
一种绳驱联动的机械夹持装置.pdf

星菱****23


1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种绳驱联动的机械夹持装置.pdf
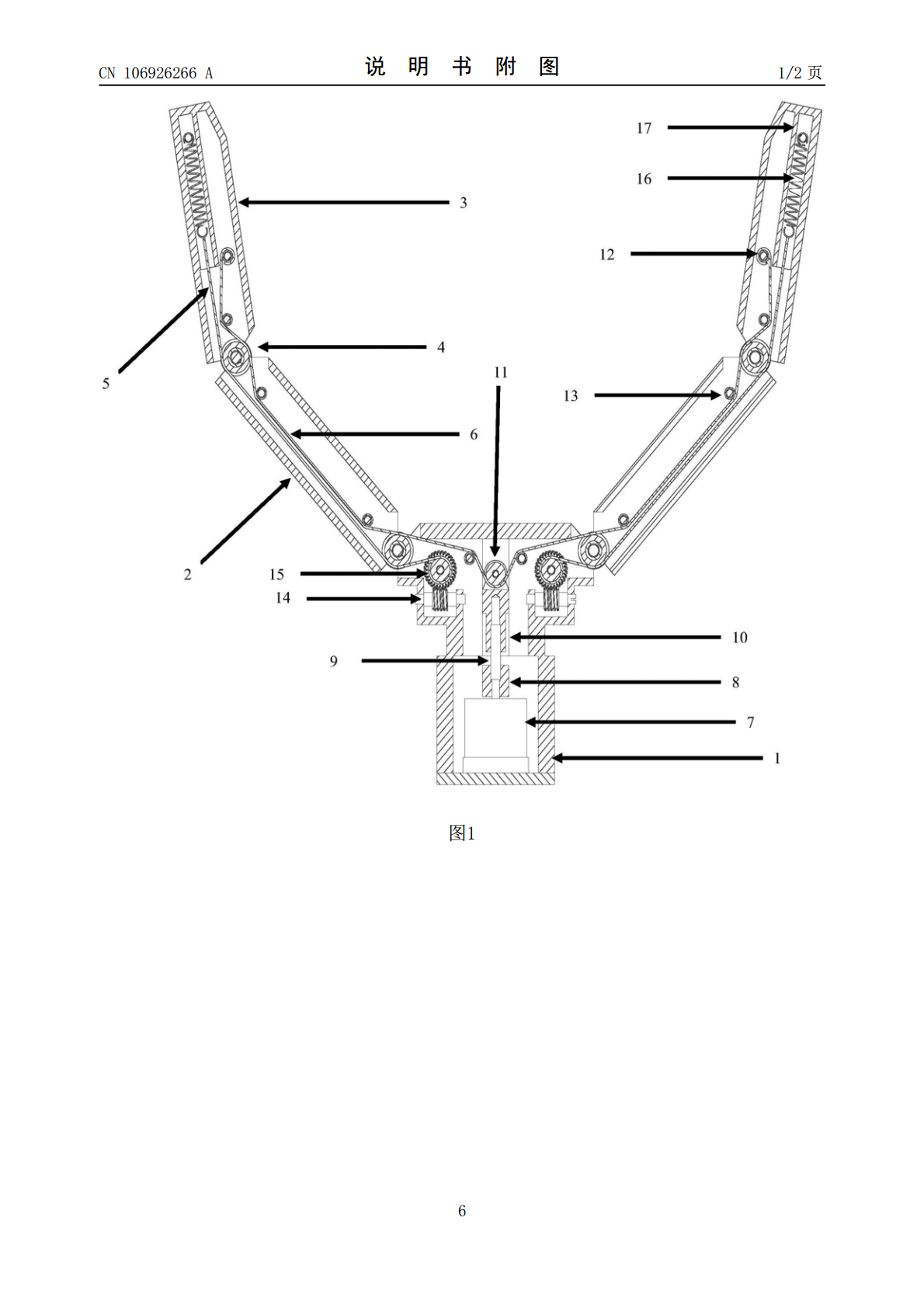
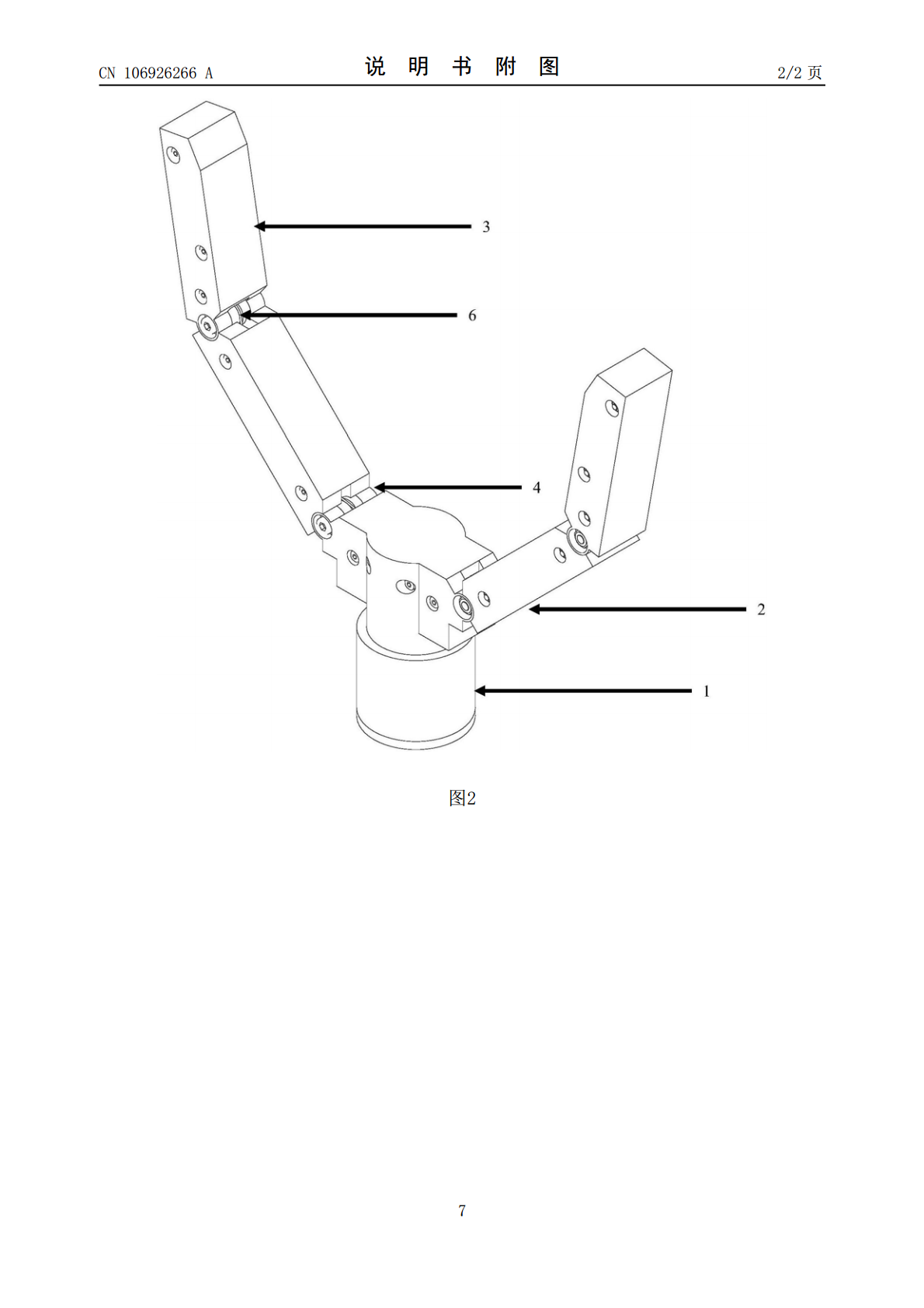
本发明公开了一种绳驱联动的机械夹持装置,包括基座、第一级指节和第二级指节;其中,第一级指节基于铰链与基座连接,第二级指节基于铰链与第二级指节连接;所述基座内部包括与第一级指节数量一致的开阖线单元和收缩线单元,所述开阖线单元和收缩线单元各引出对应的驱动线,标记其为开阖线和收缩线,所述开阖线和收缩线不处于同一直线;开阖线单元和收缩线单元通过牵引各自的驱动线以产生力矩差,基于力矩差驱动指节。本发明通过不在一条直线上的两条驱动线产生的不同的力矩来推动指节运动,基于弹簧的弹力改变力矩以实现自动归位,使用滑轮同时连接
一种绳驱机械臂的绕线方式.pdf
本发明涉及一种绳驱机器人。目的是提供一种绳驱机械臂的绕线方式,该方式应能减轻机械臂的重量,并能提高机械臂的便携性和操控性。技术方案是:一种绳驱机械臂的绕线方式,其特征在于:传动绳先沿着顺时针方向在底部绕线轮上缠绕若干圈,接着以逆时针方向绕过张紧装置的第二导向轮后向上依次穿过底板的绳孔与导向轴的定位孔,然后沿着逆时针方向在小臂绕线轮上缠绕若干圈后向下依次回穿所述定位孔与绳孔,再以顺时针方向绕过张紧装置的第一导向轮,最后回缠在底部绕线轮上。
一种机械夹持装置.pdf
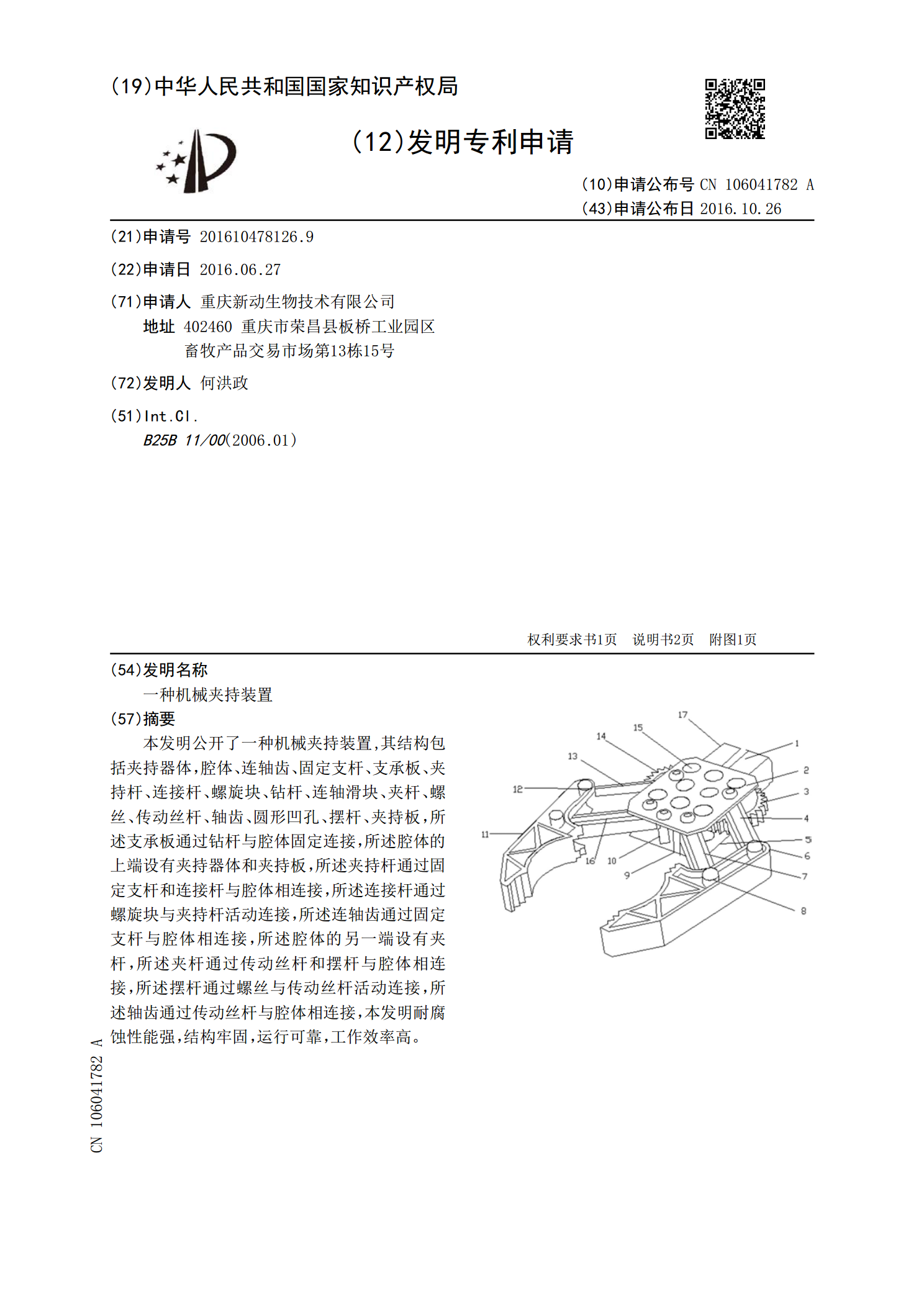
本发明公开了一种机械夹持装置,其结构包括夹持器体,腔体、连轴齿、固定支杆、支承板、夹持杆、连接杆、螺旋块、钻杆、连轴滑块、夹杆、螺丝、传动丝杆、轴齿、圆形凹孔、摆杆、夹持板,所述支承板通过钻杆与腔体固定连接,所述腔体的上端设有夹持器体和夹持板,所述夹持杆通过固定支杆和连接杆与腔体相连接,所述连接杆通过螺旋块与夹持杆活动连接,所述连轴齿通过固定支杆与腔体相连接,所述腔体的另一端设有夹杆,所述夹杆通过传动丝杆和摆杆与腔体相连接,所述摆杆通过螺丝与传动丝杆活动连接,所述轴齿通过传动丝杆与腔体相连接,本发明耐腐蚀

一种机械夹持装置.pdf
本发明公开一种机械夹持装置,包括固定座以及立柱,立柱的中心设有横向设置的轴,该轴贯穿立柱设置,一端靠近固定座设置,另一端置于立柱的外侧,轴靠近固定座一端设有推进螺杆且轴的外圈套装有齿轮组,该齿轮组与推进螺杆连接,轴置于立柱外侧的一端设有手动旋转环。固定座的端面设有与推进螺杆对应设置的凸台。凸台上设有缓冲垫,所述推进螺杆的一端设有缓冲垫。本发明具有结构简单,操作简便,提高工作效率,防止工件发生损坏的优点。

一种塑料盖夹持联动夹紧旋盖装置.pdf
本发明公开了一种塑料盖夹持联动夹紧旋盖装置,包括有安装底板,在所述安装底板上设有安装孔,其特征在于:在所述安装孔内设有夹爪传动轴,在所述夹爪传动轴下端连接有夹爪定位板,在所述夹爪定位板上铰接有多个能夹持塑料盖的夹爪,在所述夹爪传动轴上设有能驱使夹爪传动轴转动的传动同步齿轮,在所述夹爪传动轴内设有能驱使夹爪打开或收合的拉杆,在所述拉杆下端设有拉杆座,所述夹爪通过铰接件铰接在拉杆座上,在所述安装底板上方设有能驱动拉杆上、下移动的驱动装置,在所述驱动装置与拉杆之间设有能防止驱动装置与拉杆同步转动的分离连接机构。