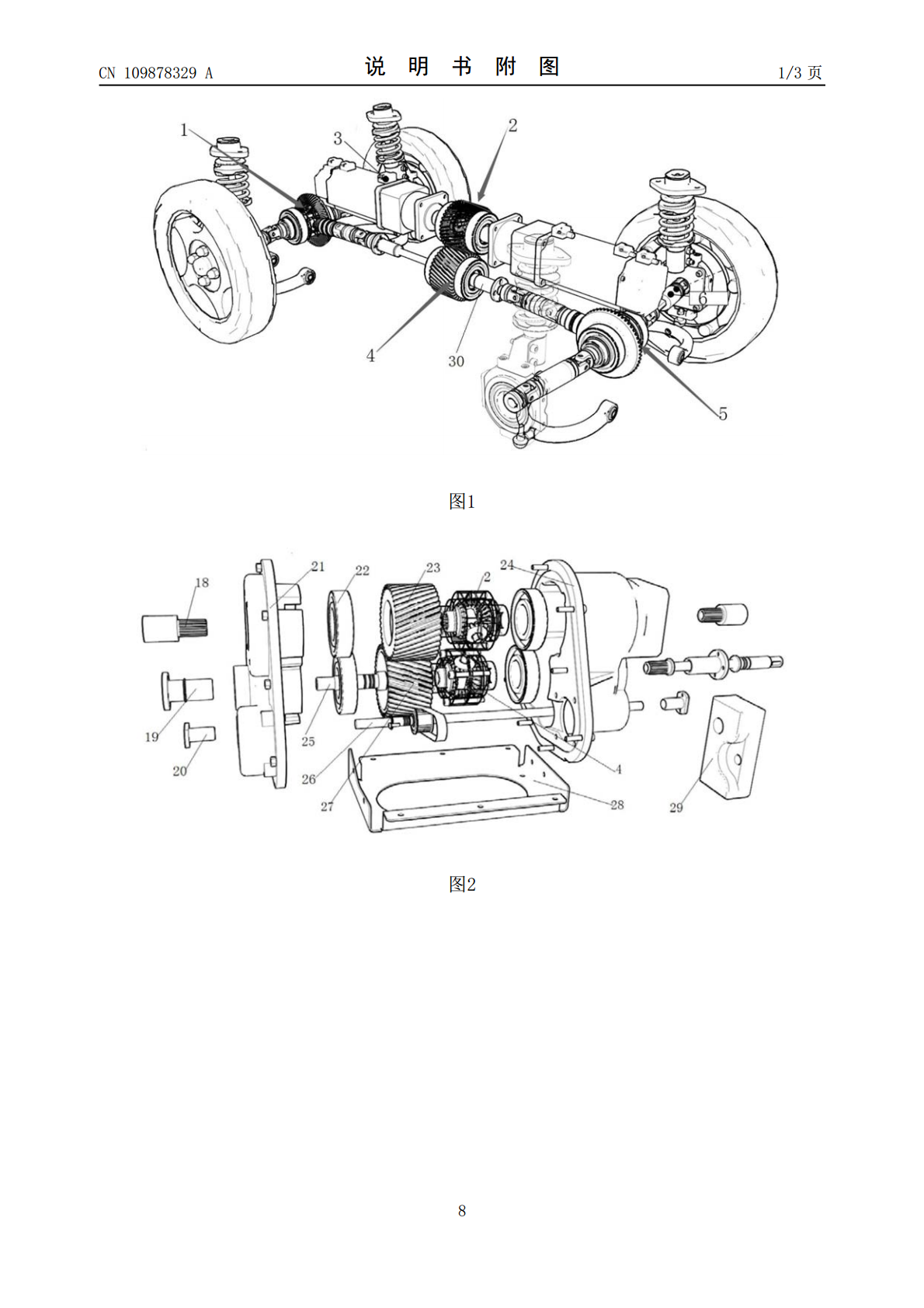
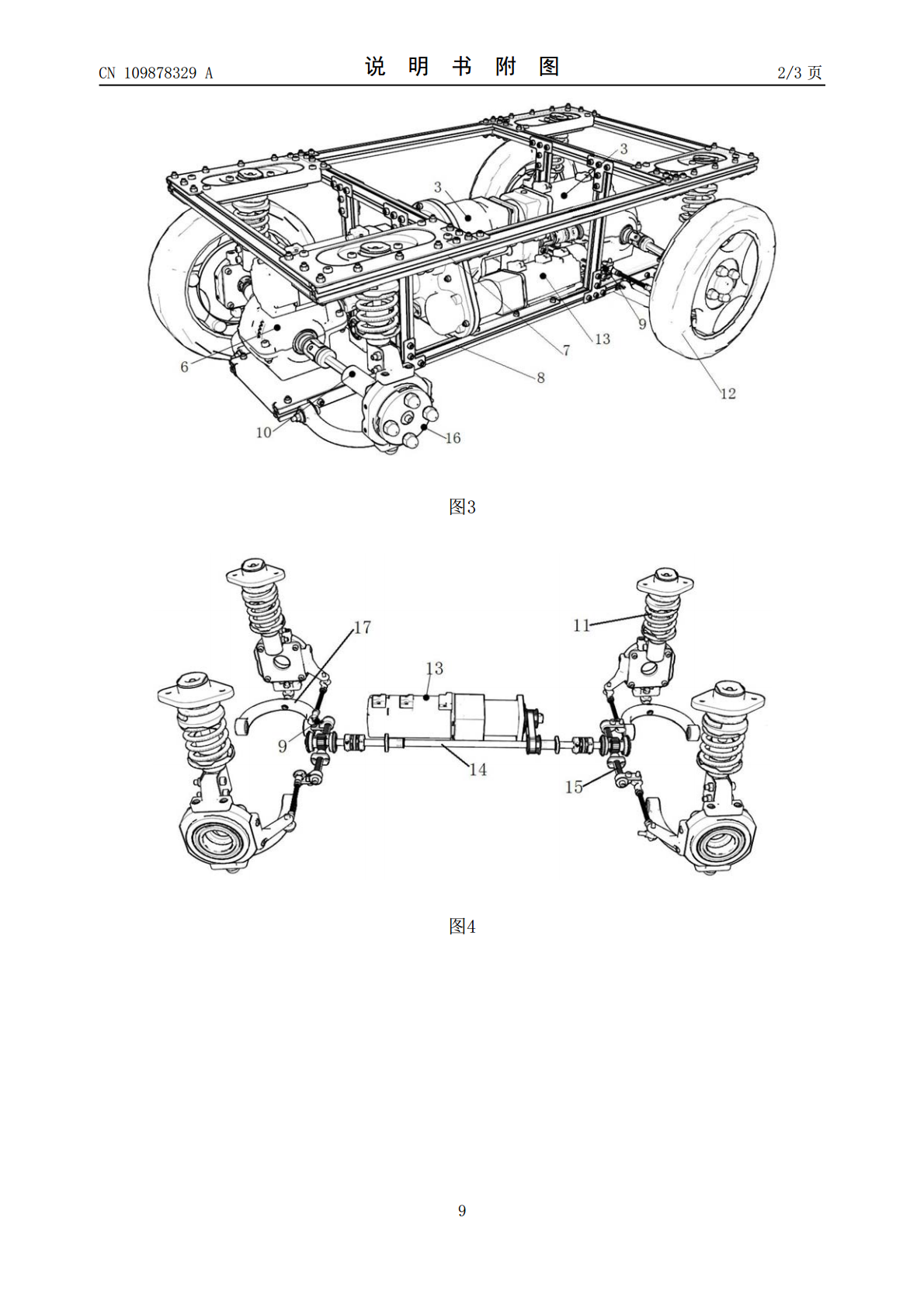
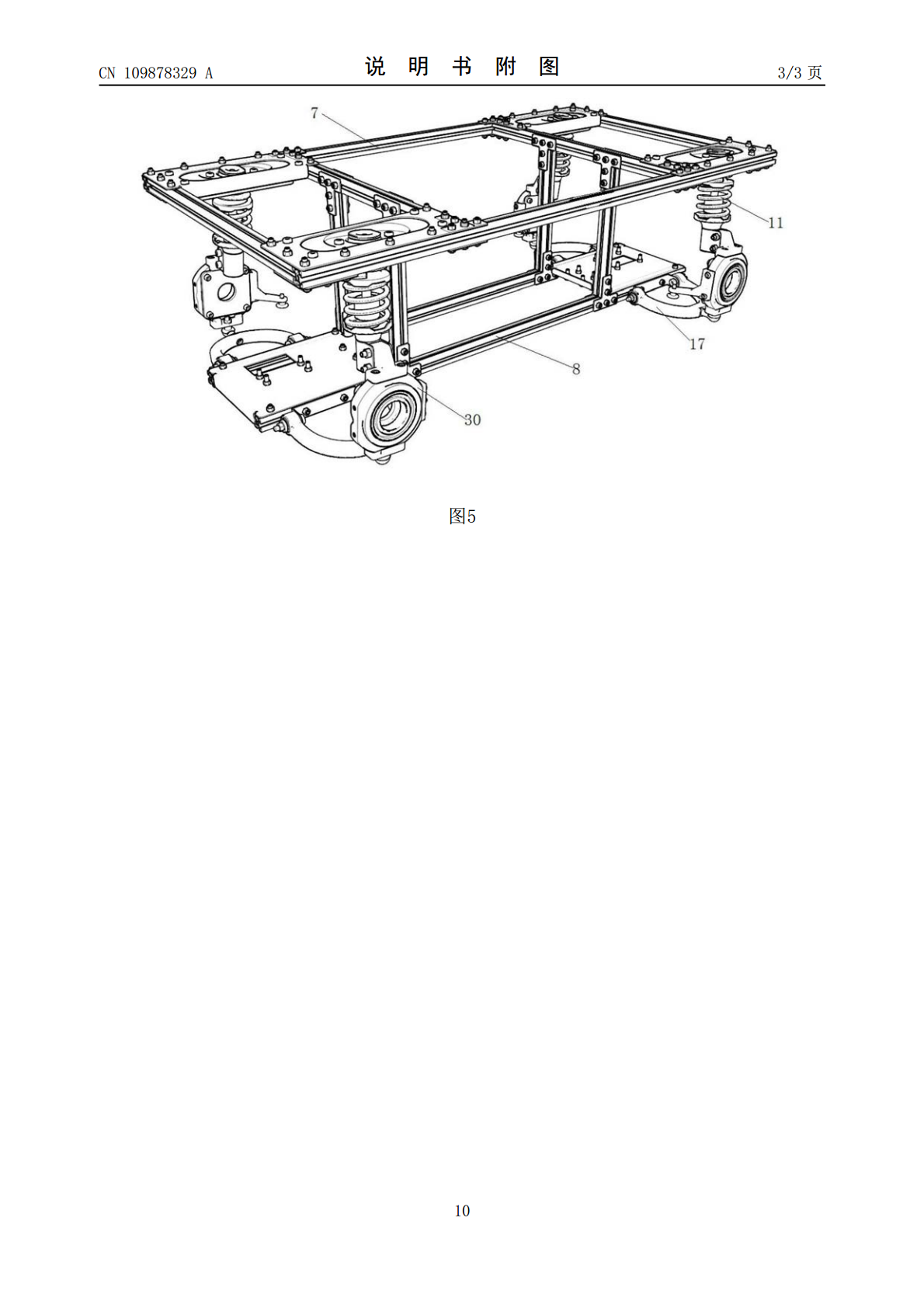
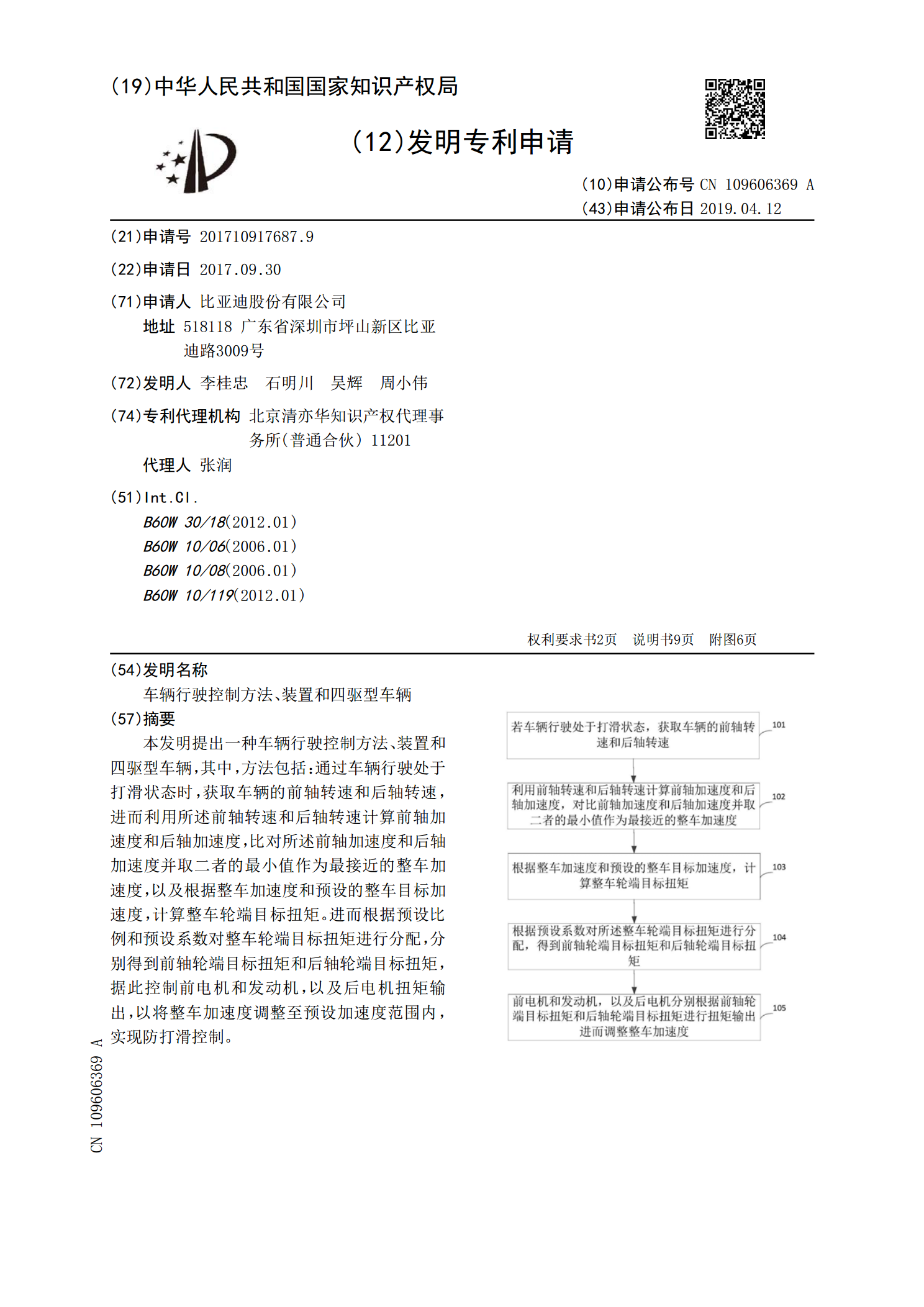
本发明公开了一种四驱联动行驶底盘结构及四驱联动行驶系统,它解决了现有技术中通过8个电机来控制底盘的行驶和转向问题,具有减轻底盘质量,便于控制操作的有益效果,其方案如下:一种四驱联动行驶底盘结构,包括用于向前轮传递动力的前驱动部件;用于向后轮传递动力的后驱动部件,后驱动部件与前驱动部件之间设置轴间差速器;动力耦合差速器,动力耦合差速器两侧分别与动力源连接以实现动力耦合,且动力耦合差速器与轴间差速器配合,以将动力经轴间差速器通过前驱动部件和后驱动部件传递至前轮和后轮。

一种能适应林地等复杂地形行驶的履带轮式四驱底盘装置.pdf
本发明涉及一种能适应林地等复杂地形行驶的履带轮式四驱底盘装置,包括车架、履带轮、链轮、液压马达、液压制动缸、车架轴承座和联轴器组件,其特征是:车架主体由方钢管焊接而成,前轮右侧部分由液压马达、联轴器组件、车架轴承座和履带轮顺序连接,前轮左侧部分由液压制动缸、摩擦轮盘、联轴器组件、车架轴承座和履带轮顺序连接,后轮右侧与左侧结构分别与前轮左侧与右侧结构相同,前后履带轮之间通过链轮传动传送动力,形成四轮驱动。本发明采用液压驱动,动力强劲,加上链轮四轮驱动的结构设计,极大的提高了底盘的越障能力,增强了底盘对林地等
车辆行驶控制方法、装置和四驱型车辆.pdf
本发明提出一种车辆行驶控制方法、装置和四驱型车辆,其中,方法包括:通过车辆行驶处于打滑状态时,获取车辆的前轴转速和后轴转速,进而利用所述前轴转速和后轴转速计算前轴加速度和后轴加速度,比对所述前轴加速度和后轴加速度并取二者的最小值作为最接近的整车加速度,以及根据整车加速度和预设的整车目标加速度,计算整车轮端目标扭矩。进而根据预设比例和预设系数对整车轮端目标扭矩进行分配,分别得到前轴轮端目标扭矩和后轴轮端目标扭矩,据此控制前电机和发动机,以及后电机扭矩输出,以将整车加速度调整至预设加速度范围内,实现防打滑控制
一种绳驱联动的机械夹持装置.pdf
本发明公开了一种绳驱联动的机械夹持装置,包括基座、第一级指节和第二级指节;其中,第一级指节基于铰链与基座连接,第二级指节基于铰链与第二级指节连接;所述基座内部包括与第一级指节数量一致的开阖线单元和收缩线单元,所述开阖线单元和收缩线单元各引出对应的驱动线,标记其为开阖线和收缩线,所述开阖线和收缩线不处于同一直线;开阖线单元和收缩线单元通过牵引各自的驱动线以产生力矩差,基于力矩差驱动指节。本发明通过不在一条直线上的两条驱动线产生的不同的力矩来推动指节运动,基于弹簧的弹力改变力矩以实现自动归位,使用滑轮同时连接
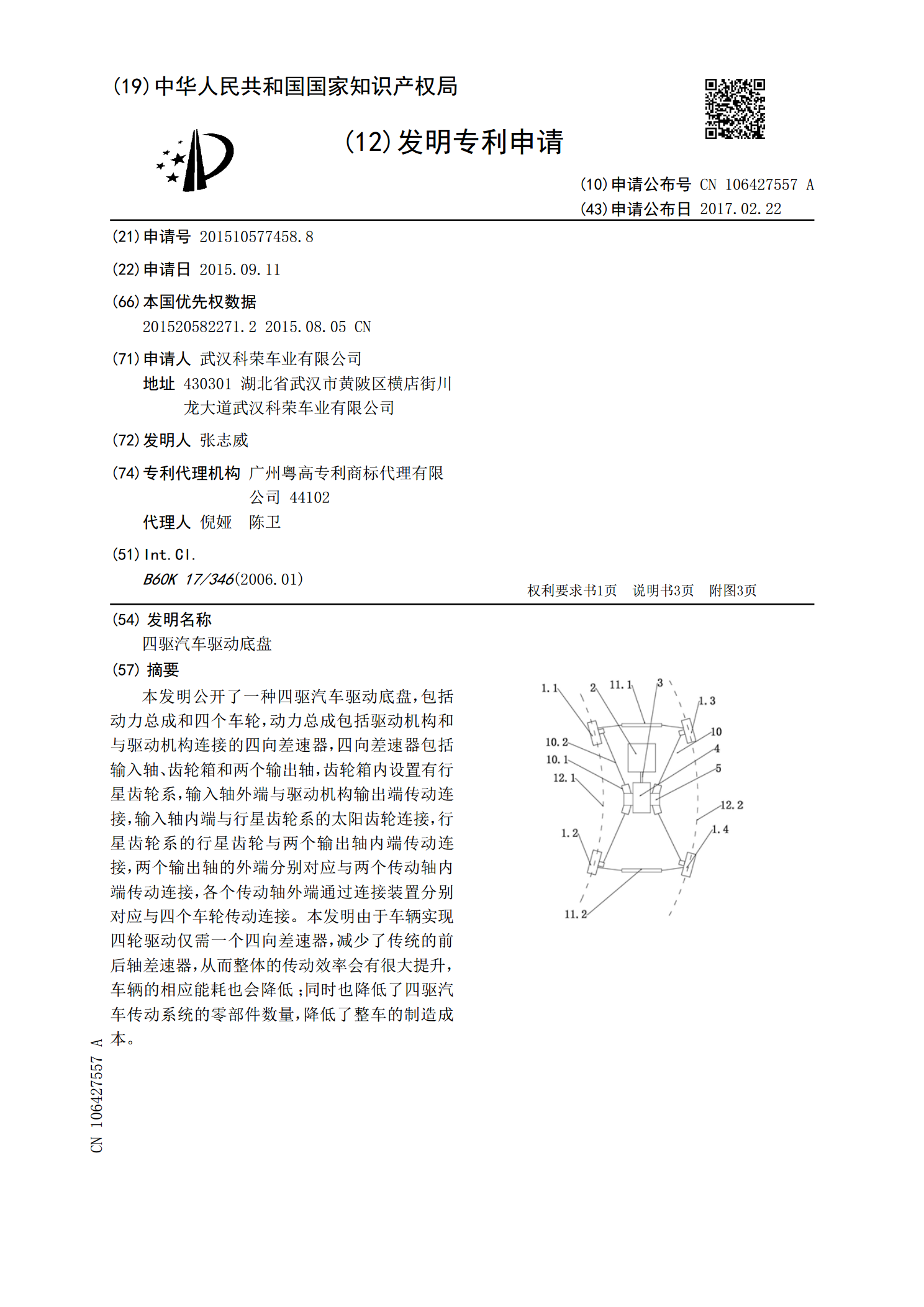
四驱汽车驱动底盘.pdf
本发明公开了一种四驱汽车驱动底盘,包括动力总成和四个车轮,动力总成包括驱动机构和与驱动机构连接的四向差速器,四向差速器包括输入轴、齿轮箱和两个输出轴,齿轮箱内设置有行星齿轮系,输入轴外端与驱动机构输出端传动连接,输入轴内端与行星齿轮系的太阳齿轮连接,行星齿轮系的行星齿轮与两个输出轴内端传动连接,两个输出轴的外端分别对应与两个传动轴内端传动连接,各个传动轴外端通过连接装置分别对应与四个车轮传动连接。本发明由于车辆实现四轮驱动仅需一个四向差速器,减少了传统的前后轴差速器,从而整体的传动效率会有很大提升,车辆的