
近距离障碍物的光达侦测装置及其方法.pdf

小云****66


1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
近距离障碍物的光达侦测装置及其方法.pdf
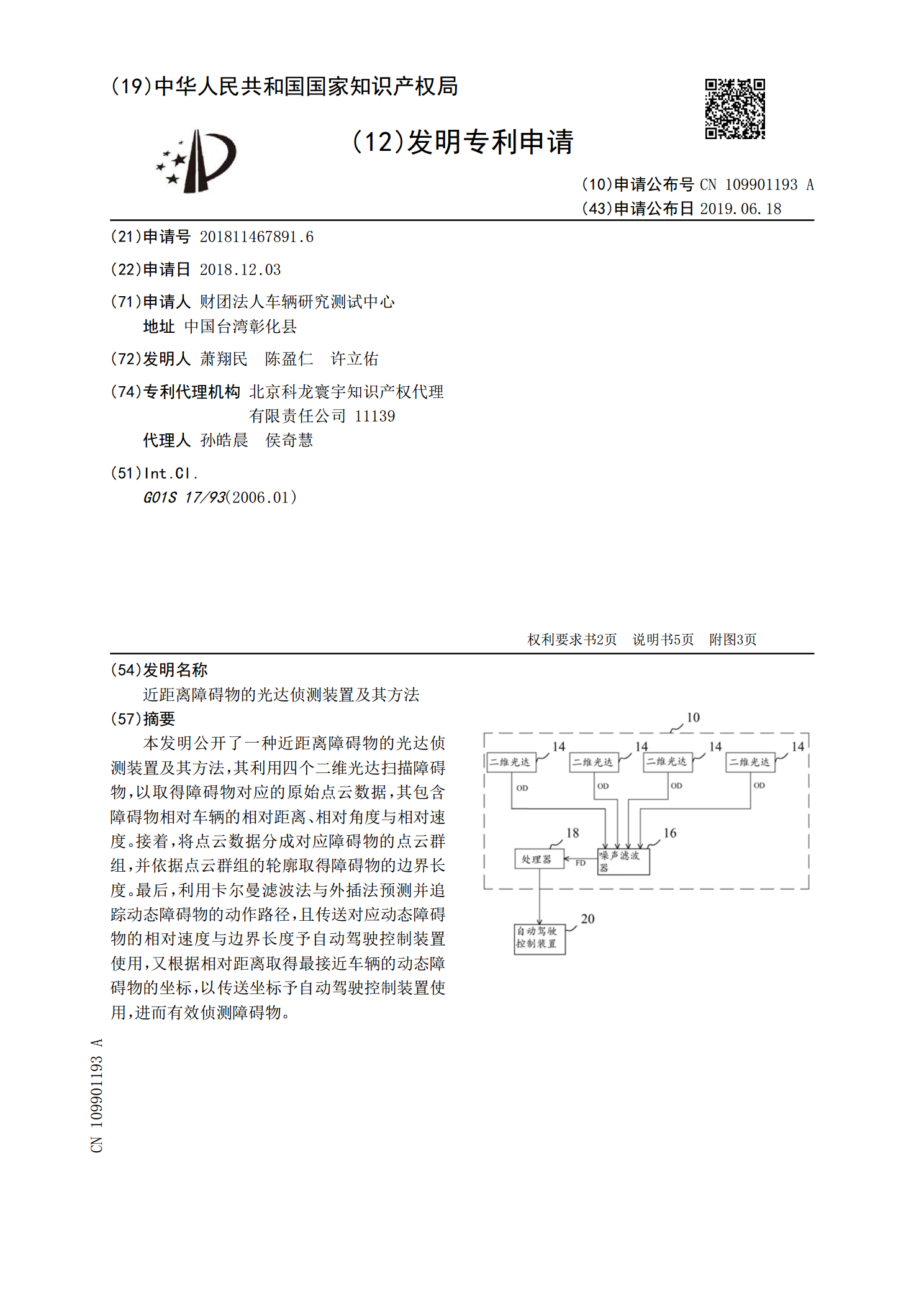
本发明公开了一种近距离障碍物的光达侦测装置及其方法,其利用四个二维光达扫描障碍物,以取得障碍物对应的原始点云数据,其包含障碍物相对车辆的相对距离、相对角度与相对速度。接着,将点云数据分成对应障碍物的点云群组,并依据点云群组的轮廓取得障碍物的边界长度。最后,利用卡尔曼滤波法与外插法预测并追踪动态障碍物的动作路径,且传送对应动态障碍物的相对速度与边界长度予自动驾驶控制装置使用,又根据相对距离取得最接近车辆的动态障碍物的坐标,以传送坐标予自动驾驶控制装置使用,进而有效侦测障碍物。

侦测装置及其方法.pdf
一种侦测装置,包括一影像输入单元、一物体侦测单元、一特征撷取单元、一存储比较单元、一特征判定单元及一控制单元,所述侦测装置通过对一侦测区域的场景拍摄,获取场景影像信号,对场景影像信号中的物体进行侦测,撷取侦测到的物体的特征信息来判定撷取的特征信息是否与存储的特征信息相同,当不相同时,赋予撷取的特征信息一新编码,并存储所述新编码及撷取的特征信息一预设时间;当相同时,用撷取的特征信息来替代存储的特征信息并保留原编码,并控制对撷取的特征信息存储所述预设时间。所述侦测装置避免了对物体的重复编码。本发明还提供一种侦

马达转速侦测方法及其装置.pdf
一种马达转速侦测方法,用于侦测一马达的转速,并由一微处理单元实施,该马达转速侦测方法包含以下步骤:(A)当接收到来自一感测单元的一包括多个脉波的脉波讯号时,根据该脉波讯号获得一相关于所述脉波的脉波数量;(B)根据该脉波讯号获得一相关于在该周期时间内所述脉波中的最后二个脉波间的脉波间隔时间,及获得一相关于在该周期时间内所述脉波中的最后一个脉波与该周期时间的一结束时间点间的结束间隔时间;及(C)至少根据该周期时间、该脉波数量、一相关于该齿轮转动一圈所需的轮齿数、该脉波间隔时间,及该结束间隔时间获得该马达的转速
车侧障碍物侦测警示方法及车侧障碍物侦测警示系统.pdf
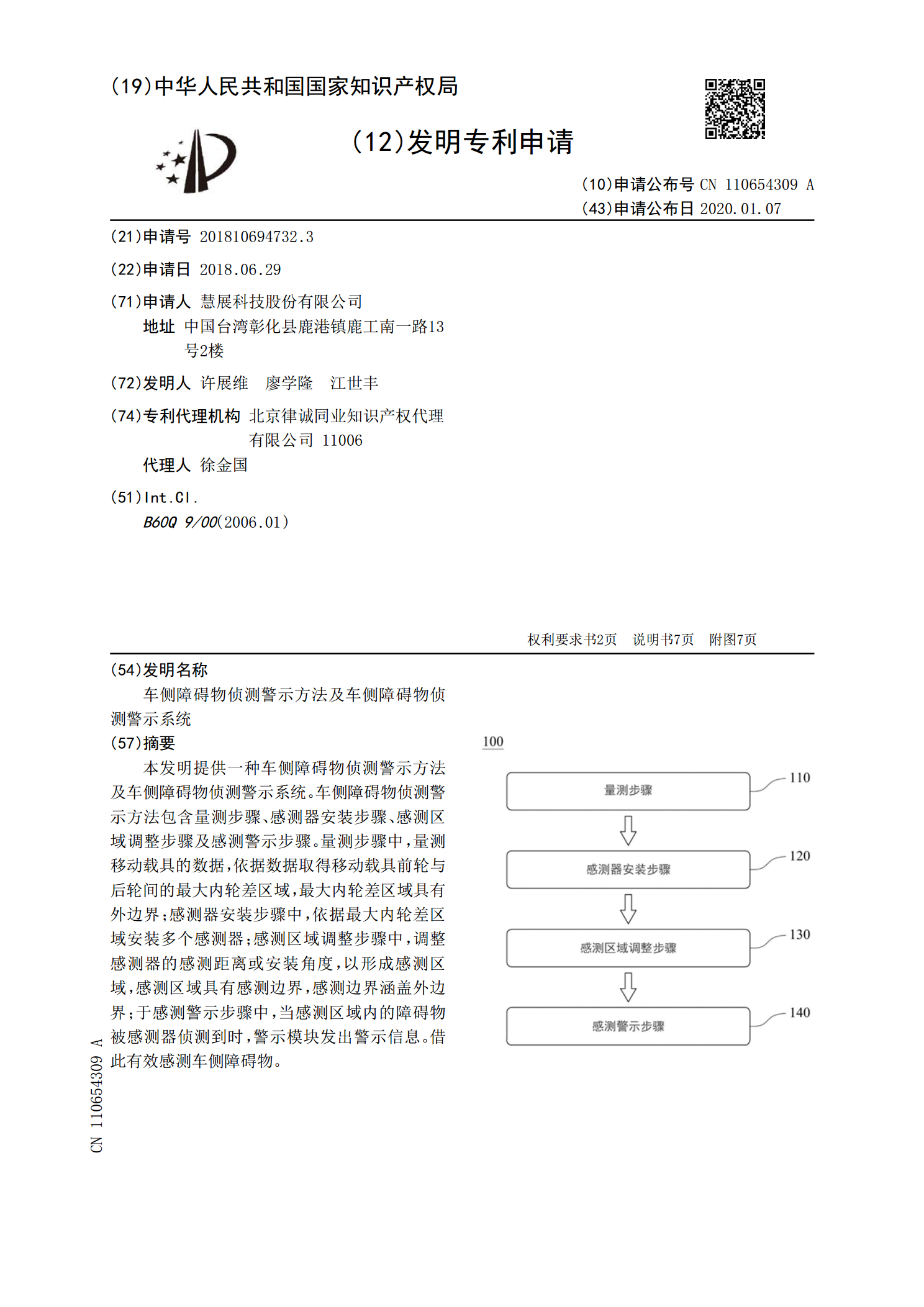
本发明提供一种车侧障碍物侦测警示方法及车侧障碍物侦测警示系统。车侧障碍物侦测警示方法包含量测步骤、感测器安装步骤、感测区域调整步骤及感测警示步骤。量测步骤中,量测移动载具的数据,依据数据取得移动载具前轮与后轮间的最大内轮差区域,最大内轮差区域具有外边界;感测器安装步骤中,依据最大内轮差区域安装多个感测器;感测区域调整步骤中,调整感测器的感测距离或安装角度,以形成感测区域,感测区域具有感测边界,感测边界涵盖外边界;于感测警示步骤中,当感测区域内的障碍物被感测器侦测到时,警示模块发出警示信息。借此有效感测车侧
一种车辆盲区侦测装置及其侦测方法.pdf
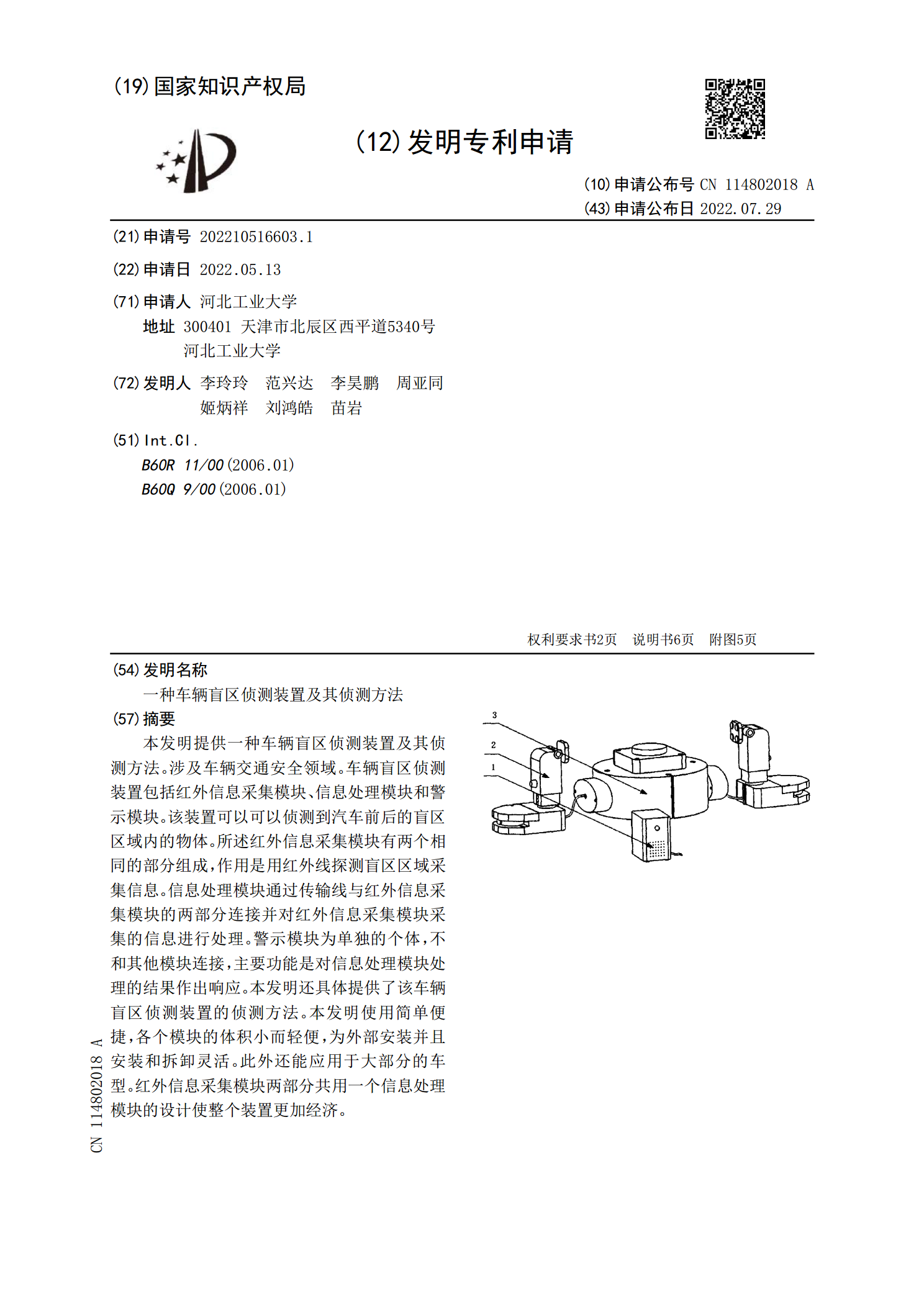
本发明提供一种车辆盲区侦测装置及其侦测方法。涉及车辆交通安全领域。车辆盲区侦测装置包括红外信息采集模块、信息处理模块和警示模块。该装置可以可以侦测到汽车前后的盲区区域内的物体。所述红外信息采集模块有两个相同的部分组成,作用是用红外线探测盲区区域采集信息。信息处理模块通过传输线与红外信息采集模块的两部分连接并对红外信息采集模块采集的信息进行处理。警示模块为单独的个体,不和其他模块连接,主要功能是对信息处理模块处理的结果作出响应。本发明还具体提供了该车辆盲区侦测装置的侦测方法。本发明使用简单便捷,各个模块的体