
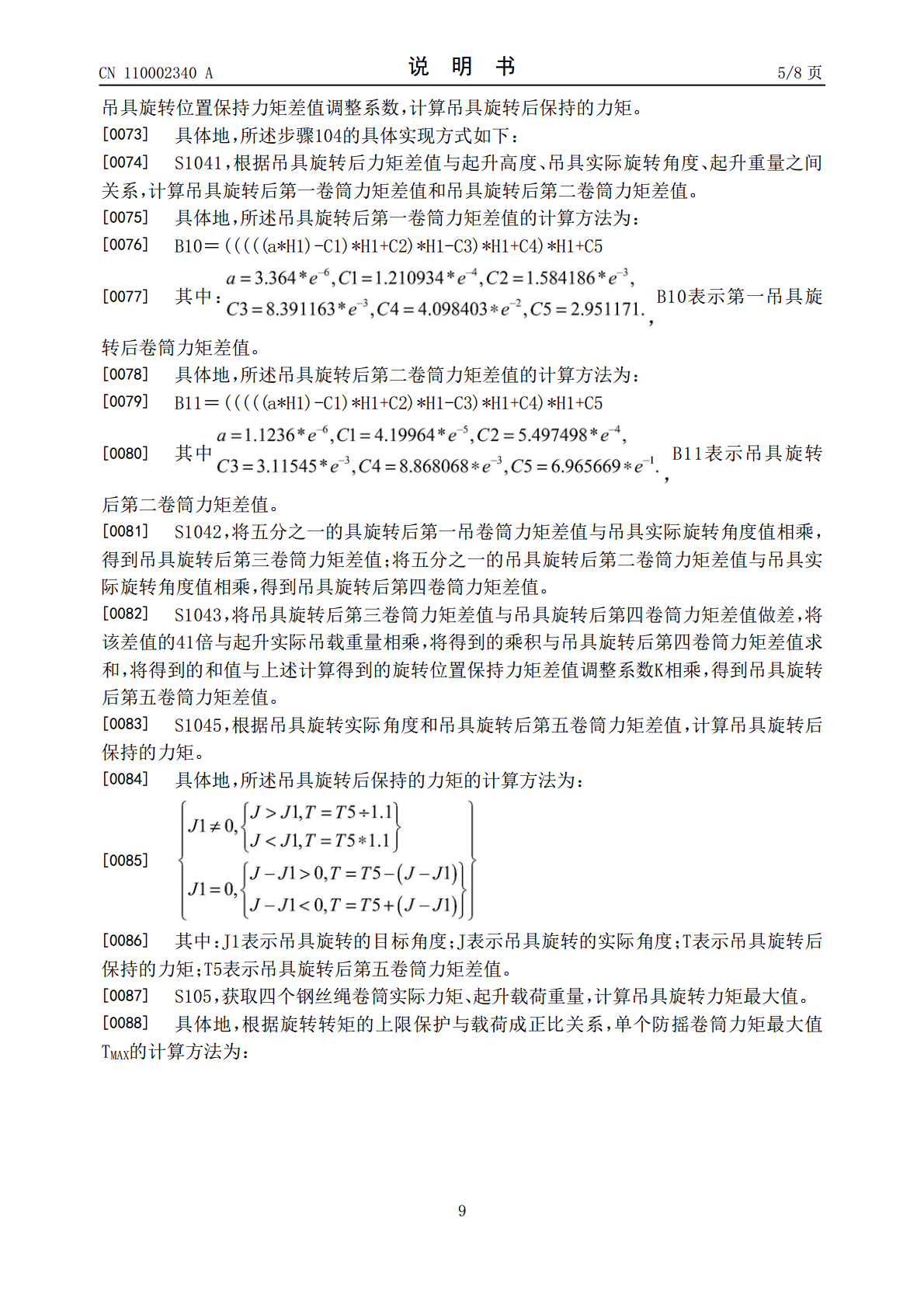
一种轮胎式起重机吊具旋转的控制方法及系统.pdf

书生****写意

1/10
2/10
3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种轮胎式起重机吊具旋转的控制方法及系统.pdf
本发明公开了一种轮胎式起重机吊具旋转的控制方法及系统,利用起升高度以及防摇钢丝绳的实际位置,计算吊具旋转零位位置;根据旋转角度与起升高度、起升重量之间关系,计算吊具实际旋转角度;基于起升高度与钢丝绳受力的关系,计算吊具旋转位置保持力矩差值调整系数;根据起升高度、起升重量、吊具实际旋转角度和吊具旋转位置保持力矩差值调整系数,计算吊具旋转后保持的力矩;根据防摇钢丝绳的实际力矩的大小和起升重量,计算吊具旋转力矩最大值;根据吊具旋转零位位置、吊具实际旋转角度和吊具旋转后保持的力矩,计算多个防摇钢丝绳的实际输出力矩
叶片吊具的旋转控制方法和系统.pdf
提供一种叶片吊具的旋转控制方法和系统,旋转控制方法包括:响应于启动指令,控制两个主伸缩机构的伸缩杆运动以驱动曲柄转动,使得叶片夹具旋转;响应于确定叶片夹具的旋转满足预设的停止条件,控制两个主伸缩机构的伸缩杆停止运动。基于本发明提供的叶片吊具,本发明提供的旋转控制方法可以控制两个主伸缩机构的伸缩杆运动以驱动曲柄转动,在曲柄的带动下,旋转机构随之一起旋转,进而驱动叶片夹具所夹持的叶片一同旋转,使得叶片能够进行较大角度范围的旋转以到达期望的角度,在叶片安装过程中不需要对轮毂进行盘车,节省叶片吊装时间,降低成本。

轮胎式起重机吊具的减摇装置.pdf
本发明涉及一种轮胎式起重机吊具的减摇装置,小车架上安装有两套驱动机构及四组滑轮组,每套驱动机构包括第一驱动装置及第二驱动装置,两套驱动机构与吊具之间布置有四根减摇钢丝绳,第一减摇钢丝绳及第二减摇钢丝绳的上端分别固定在其中一套驱动机构中的第一卷筒及第二卷筒上,其下端分别绕过一组滑轮组后固定在吊具的第一侧上;第三减摇钢丝绳及第四减摇钢丝绳的上端分别固定在另一套驱动机构中的第一卷筒及第二卷筒上,其下端分别绕过一组滑轮组后固定在吊具的第二侧上。本发明放置在小车架平面上,可降低起重机总体高度,降低起重机成本;增加了
吊具吊装方法、吊具及起重机.pdf
本申请涉及起重机的技术领域,具体涉及吊具吊装方法、吊具及起重机。吊具吊装方法包括:获取物体信息;根据物体信息调节吊具夹持端尺寸,并将吊具移动至物体上方;获取物体的第一姿态信息,并根据第一姿态信息调节吊具的姿态;当吊具完成调节后,控制吊具夹取物体,并将物体吊运至目标位置上方;获取物体的放置信息;根据放置信息调节吊具的姿态并生成第二姿态信息;根据第二姿态信息和放置信息而控制吊具将物体放置在目标位置;以此在吊具吊装过程中,根据物体的尺寸和姿态来对吊具的夹持物体的尺寸和姿态进行相应的调整,从而便于吊具顺利对物体进

一种轮胎吊闭式液压系统操作装置及控制方法.pdf
本发明公开了一种轮胎吊闭式液压系统操作装置及控制方法,包括:车载控制器接收吊臂长度传感器、吊臂变幅角度传感器、变幅缸压力传感器、风速传感器、吊钩倍率、强制开关模块、速度选择开关模块、模式选择开关模块信号,进行计算后得出该工况下允许的最大速度;根据计算值,车载控制器根据手柄动作角度模块成比例的控制闭式泵摆角,从而控制动作的速度;基于模式选择开关模块的信号,然后根据手柄角度模块、油门踏板角度模块和闭式泵出口压力模块,计算出该动作下的需求功率;最后通过功率匹配算法模块,可以求出此功率需求下最优的发动机转速、控制