
用于车门的门把手装置.pdf

康佳****文库


1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共43页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于车门的门把手装置.pdf
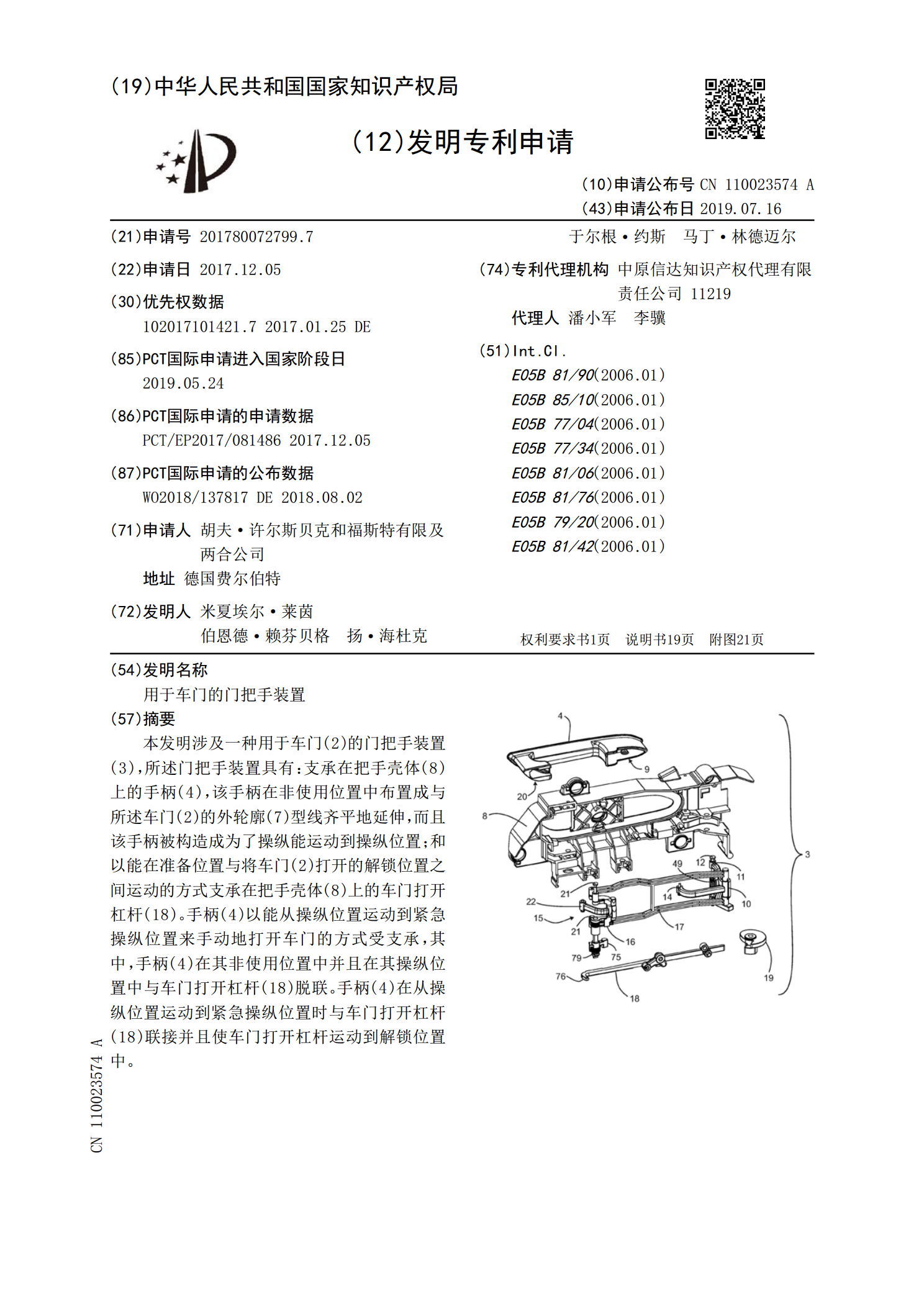
本发明涉及一种用于车门(2)的门把手装置(3),所述门把手装置具有:支承在把手壳体(8)上的手柄(4),该手柄在非使用位置中布置成与所述车门(2)的外轮廓(7)型线齐平地延伸,而且该手柄被构造成为了操纵能运动到操纵位置;和以能在准备位置与将车门(2)打开的解锁位置之间运动的方式支承在把手壳体(8)上的车门打开杠杆(18)。手柄(4)以能从操纵位置运动到紧急操纵位置来手动地打开车门的方式受支承,其中,手柄(4)在其非使用位置中并且在其操纵位置中与车门打开杠杆(18)脱联。手柄(4)在从操纵位置运动到紧急操纵
用于车门的门把手装置.pdf
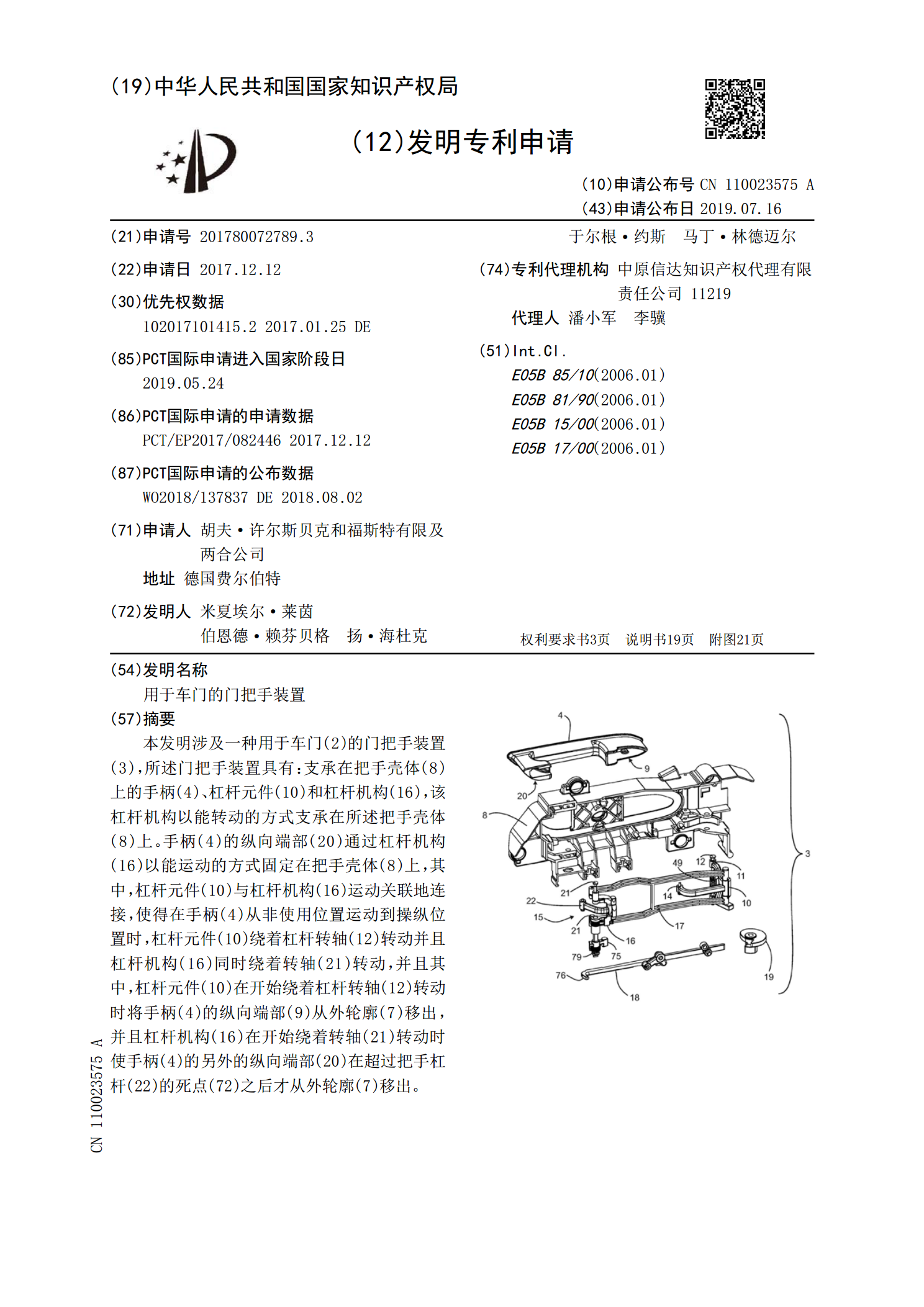
本发明涉及一种用于车门(2)的门把手装置(3),所述门把手装置具有:支承在把手壳体(8)上的手柄(4)、杠杆元件(10)和杠杆机构(16),该杠杆机构以能转动的方式支承在所述把手壳体(8)上。手柄(4)的纵向端部(20)通过杠杆机构(16)以能运动的方式固定在把手壳体(8)上,其中,杠杆元件(10)与杠杆机构(16)运动关联地连接,使得在手柄(4)从非使用位置运动到操纵位置时,杠杆元件(10)绕着杠杆转轴(12)转动并且杠杆机构(16)同时绕着转轴(21)转动,并且其中,杠杆元件(10)在开始绕着杠杆转轴

用于车门的门把手装置.pdf
本发明涉及一种用于车门(2)的门把手装置(3),所述门把手装置具有:支承在把手壳体(8)上的手柄(4),该手柄在非使用位置中布置成与所述车门(2)的外轮廓(7)型线齐平地延伸,而且该手柄被构造成能运动到操纵位置以供操作者操纵;杠杆元件(10),杠杆元件的第一杠杆端部(11)以能转动的方式安装在支承于把手壳体(8)上的杠杆转轴(12)上,而杠杆元件的第二杠杆端部(14)以能转动的方式与手柄(4)的第一纵向端部(9)连接;和马达驱动的调节元件(19),马达驱动的调节元件使杠杆元件(10)绕着杠杆转轴(12)转
汽车门把手检测装置.pdf
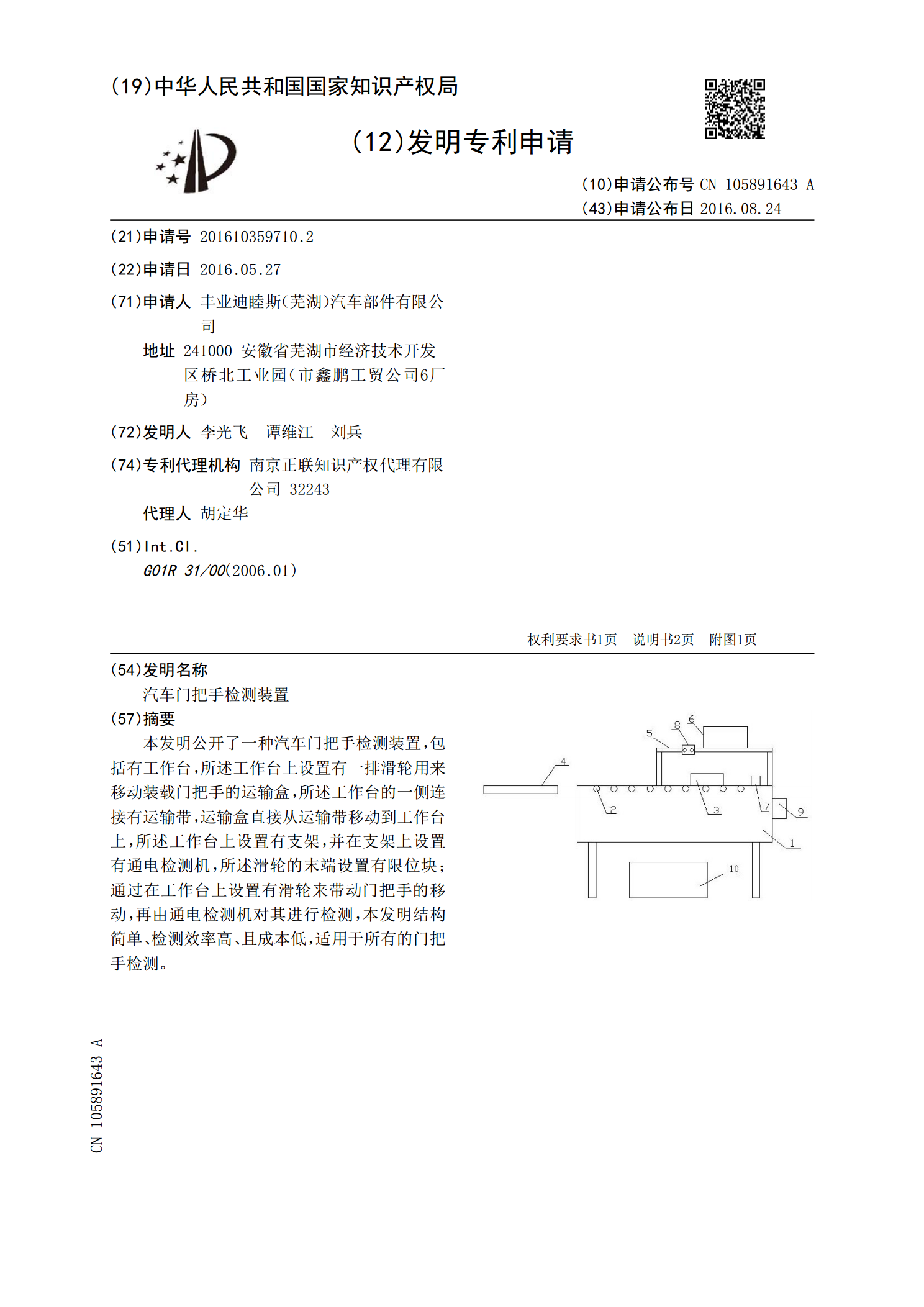
本发明公开了一种汽车门把手检测装置,包括有工作台,所述工作台上设置有一排滑轮用来移动装载门把手的运输盒,所述工作台的一侧连接有运输带,运输盒直接从运输带移动到工作台上,所述工作台上设置有支架,并在支架上设置有通电检测机,所述滑轮的末端设置有限位块;通过在工作台上设置有滑轮来带动门把手的移动,再由通电检测机对其进行检测,本发明结构简单、检测效率高、且成本低,适用于所有的门把手检测。

用于车辆车门的门把手组件.pdf
本发明涉及汽车把手领域,具体为一种用于车辆车门把手组件。一种用于车辆车门的把手组件,具有支架,所述支架被固定在所述车门的内侧,设置在所述车门外侧的把手体,所述把手体具有第一端部和第二端部,其中所述第一端部从车门外侧穿过车门外壳的开口设置在所述支架上,所述第二端部从车门外侧穿过车门外壳的开口可枢转地设置在所述支架上,所述第二端部包括带有弯曲部分的支承臂,其特征是:所述支架内设置有圆弧形引导轨,所述第二端部的支承臂能够绕所述圆弧形引导轨的圆心可枢转地在所述支架内滑动。本发明使得车门把手组件在枢转时不会与车门外