
一种差速转向控制的电动四轮滑板.pdf

秀华****魔王


1/10
2/10
3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种差速转向控制的电动四轮滑板.pdf
本发明公开了一种差速转向控制的电动四轮滑板,根据陀螺仪传感器输出的横滚角值判定用户转向意图,差速转向控制模型的控制目标为转向外侧的轮毂电机转速大于转向内侧的轮毂电机转速,转向外侧的轮毂电机与转向内侧的轮毂电机转速差值与横滚角值呈正相关。本发明加入差速转向控制,从而减小了转弯半径,提升安全性和便利性,并减少轮毂电机无法达到额定转速带来的电机损耗,延长产品的整体使用寿命。
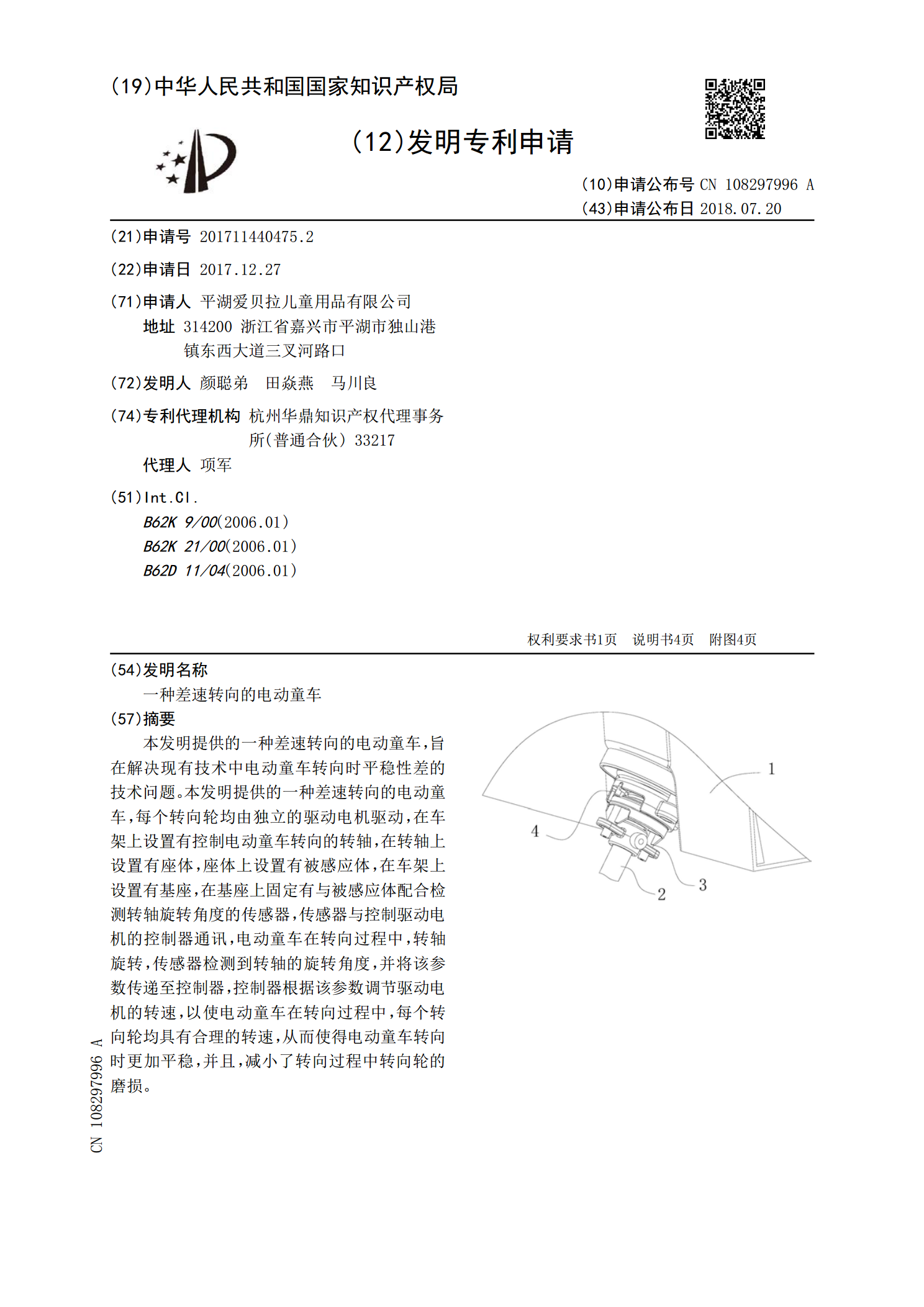
一种差速转向的电动童车.pdf
本发明提供的一种差速转向的电动童车,旨在解决现有技术中电动童车转向时平稳性差的技术问题。本发明提供的一种差速转向的电动童车,每个转向轮均由独立的驱动电机驱动,在车架上设置有控制电动童车转向的转轴,在转轴上设置有座体,座体上设置有被感应体,在车架上设置有基座,在基座上固定有与被感应体配合检测转轴旋转角度的传感器,传感器与控制驱动电机的控制器通讯,电动童车在转向过程中,转轴旋转,传感器检测到转轴的旋转角度,并将该参数传递至控制器,控制器根据该参数调节驱动电机的转速,以使电动童车在转向过程中,每个转向轮均具有合

一种差速负载转向式水上电动车.pdf
本发明提供了一种差速负载转向式水上电动车,包括车体外壳、推进系统、浮体机构、座椅,所述的推进系统用于为本水上电动车在水面进行前进转向提供动力,所述的浮体机构用于为本水上电动车在水面漂浮提供浮力,所述的座椅用于工作人员乘坐,所述的推进系统包括推进动力装置、推进涡轮装置、换向装置,所述的推进动力装置包括推进电机、差速传递机构、转轴一、转轴二,所述的推进电机用于为转轴一/转轴二提供转动动力并且转轴一/转轴二在转动动力作用下绕自身轴向转动,所述的差速传递机构用于接收推进电机的转动动力并将其传递至转轴一/转轴二,所
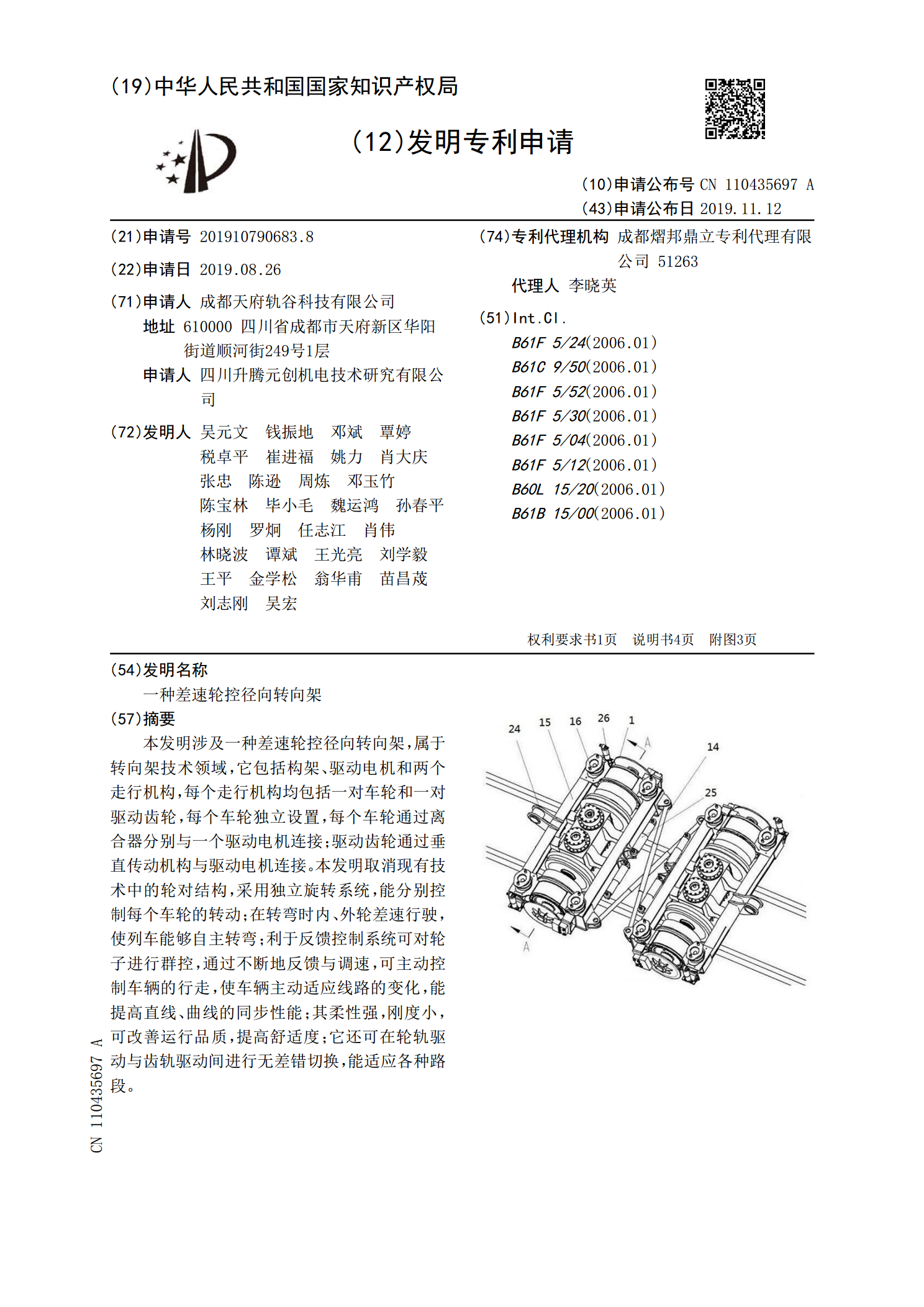
一种差速轮控径向转向架.pdf
本发明涉及一种差速轮控径向转向架,属于转向架技术领域,它包括构架、驱动电机和两个走行机构,每个走行机构均包括一对车轮和一对驱动齿轮,每个车轮独立设置,每个车轮通过离合器分别与一个驱动电机连接;驱动齿轮通过垂直传动机构与驱动电机连接。本发明取消现有技术中的轮对结构,采用独立旋转系统,能分别控制每个车轮的转动;在转弯时内、外轮差速行驶,使列车能够自主转弯;利于反馈控制系统可对轮子进行群控,通过不断地反馈与调速,可主动控制车辆的行走,使车辆主动适应线路的变化,能提高直线、曲线的同步性能;其柔性强,刚度小,可改善

一种差速转向系统及其自适应神经网络容错控制方法.pdf
本发明公开了一种差速转向系统及其自适应神经网络容错控制方法,该系统包括方向盘转角传感器、方向盘、转向管柱、齿轮齿条式转向器、四个车轮及轮毂电机、前轴、整车电子控制单元、蓄电池组、横摆角速度传感器、车速传感器、后轴和电机控制单元。在行驶过程中,整车电子控制单元实时采集方向盘转角、横摆角速度以及车速信号,计算理想横摆角速度与实际横摆角速度的差值,通过设计的自适应神经网络控制器重新计算轮毂电机输出转矩,并将此转矩信号传递到电机控制器,并由电机控制器向四个轮毂电机发送电流信号,完成轮毂电机正常与失效状况下的转向稳