
基于轮胎状态信息的车辆安全控制方法及车辆.pdf

书錦****by


1/10

2/10
3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于轮胎状态信息的车辆安全控制方法及车辆.pdf
本发明公开了一种基于轮胎状态信息的车辆安全控制方法及车辆,该方法包括:根据轮胎在不同路况时的附着系数和滑移率之间的附着滑移曲线及滑移斜率确定参考直线;根据轮胎当前的滑移斜率及轮胎状态信息计算附着系数,并将所述附着系数及所述滑移斜率作为数据点的坐标;在所述参考直线上选取预定数量参考点,计算各参考点和所述数据点之间的相似度;根据所述各参考点和所述数据点之间的相似度计算该数据点对应的最大附着系数,以将所述最大附着系数作为控制参数对车辆进行控制。本发明技术方案通过实时精准的计算车辆中各轮胎的最大附着系数,以得到最
用于车辆调节系统的控制装置和用于确定车辆轮胎的轮胎状态的方法.pdf
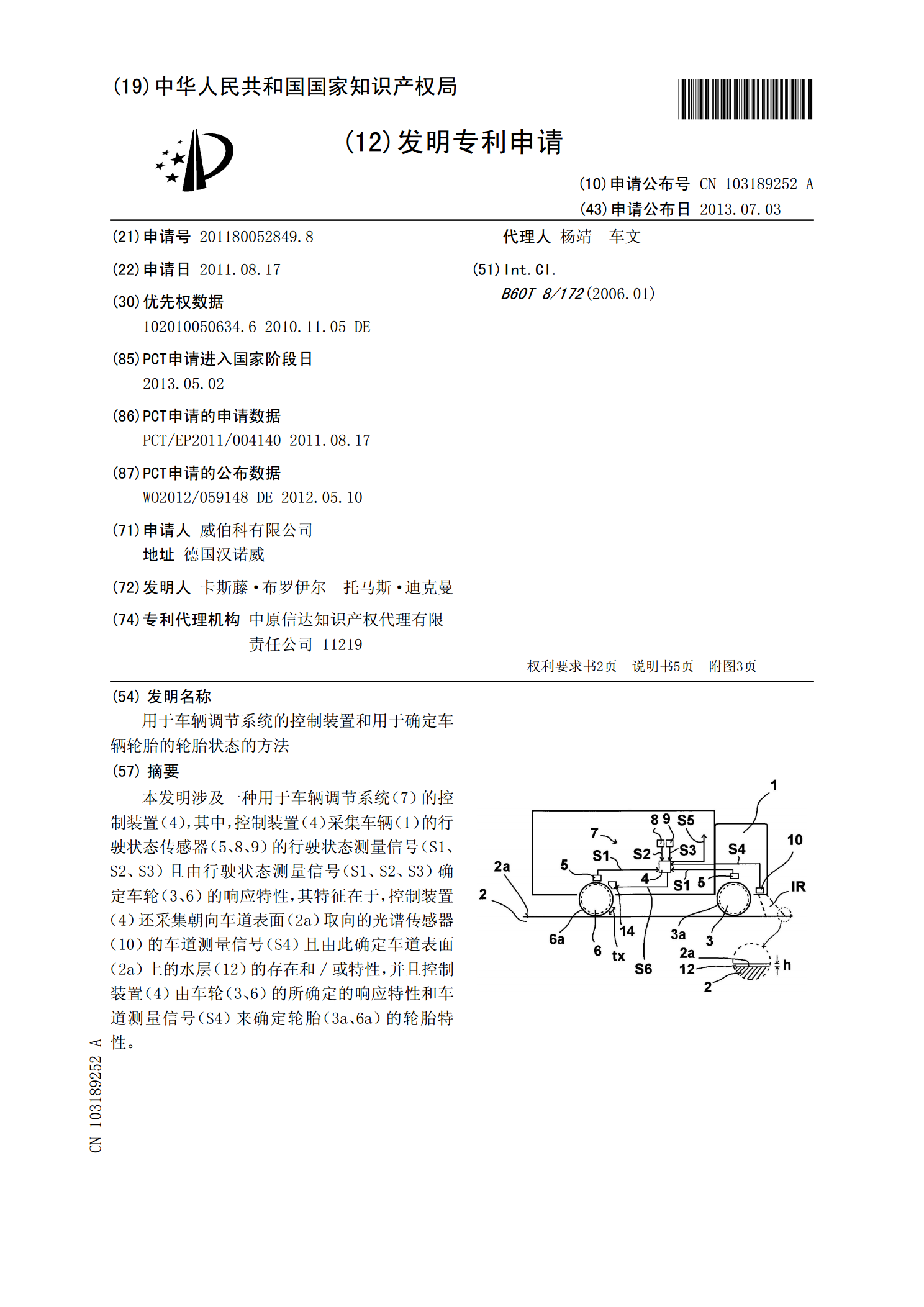
本发明涉及一种用于车辆调节系统(7)的控制装置(4),其中,控制装置(4)采集车辆(1)的行驶状态传感器(5、8、9)的行驶状态测量信号(S1、S2、S3)且由行驶状态测量信号(S1、S2、S3)确定车轮(3、6)的响应特性,其特征在于,控制装置(4)还采集朝向车道表面(2a)取向的光谱传感器(10)的车道测量信号(S4)且由此确定车道表面(2a)上的水层(12)的存在和/或特性,并且控制装置(4)由车轮(3、6)的所确定的响应特性和车道测量信号(S4)来确定轮胎(3a、6a)的轮胎特性。
车辆的行驶状态控制装置以及车辆的行驶状态控制方法.pdf
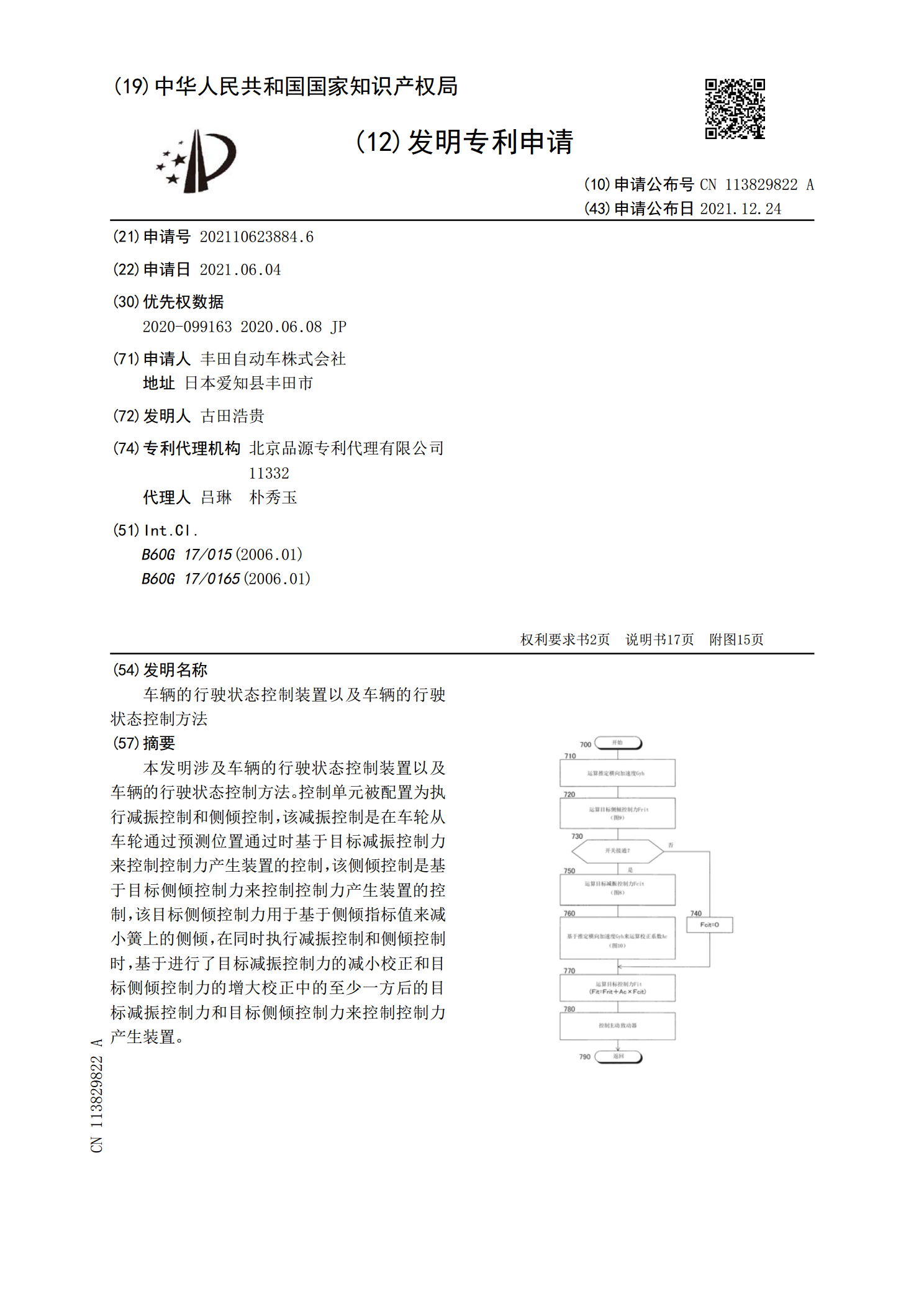
本发明涉及车辆的行驶状态控制装置以及车辆的行驶状态控制方法。控制单元被配置为执行减振控制和侧倾控制,该减振控制是在车轮从车轮通过预测位置通过时基于目标减振控制力来控制控制力产生装置的控制,该侧倾控制是基于目标侧倾控制力来控制控制力产生装置的控制,该目标侧倾控制力用于基于侧倾指标值来减小簧上的侧倾,在同时执行减振控制和侧倾控制时,基于进行了目标减振控制力的减小校正和目标侧倾控制力的增大校正中的至少一方后的目标减振控制力和目标侧倾控制力来控制控制力产生装置。
一种基于先验信息的车辆轮胎安全检测方法.pdf
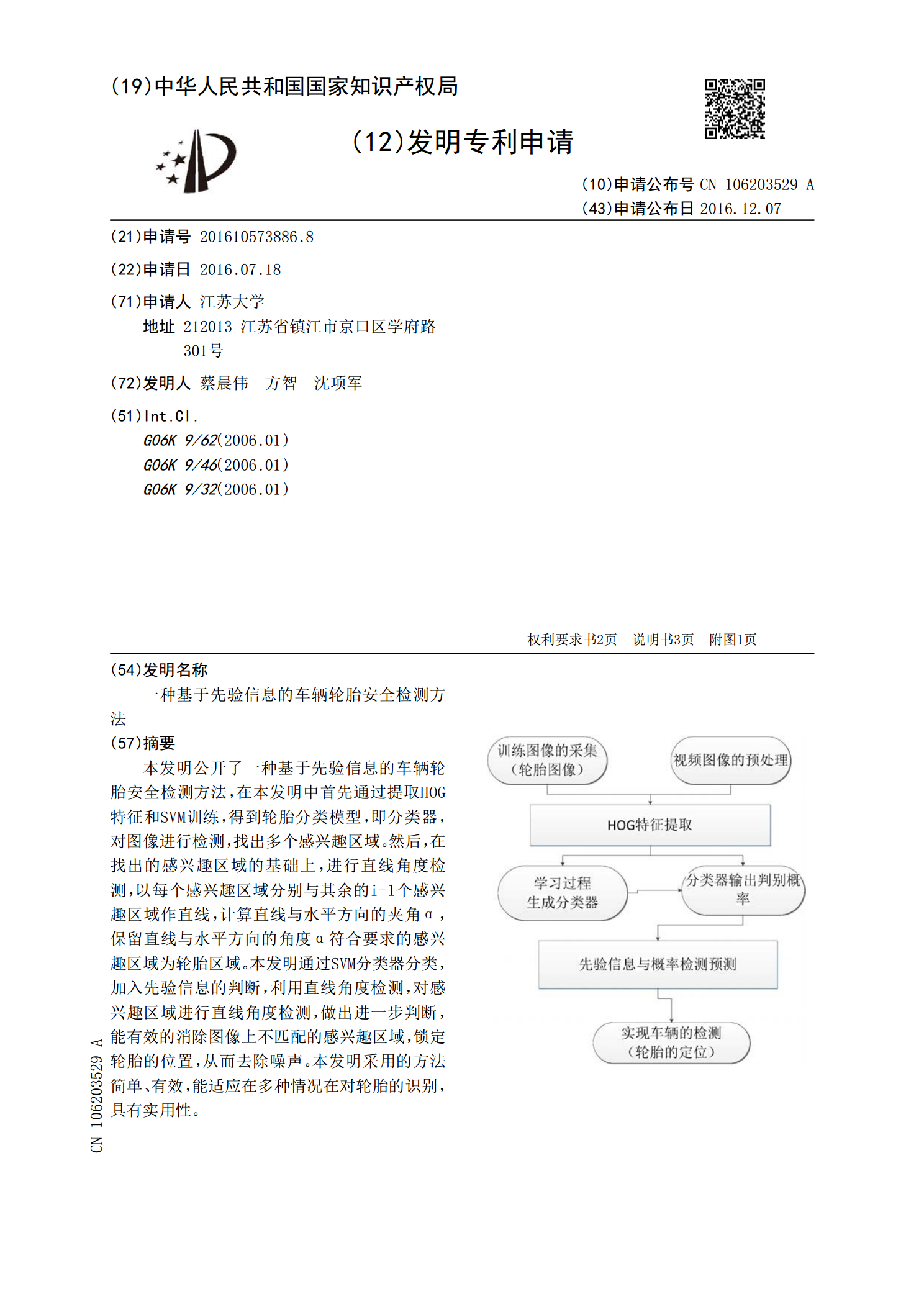
本发明公开了一种基于先验信息的车辆轮胎安全检测方法,在本发明中首先通过提取HOG特征和SVM训练,得到轮胎分类模型,即分类器,对图像进行检测,找出多个感兴趣区域。然后,在找出的感兴趣区域的基础上,进行直线角度检测,以每个感兴趣区域分别与其余的i‑1个感兴趣区域作直线,计算直线与水平方向的夹角α,保留直线与水平方向的角度α符合要求的感兴趣区域为轮胎区域。本发明通过SVM分类器分类,加入先验信息的判断,利用直线角度检测,对感兴趣区域进行直线角度检测,做出进一步判断,能有效的消除图像上不匹配的感兴趣区域,锁定轮
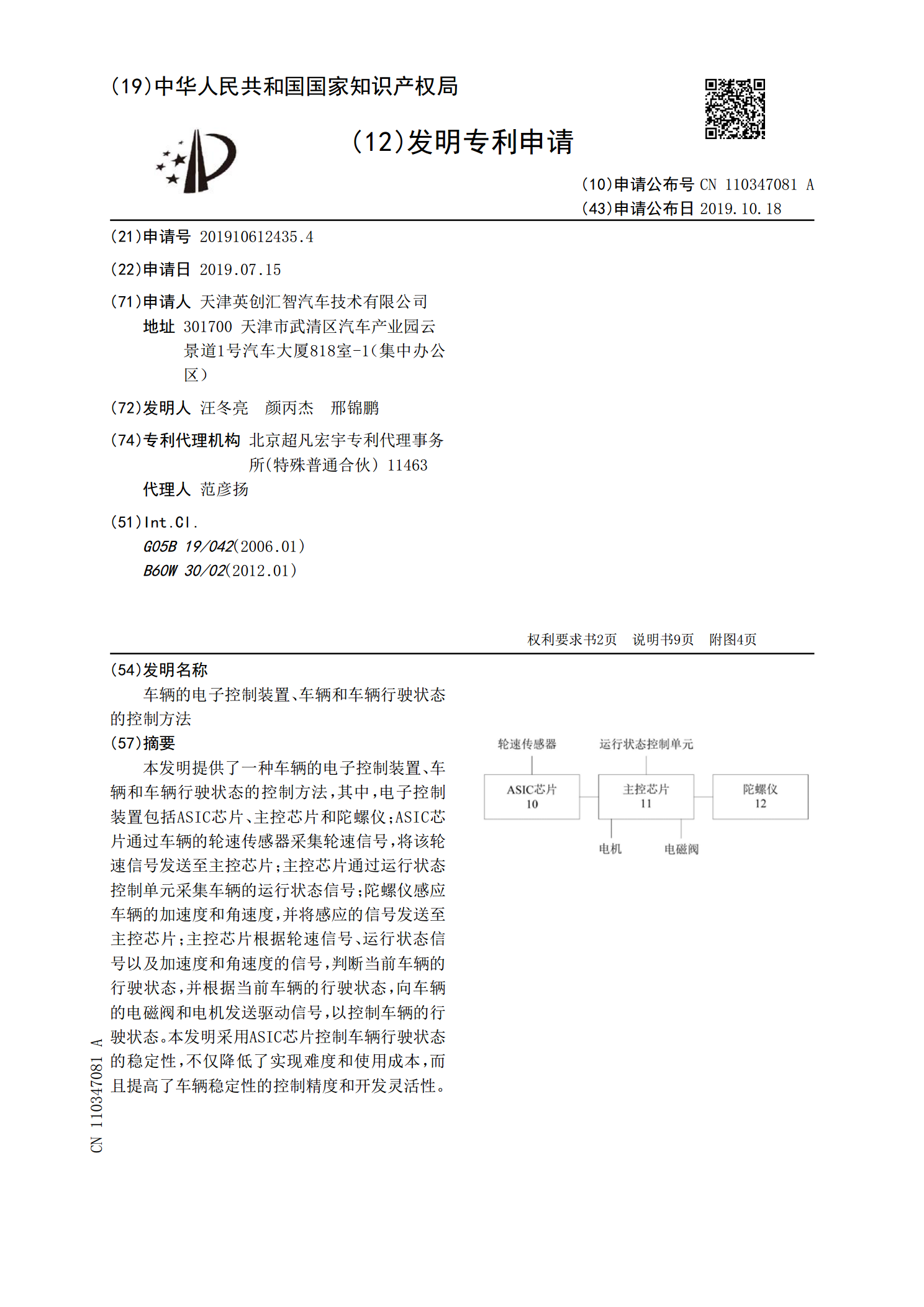
车辆的电子控制装置、车辆和车辆行驶状态的控制方法.pdf
本发明提供了一种车辆的电子控制装置、车辆和车辆行驶状态的控制方法,其中,电子控制装置包括ASIC芯片、主控芯片和陀螺仪;ASIC芯片通过车辆的轮速传感器采集轮速信号,将该轮速信号发送至主控芯片;主控芯片通过运行状态控制单元采集车辆的运行状态信号;陀螺仪感应车辆的加速度和角速度,并将感应的信号发送至主控芯片;主控芯片根据轮速信号、运行状态信号以及加速度和角速度的信号,判断当前车辆的行驶状态,并根据当前车辆的行驶状态,向车辆的电磁阀和电机发送驱动信号,以控制车辆的行驶状态。本发明采用ASIC芯片控制车辆行驶状