
一种路径优化方法、装置、设备、存储介质.pdf

小新****ou


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种路径优化方法、装置、设备、存储介质.pdf
一种路径优化方法、装置、设备、存储介质,所述方法包括步骤:生成初始路径:根据输入的若干快件信息,生成初始路径;其中,所述初始路径包括若干路径,所述路径包括若干基于对象的动作;生成中间路径:将需要变更路径的各动作中发生在相同时段、相同地理位置的同种动作打包为任务集,将任务集作为最小单元对所述初始路径进行摧毁重建,得到中间路径;优化路径:根据模拟退火算法对所述中间路线进行优化得到本轮最优路径。所述装置、设备与存储介质用于实现所述方法。它能够大大简化算法的运算过程,提高效率与速度。

一种路径规划的方法、装置、设备及存储介质.pdf
本申请公开一种路径规划的方法、装置、设备及存储介质,方法包括:确定起始位置及目标位置,获取起始位置与目标位置之间的多条移动路径;分别将各移动路径切分成路径片段,得到路径片段集合;从多条移动路径中确定最优移动路径;在目标对象按照最优移动路径移动的过程中,获取目标对象所在的实时路径片段;从路径片段集合中确定实时路径片段对应的下一路径片段集合,从下一路径片段集合中确定最优路径片段;若最优移动路径中位于实时路径片段的下一路径片段与最优路径片段不一致,则切换至最优路径片段。本申请将求取最佳移动路线问题转化为求最优路
一种路径规划方法、装置、设备及存储介质.pdf
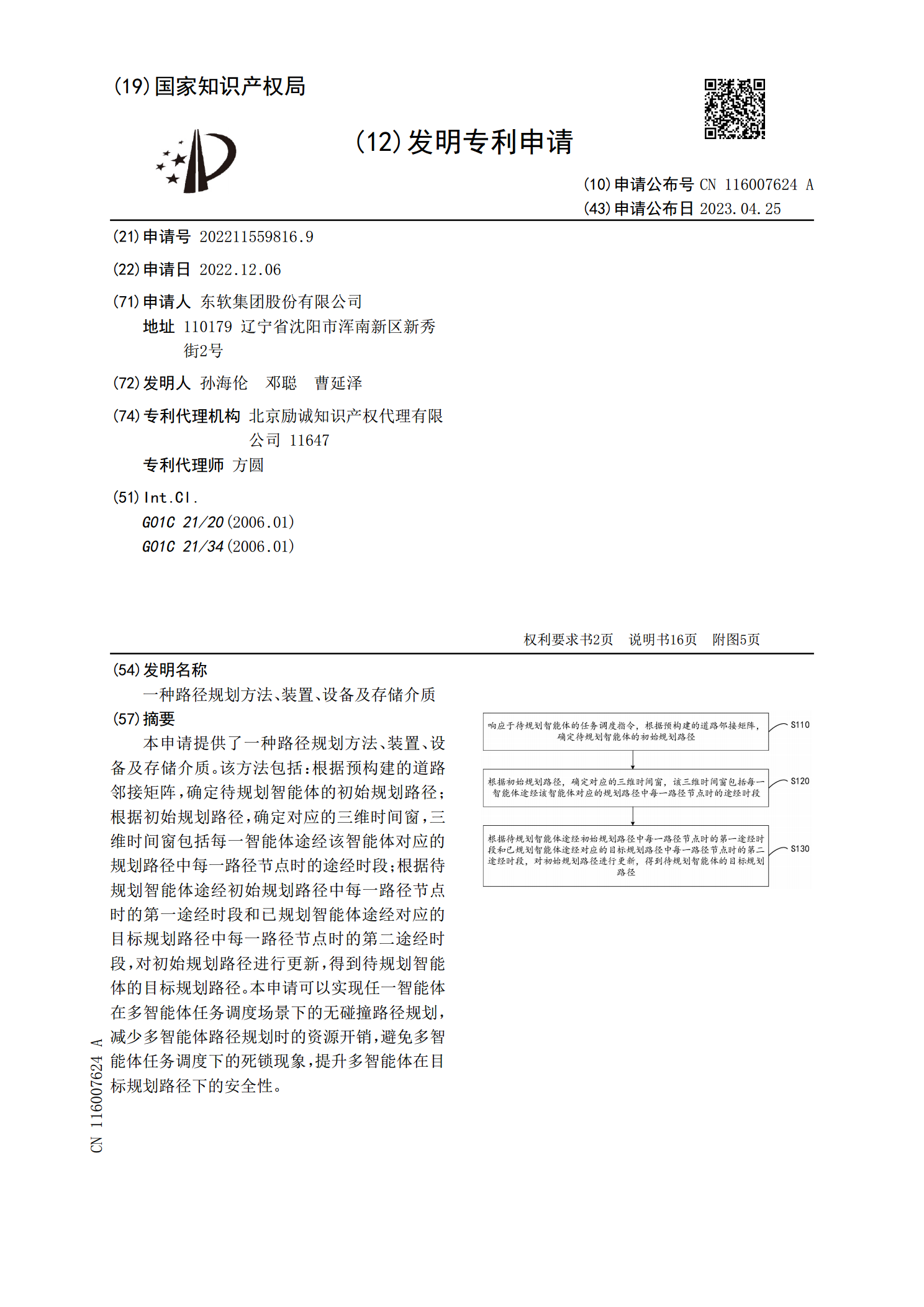
本申请提供了一种路径规划方法、装置、设备及存储介质。该方法包括:根据预构建的道路邻接矩阵,确定待规划智能体的初始规划路径;根据初始规划路径,确定对应的三维时间窗,三维时间窗包括每一智能体途经该智能体对应的规划路径中每一路径节点时的途经时段;根据待规划智能体途经初始规划路径中每一路径节点时的第一途经时段和已规划智能体途经对应的目标规划路径中每一路径节点时的第二途经时段,对初始规划路径进行更新,得到待规划智能体的目标规划路径。本申请可以实现任一智能体在多智能体任务调度场景下的无碰撞路径规划,减少多智能体路径规
一种路径规划方法、装置、设备及存储介质.pdf
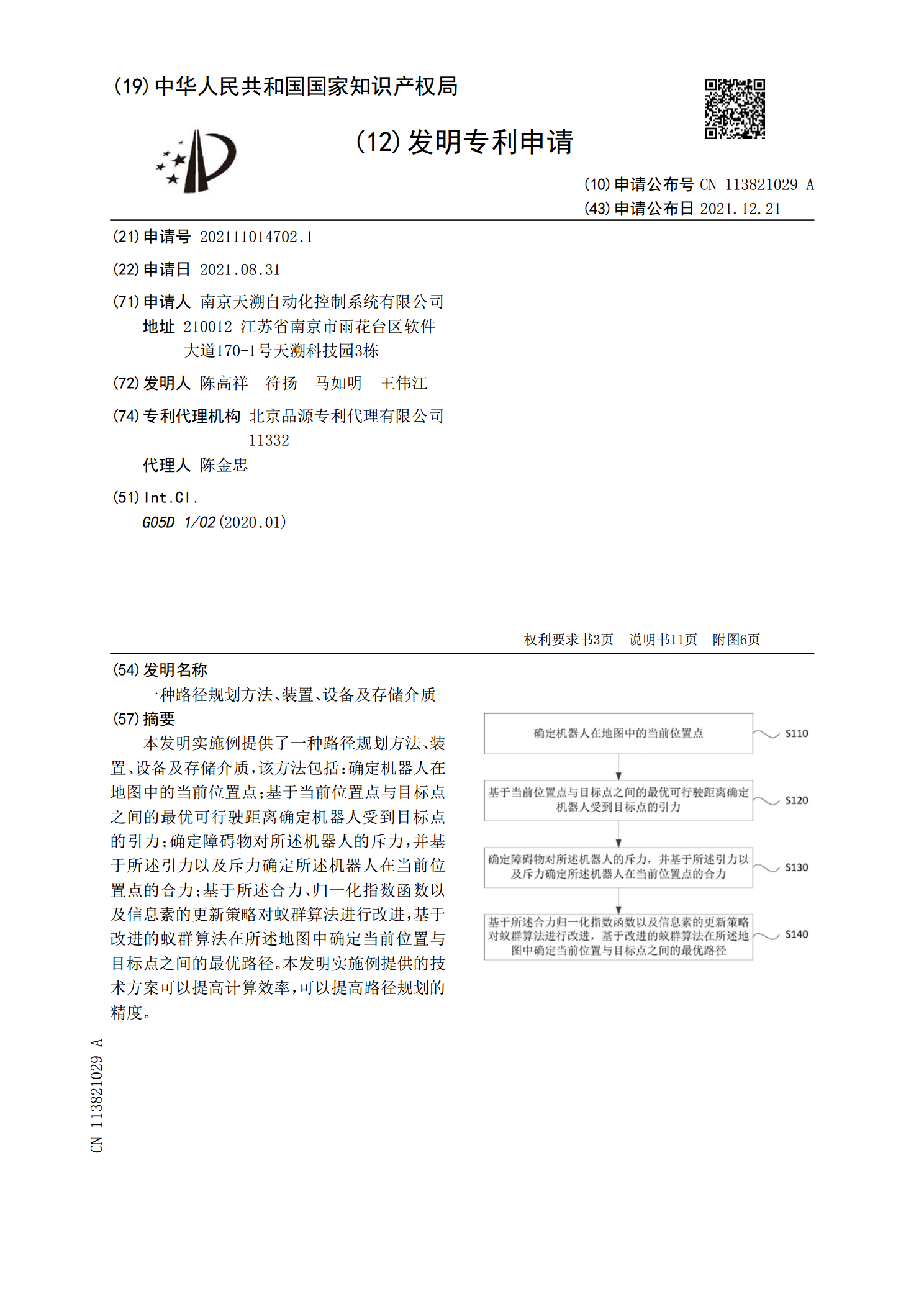
本发明实施例提供了一种路径规划方法、装置、设备及存储介质,该方法包括:确定机器人在地图中的当前位置点;基于当前位置点与目标点之间的最优可行驶距离确定机器人受到目标点的引力;确定障碍物对所述机器人的斥力,并基于所述引力以及斥力确定所述机器人在当前位置点的合力;基于所述合力、归一化指数函数以及信息素的更新策略对蚁群算法进行改进,基于改进的蚁群算法在所述地图中确定当前位置与目标点之间的最优路径。本发明实施例提供的技术方案可以提高计算效率,可以提高路径规划的精度。

一种路径规划优化方法、装置、计算机设备及存储介质.pdf
本发明公开了一种路径规划优化方法、装置、计算机设备及存储介质。该方法包括:确认出发点单元格、目标点单元格和障碍物单元格;设定向量方向和沿不同向量方向移动的向量增减值关系;根据设定的向量方向和向量增减值关系,分别计算出发点单元格移动至每个方向的下一单元格的单元格值,并筛选最大的单元格值对应的单元格作为实际移动的下一单元格;根据预设的判定关系,当判定当前点单元格为目标点单元格时完成路径规划。本发明对广度优先方法进行优化,在运算能力不足的情况下实现了出发点至目标点的路径规划功能,具有节约算力的优点。