
一种堆垛机及其使用方法.pdf

明钰****甜甜


1/8

2/8
3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种堆垛机及其使用方法.pdf
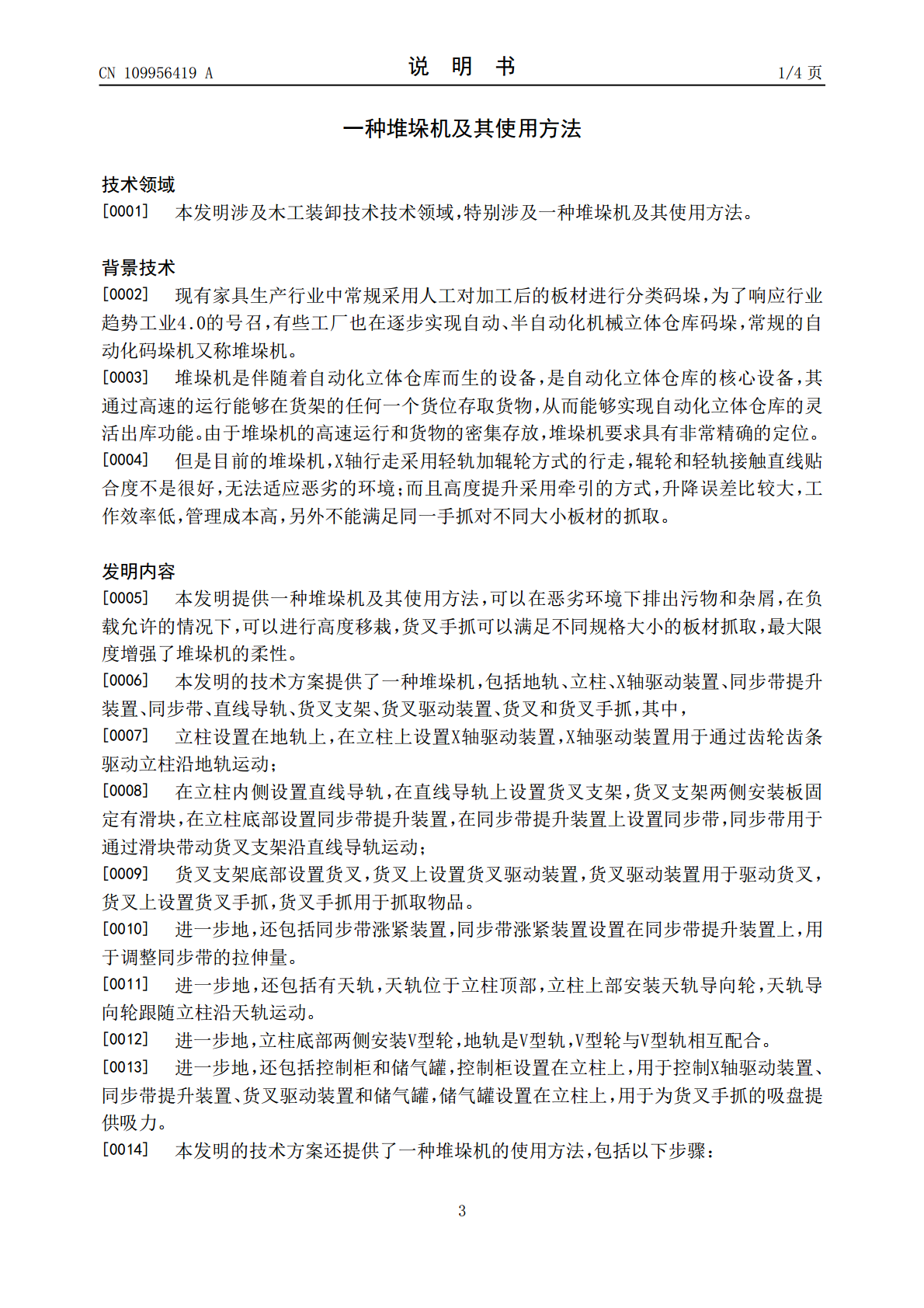
本发明公开了一种堆垛机及其使用方法,该堆垛机的立柱设置在地轨上,在立柱上设置X轴驱动装置,X轴驱动装置通过齿轮齿条驱动立柱沿地轨运动;在立柱内侧设置直线导轨,在直线导轨上设置货叉支架,货叉支架两侧安装板固定有滑块,在立柱底部设置同步带提升装置,在同步带提升装置上设置同步带,同步带通过滑块带动货叉支架沿直线导轨运动;货叉支架底部设置货叉,货叉上设置货叉驱动装置,货叉驱动装置驱动货叉,货叉上设置货叉手抓,货叉手抓抓取物品。采用了本发明的技术方案,可以在恶劣环境下排出污物和杂屑,在负载允许的情况下,可以进行高度

一种堆垛机的悬垂补偿系统及其使用方法.pdf
本发明公开一种堆垛机的悬垂补偿系统及其使用方法,包括所述货叉托架、货叉支撑架、伸缩式货叉、激光测距仪、激光测距仪支架、调整油缸、调整油缸油管、活塞位置光栅尺、第一调整油缸支撑关节、第二调整油缸支撑关节、伺服电动推缸、伺服液压平衡器、光感读数尺、电子水平仪。本发明通过执行单元和测量单元,对物料自动搬运最终输出端的变形量进行数据采集和分析,通过伺服系统对物料自动搬运最终输出端的变形量进行补偿调整,达到物料最终以水平姿态精确定位,完成物料的高精度流转。

一种双轨调度式真空堆垛机及其使用方法.pdf
本发明提供了一种双轨调度式真空堆垛机及其使用方法,包括下轨道和上轨道,下轨道的内部滑动安装有一对滑块,滑块的顶端均固定安装有第一伸缩杆,一对第一伸缩杆的顶端安装有堆垛机本体,上轨道的内部设有一对移动机构,一对移动机构的底端均与堆垛机本体的顶端固定连接,上轨道与下轨道的形状相同,移动机构包括底座,底座的两侧转动插设有连接轴,一对连接轴的两端均套装有第一移动轮,底座的内部中心处固定安装有电机,电机的一侧输出端套装有第一同步轮,利用移动机构的横向和纵向移动,使得堆垛机本体在巷道内部进行运送货物时,可以进行横向和
一种堆垛机总成及其堆垛方法.pdf
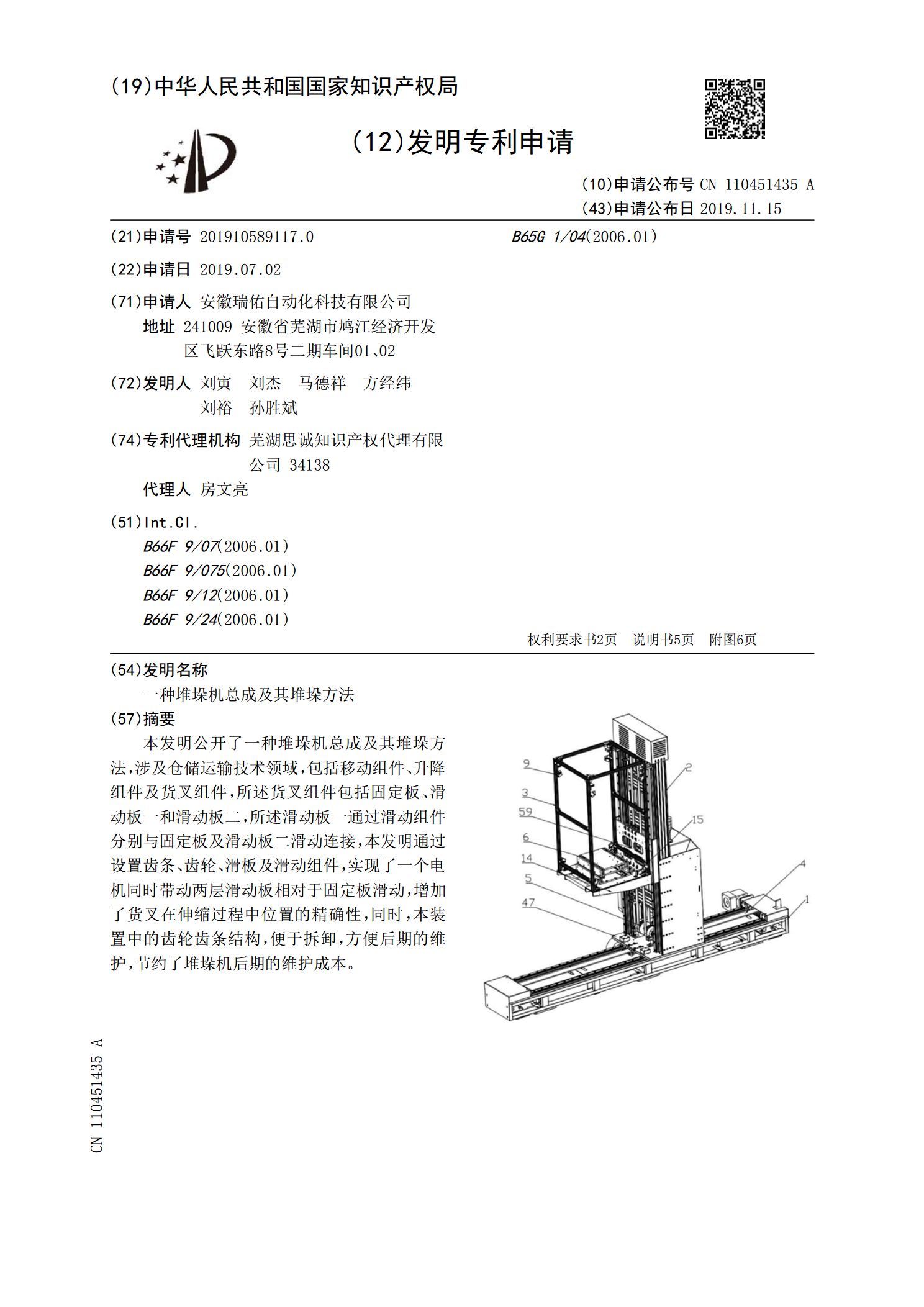
本发明公开了一种堆垛机总成及其堆垛方法,涉及仓储运输技术领域,包括移动组件、升降组件及货叉组件,所述货叉组件包括固定板、滑动板一和滑动板二,所述滑动板一通过滑动组件分别与固定板及滑动板二滑动连接,本发明通过设置齿条、齿轮、滑板及滑动组件,实现了一个电机同时带动两层滑动板相对于固定板滑动,增加了货叉在伸缩过程中位置的精确性,同时,本装置中的齿轮齿条结构,便于拆卸,方便后期的维护,节约了堆垛机后期的维护成本。
一种防爆堆垛机及其防爆堆垛方法.pdf
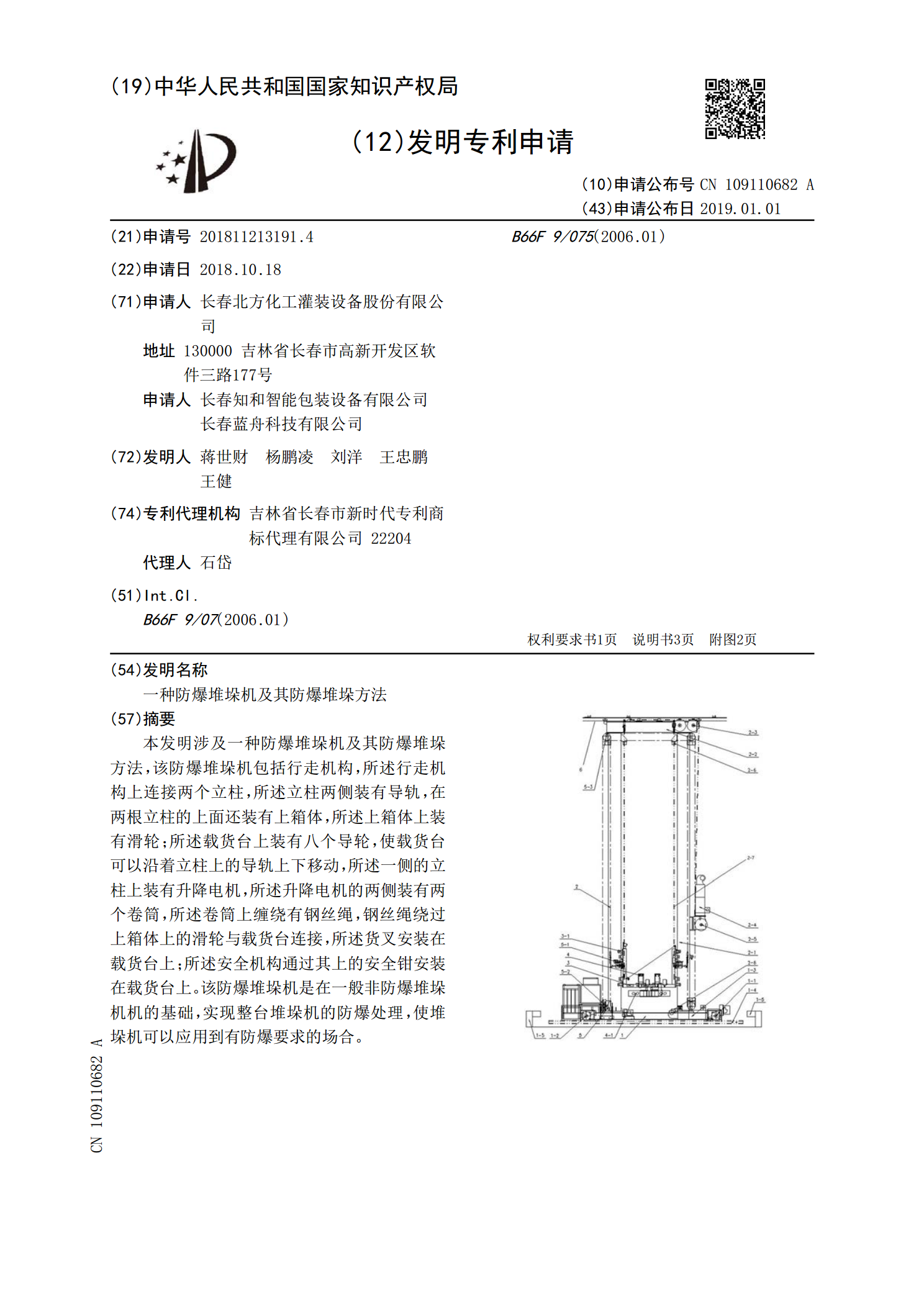
本发明涉及一种防爆堆垛机及其防爆堆垛方法,该防爆堆垛机包括行走机构,所述行走机构上连接两个立柱,所述立柱两侧装有导轨,在两根立柱的上面还装有上箱体,所述上箱体上装有滑轮;所述载货台上装有八个导轮,使载货台可以沿着立柱上的导轨上下移动,所述一侧的立柱上装有升降电机,所述升降电机的两侧装有两个卷筒,所述卷筒上缠绕有钢丝绳,钢丝绳绕过上箱体上的滑轮与载货台连接,所述货叉安装在载货台上;所述安全机构通过其上的安全钳安装在载货台上。该防爆堆垛机是在一般非防爆堆垛机机的基础,实现整台堆垛机的防爆处理,使堆垛机可以应用