
臂架末端软管牵引装置、控制方法、软体机器人及混凝土泵送设备.pdf

骊英****bb


1/8

2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
臂架末端软管牵引装置、控制方法、软体机器人及混凝土泵送设备.pdf
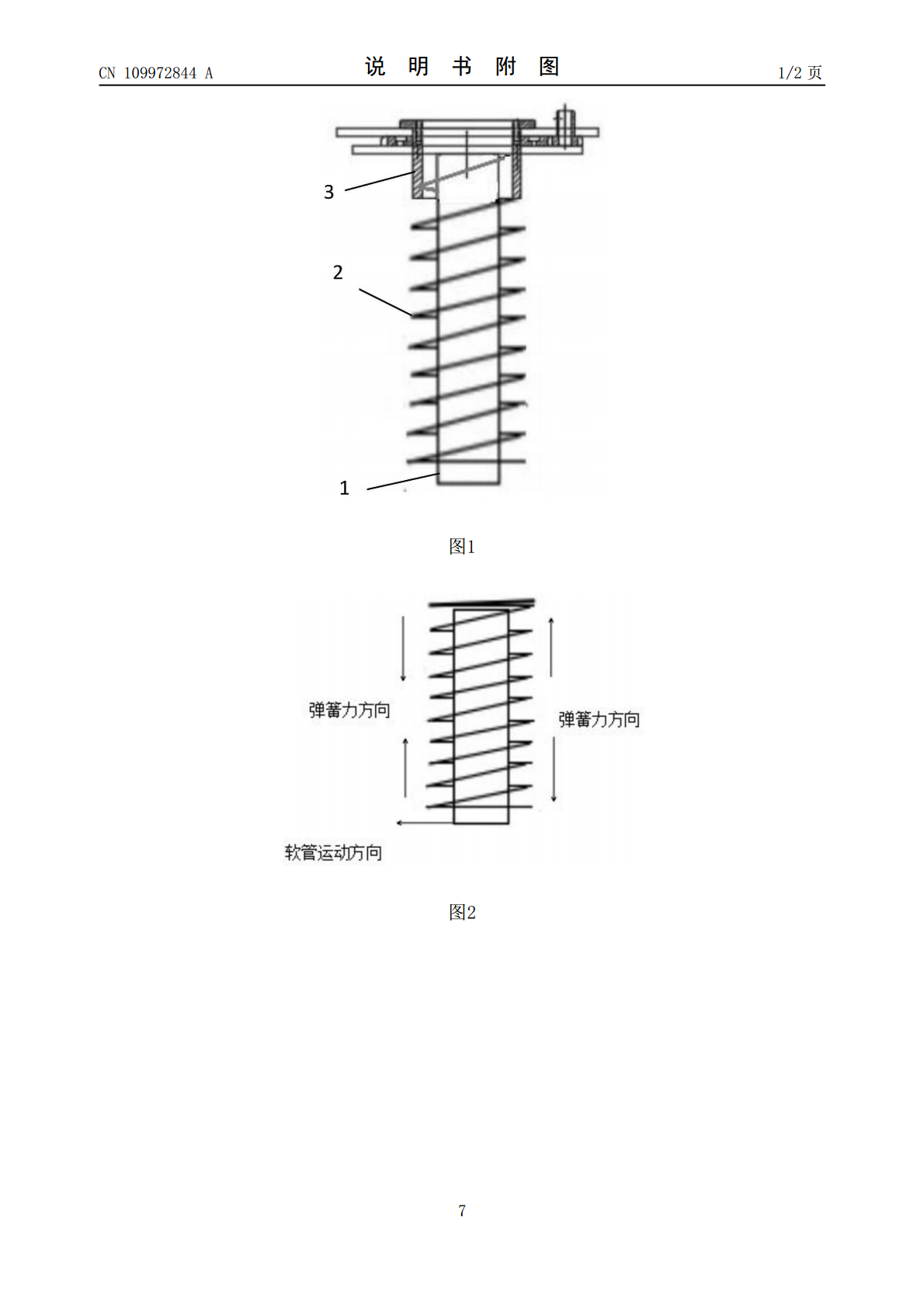
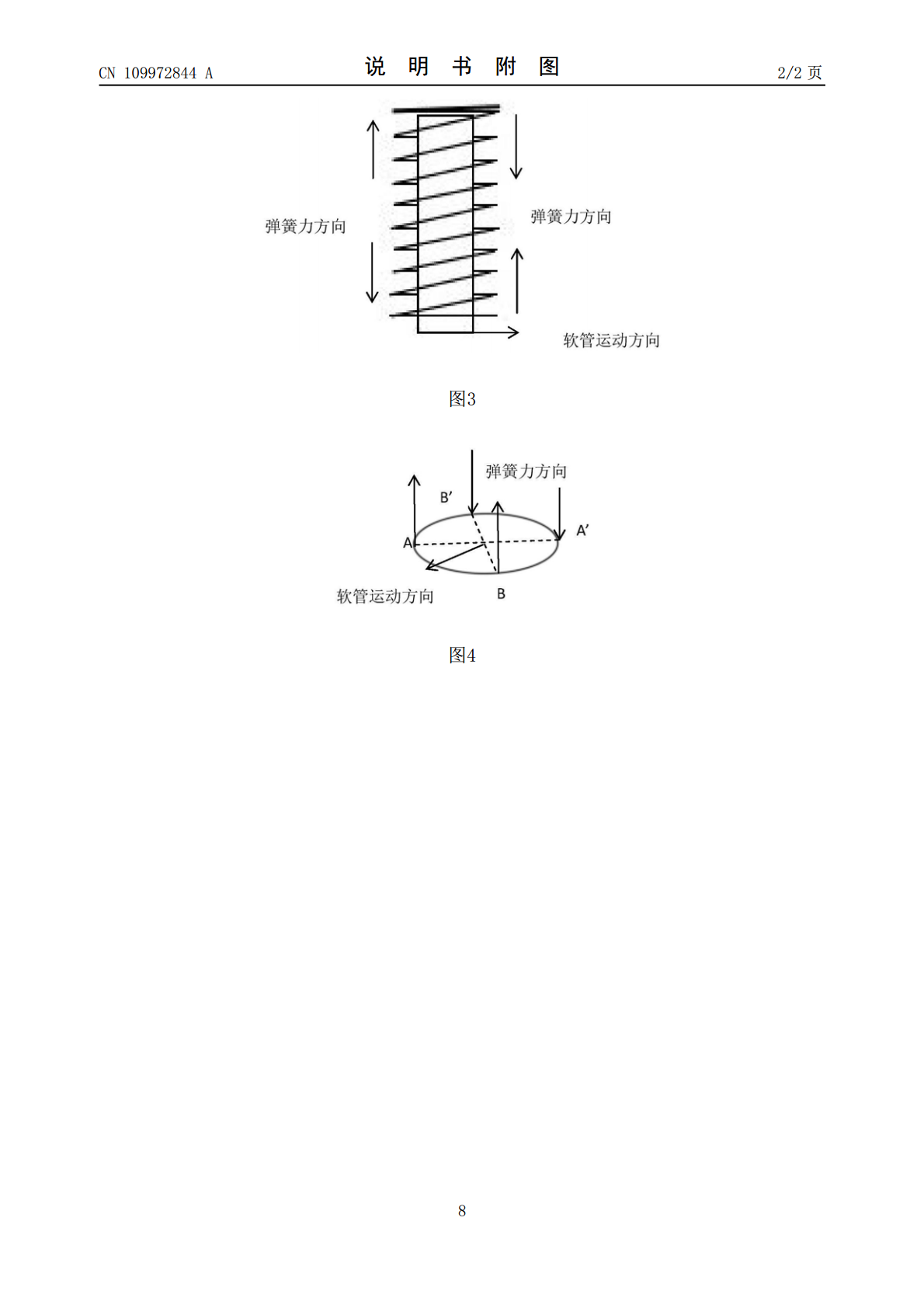
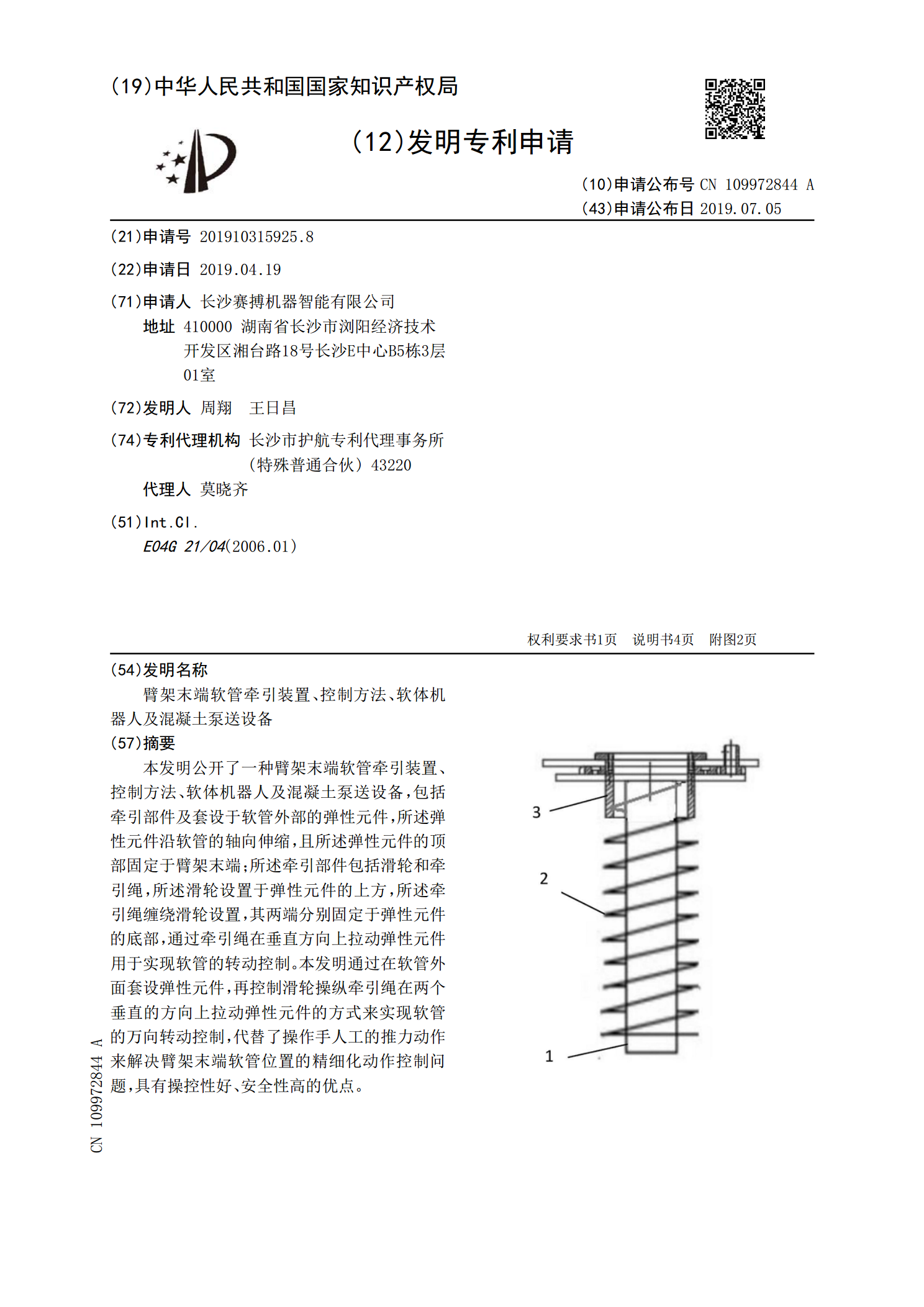
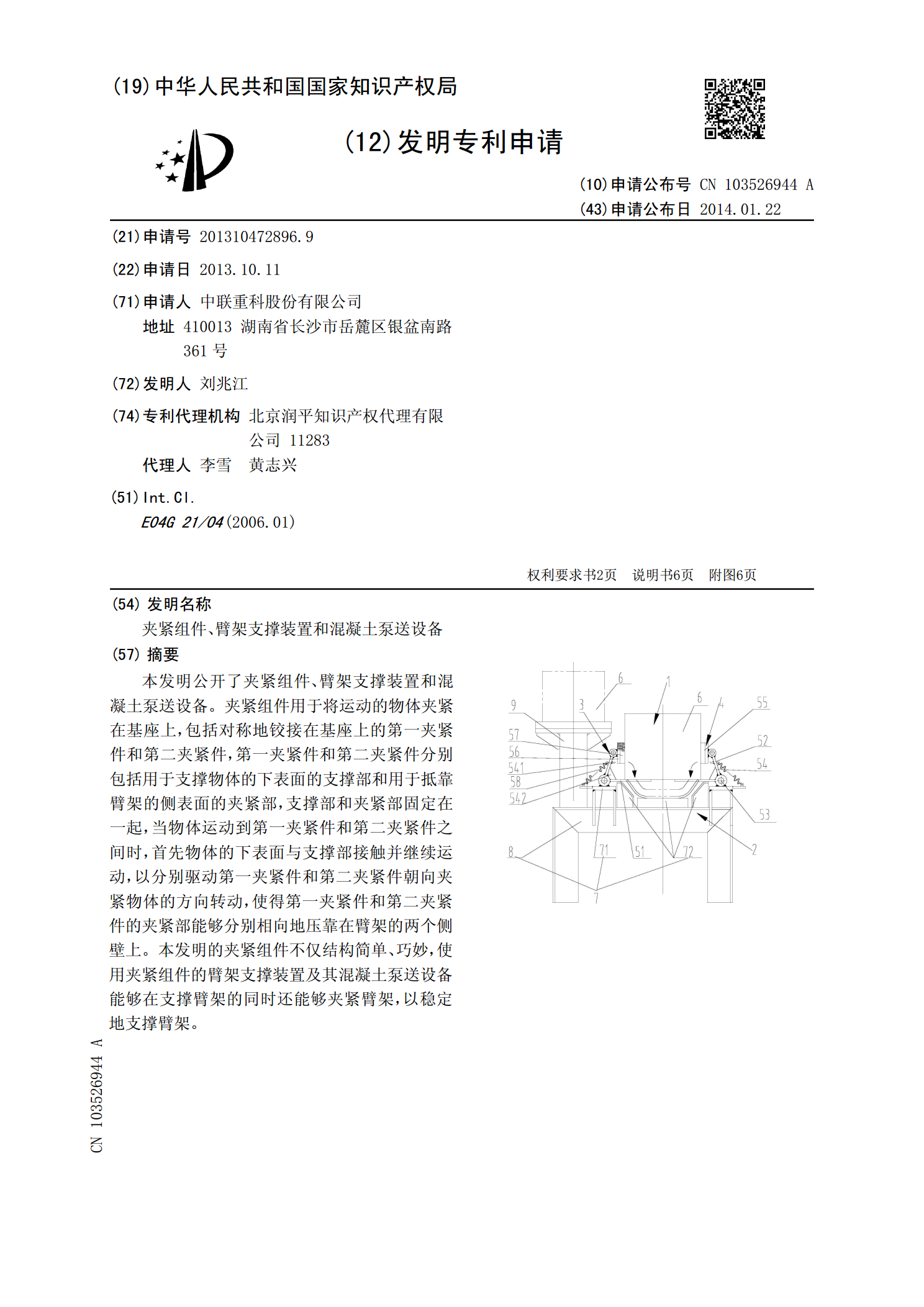
本发明公开了一种臂架末端软管牵引装置、控制方法、软体机器人及混凝土泵送设备,包括牵引部件及套设于软管外部的弹性元件,所述弹性元件沿软管的轴向伸缩,且所述弹性元件的顶部固定于臂架末端;所述牵引部件包括滑轮和牵引绳,所述滑轮设置于弹性元件的上方,所述牵引绳缠绕滑轮设置,其两端分别固定于弹性元件的底部,通过牵引绳在垂直方向上拉动弹性元件用于实现软管的转动控制。本发明通过在软管外面套设弹性元件,再控制滑轮操纵牵引绳在两个垂直的方向上拉动弹性元件的方式来实现软管的万向转动控制,代替了操作手人工的推力动作来解决臂架末
夹紧组件、臂架支撑装置和混凝土泵送设备.pdf
本发明公开了夹紧组件、臂架支撑装置和混凝土泵送设备。夹紧组件用于将运动的物体夹紧在基座上,包括对称地铰接在基座上的第一夹紧件和第二夹紧件,第一夹紧件和第二夹紧件分别包括用于支撑物体的下表面的支撑部和用于抵靠臂架的侧表面的夹紧部,支撑部和夹紧部固定在一起,当物体运动到第一夹紧件和第二夹紧件之间时,首先物体的下表面与支撑部接触并继续运动,以分别驱动第一夹紧件和第二夹紧件朝向夹紧物体的方向转动,使得第一夹紧件和第二夹紧件的夹紧部能够分别相向地压靠在臂架的两个侧壁上。本发明的夹紧组件不仅结构简单、巧妙,使用夹紧组

一种臂架结构、臂架装置及混凝土泵车.pdf
本发明提供了一种臂架结构,其包括通过转轴连接的第一臂段和第二臂段,转轴与该臂架结构端部的铰接轴线垂直设置,驱动装置和第一传动轮安装于第一臂段,第二传动轮可转动地安装于转轴,第二臂段与第二传动轮固定连接,在第一传动轮和第二传动轮上安装有传动机构,驱动装置驱动第一传动轮转动,第一传动轮通过传动机构带动第二传动轮及第二臂段绕转轴转动。本发明还提供了一种臂架装置及一种混凝土泵车。通过本发明提供的技术方案,实现了臂架水平转动的功能,增加了布料的灵活性。

空间约束下多关节机械臂架末端柔顺控制方法.docx
空间约束下多关节机械臂架末端柔顺控制方法1.内容综述随着空间探索和技术的发展,多关节机械臂在空间任务中扮演着越来越重要的角色。由于空间环境的复杂性和不确定性,传统的刚性控制方法难以满足高精度和高稳定性的要求。研究空间约束下多关节机械臂架末端柔顺控制方法具有重要的理论意义和实际应用价值。柔性控制理论得到了广泛关注和发展,成为解决柔性机械系统控制问题的有效手段。柔顺控制方法通过引入柔性模型,将系统的不确定性纳入控制策略中,从而有效地减小误差和提高系统性能。在空间约束环境下,机械臂的柔顺控制仍面临诸多挑战。空间
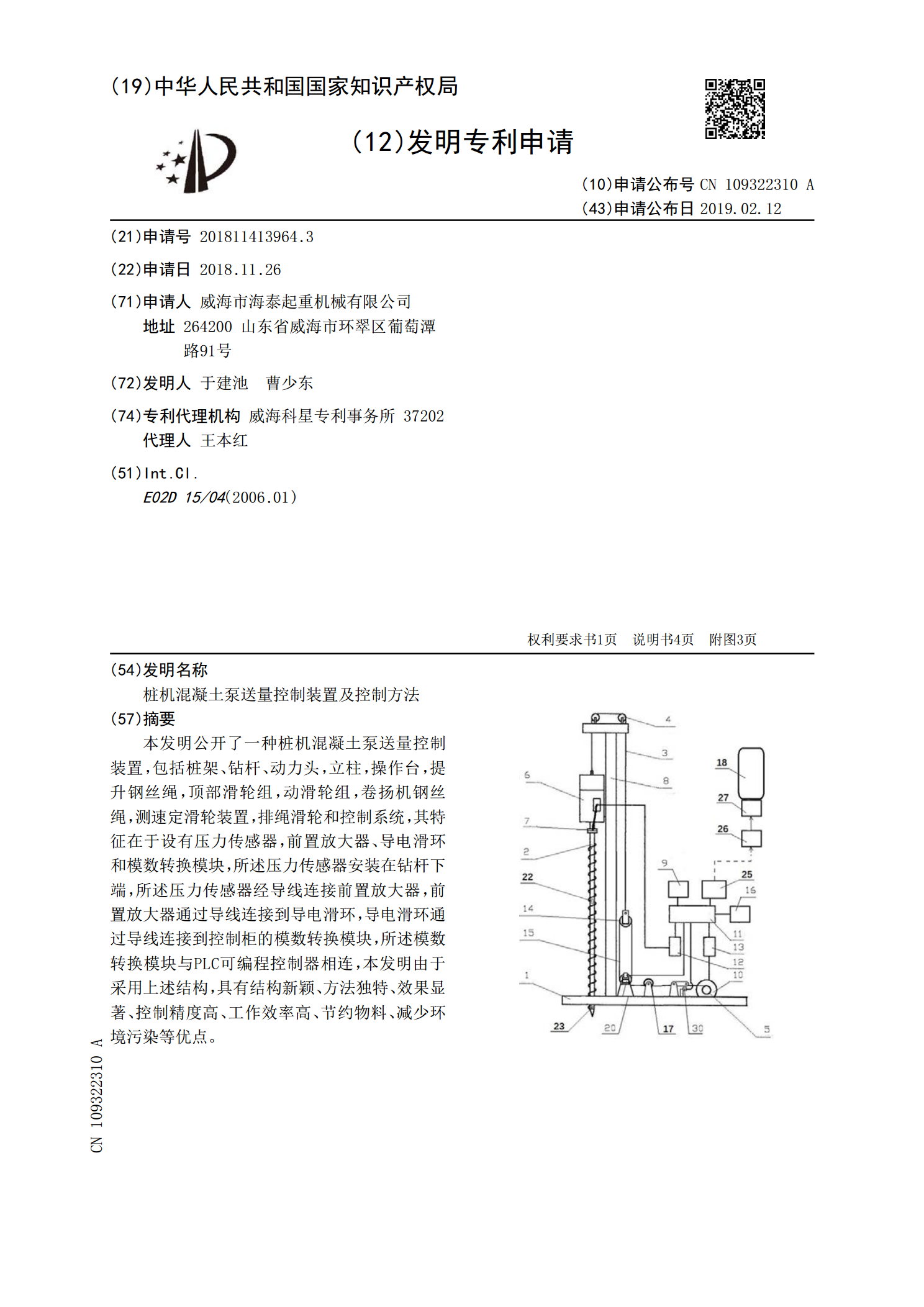
桩机混凝土泵送量控制装置及控制方法.pdf
本发明公开了一种桩机混凝土泵送量控制装置,包括桩架、钻杆、动力头,立柱,操作台,提升钢丝绳,顶部滑轮组,动滑轮组,卷扬机钢丝绳,测速定滑轮装置,排绳滑轮和控制系统,其特征在于设有压力传感器,前置放大器、导电滑环和模数转换模块,所述压力传感器安装在钻杆下端,所述压力传感器经导线连接前置放大器,前置放大器通过导线连接到导电滑环,导电滑环通过导线连接到控制柜的模数转换模块,所述模数转换模块与PLC可编程控制器相连,本发明由于采用上述结构,具有结构新颖、方法独特、效果显著、控制精度高、工作效率高、节约物料、减少环