
一种用于核环境下的重载多关节机器人的底盘结构.pdf

a是****澜吖

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于核环境下的重载多关节机器人的底盘结构.pdf
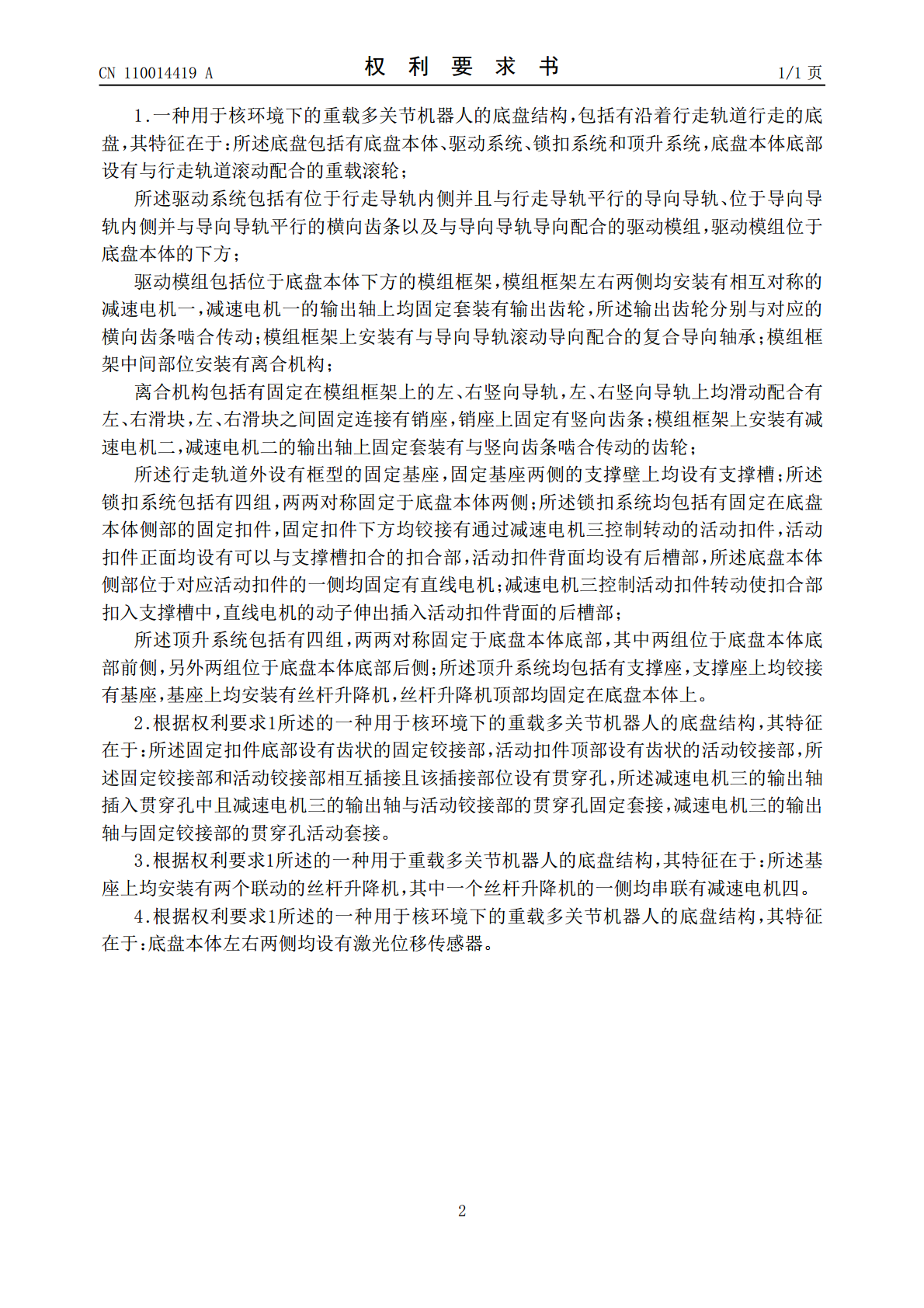
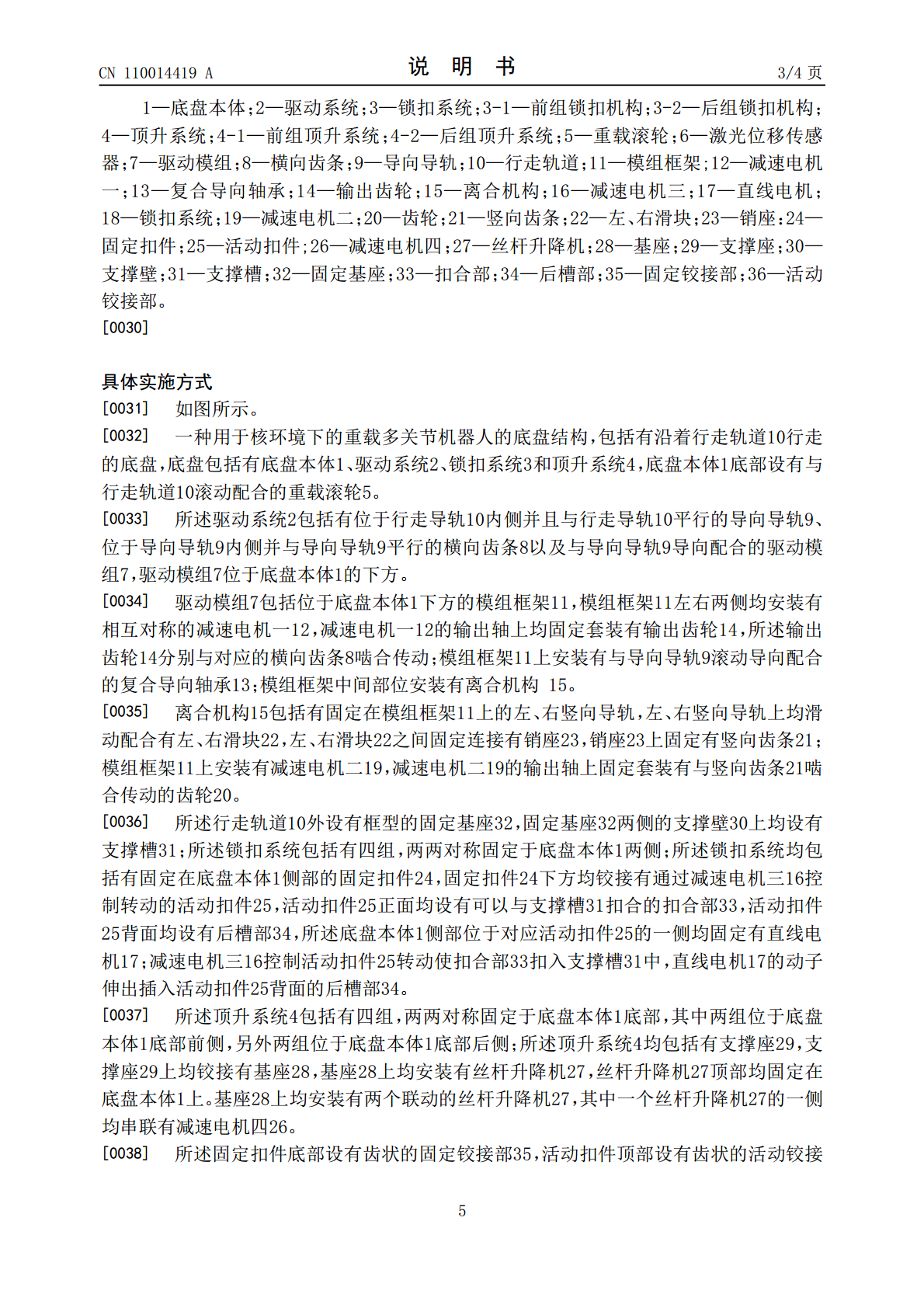
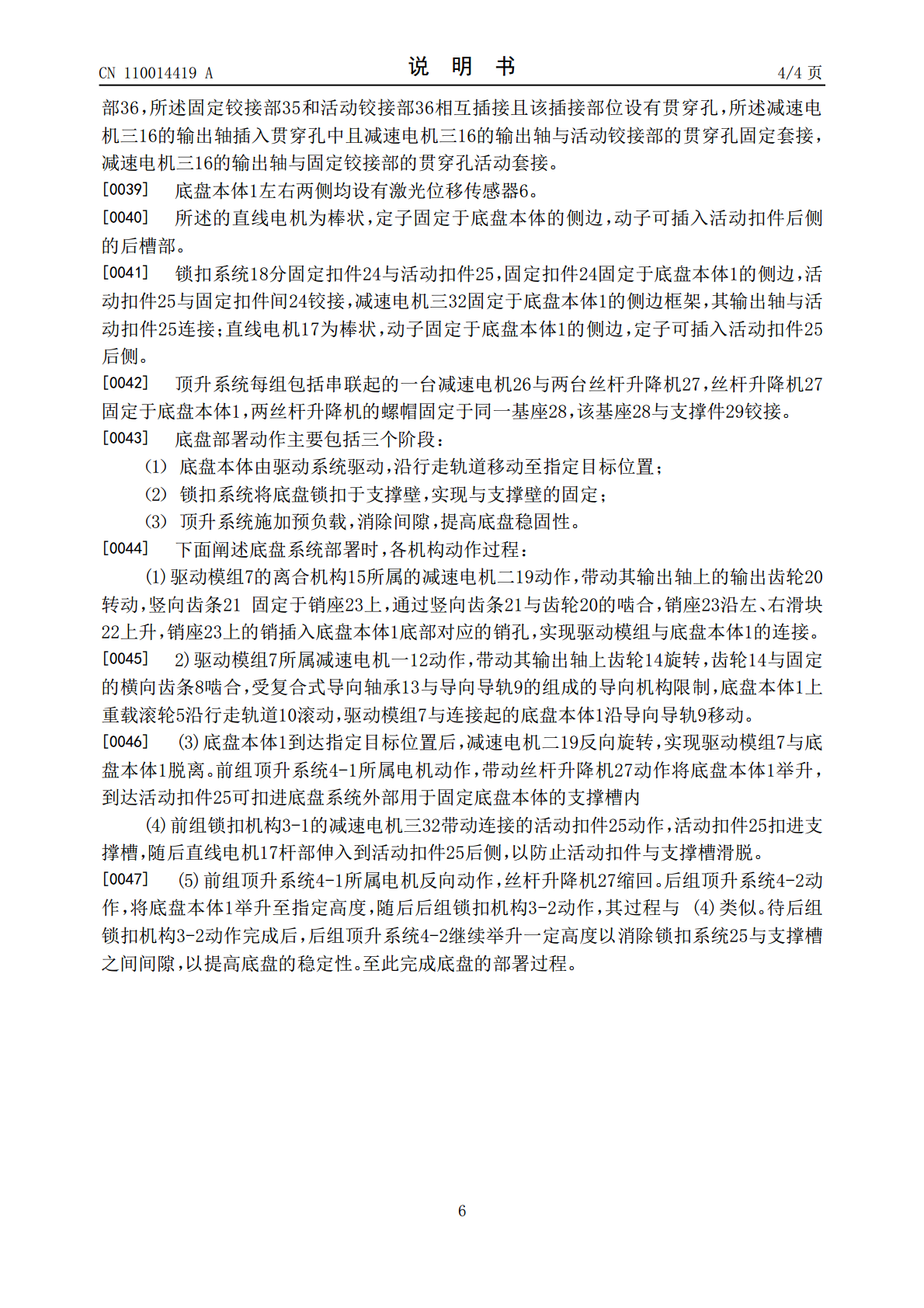
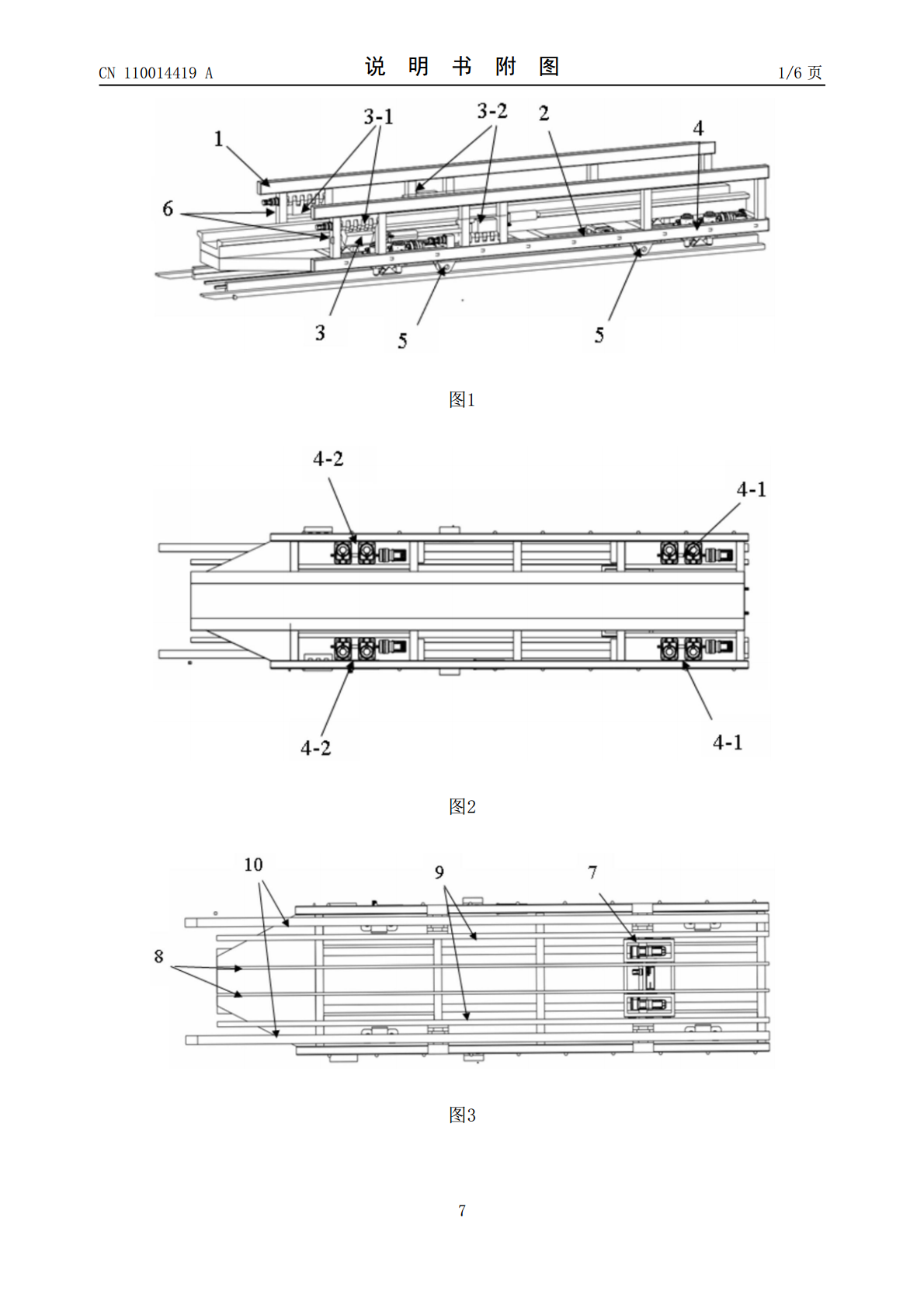
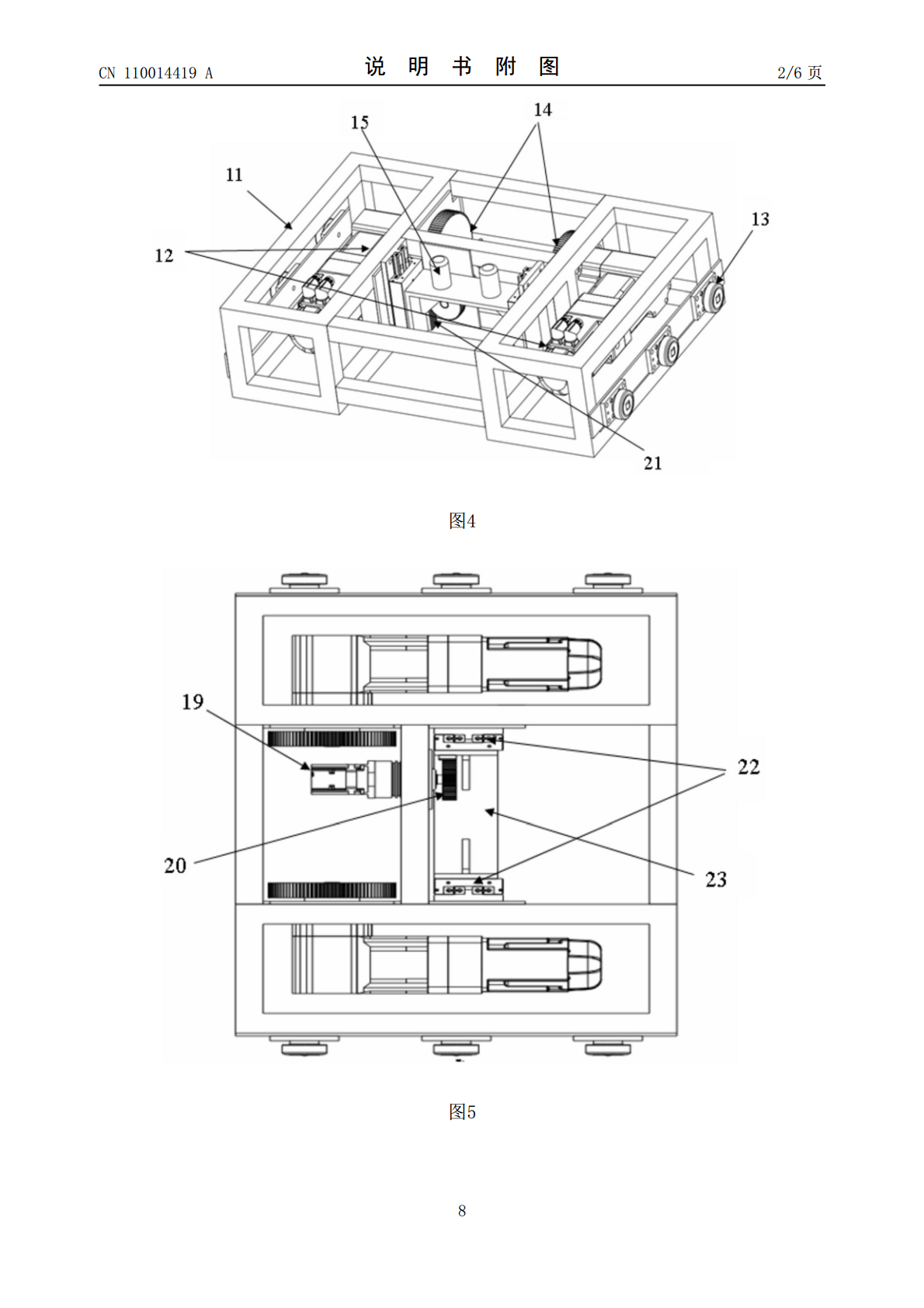
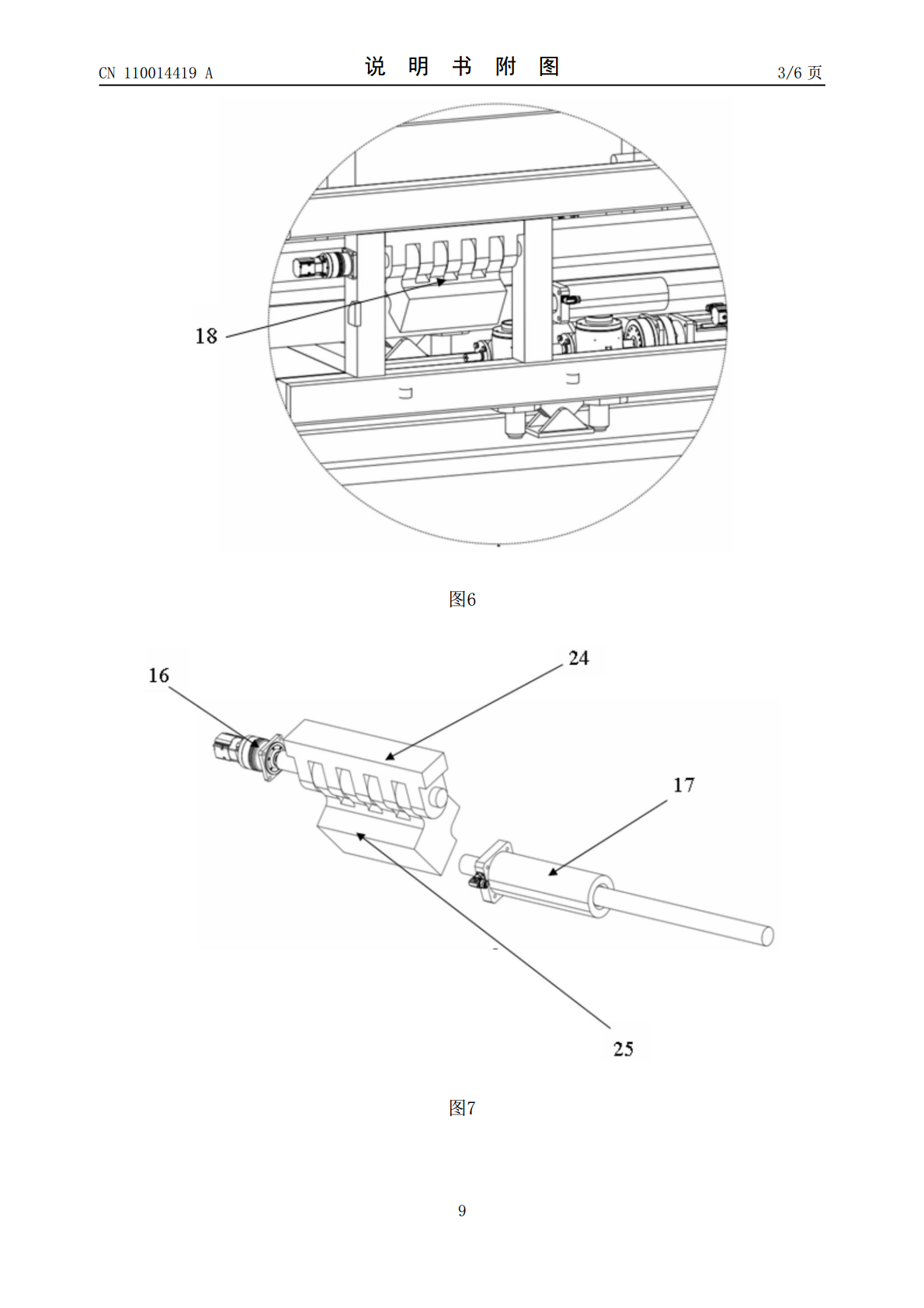
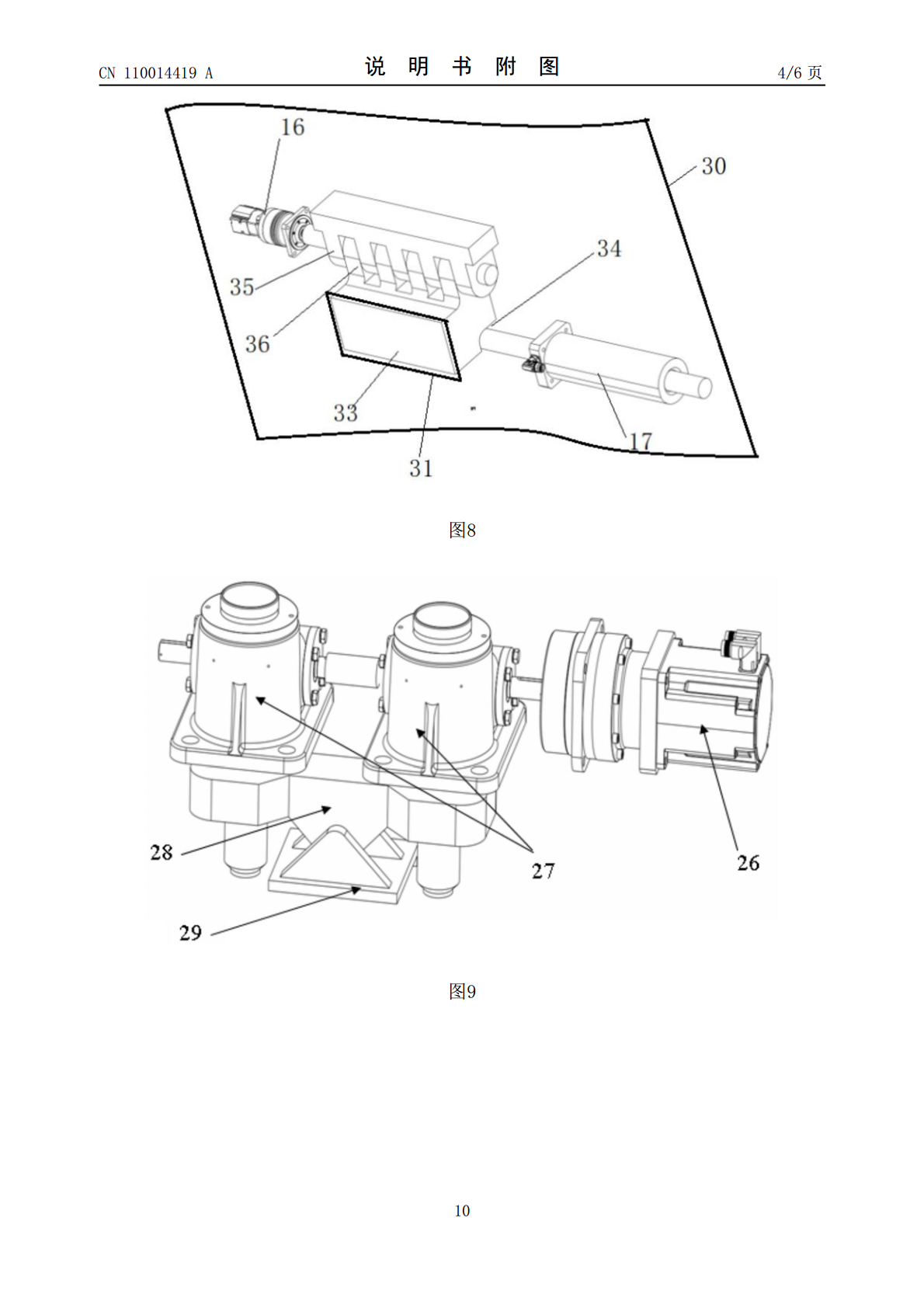
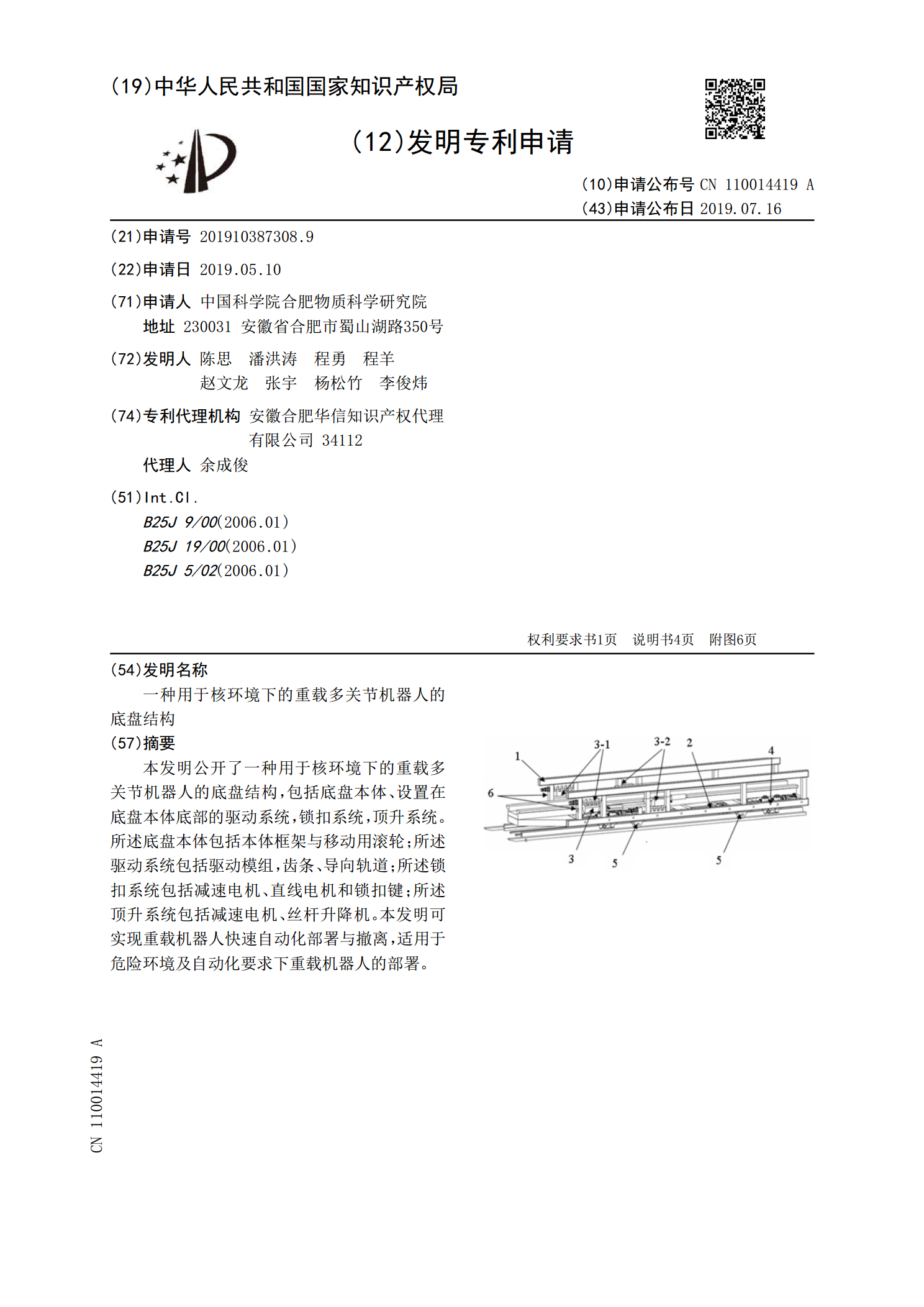
本发明公开了一种用于核环境下的重载多关节机器人的底盘结构,包括底盘本体、设置在底盘本体底部的驱动系统,锁扣系统,顶升系统。所述底盘本体包括本体框架与移动用滚轮;所述驱动系统包括驱动模组,齿条、导向轨道;所述锁扣系统包括减速电机、直线电机和锁扣键;所述顶升系统包括减速电机、丝杆升降机。本发明可实现重载机器人快速自动化部署与撤离,适用于危险环境及自动化要求下重载机器人的部署。
一种用于核环境下大型重载部件的转运机构.pdf
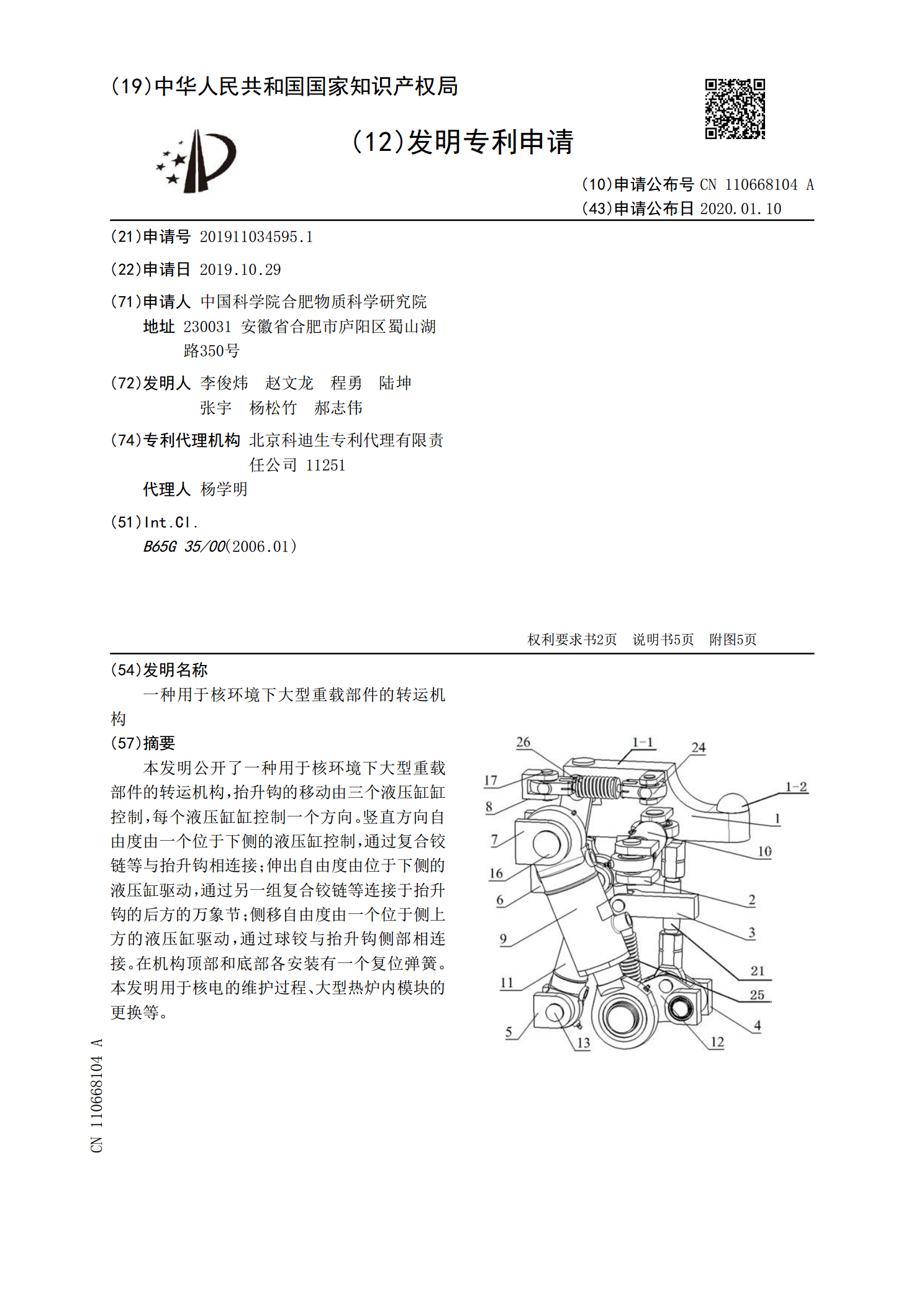
本发明公开了一种用于核环境下大型重载部件的转运机构,抬升钩的移动由三个液压缸缸控制,每个液压缸缸控制一个方向。竖直方向自由度由一个位于下侧的液压缸控制,通过复合铰链等与抬升钩相连接;伸出自由度由位于下侧的液压缸驱动,通过另一组复合铰链等连接于抬升钩的后方的万象节;侧移自由度由一个位于侧上方的液压缸驱动,通过球铰与抬升钩侧部相连接。在机构顶部和底部各安装有一个复位弹簧。本发明用于核电的维护过程、大型热炉内模块的更换等。
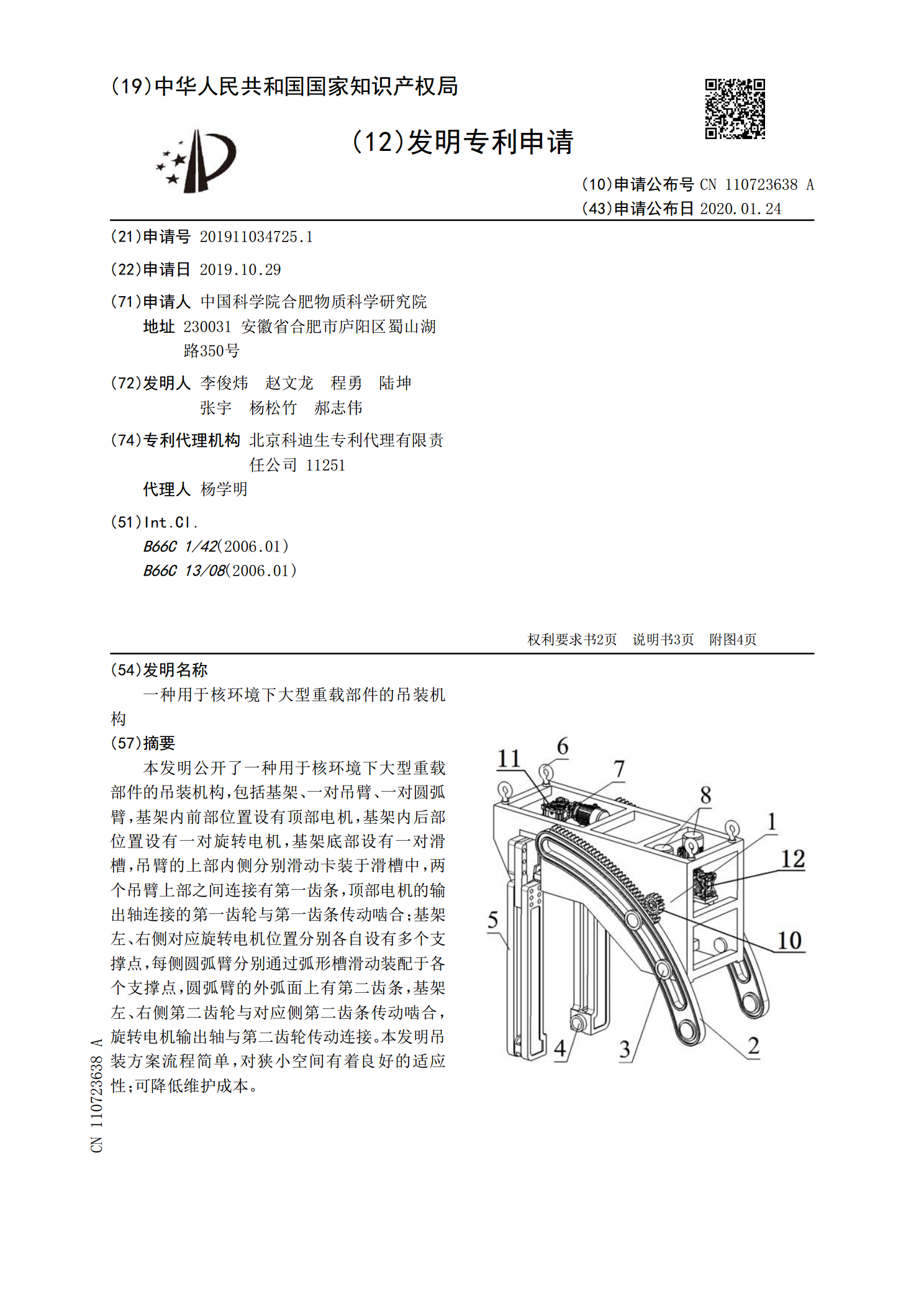
一种用于核环境下大型重载部件的吊装机构.pdf
本发明公开了一种用于核环境下大型重载部件的吊装机构,包括基架、一对吊臂、一对圆弧臂,基架内前部位置设有顶部电机,基架内后部位置设有一对旋转电机,基架底部设有一对滑槽,吊臂的上部内侧分别滑动卡装于滑槽中,两个吊臂上部之间连接有第一齿条,顶部电机的输出轴连接的第一齿轮与第一齿条传动啮合;基架左、右侧对应旋转电机位置分别各自设有多个支撑点,每侧圆弧臂分别通过弧形槽滑动装配于各个支撑点,圆弧臂的外弧面上有第二齿条,基架左、右侧第二齿轮与对应侧第二齿条传动啮合,旋转电机输出轴与第二齿轮传动连接。本发明吊装方案流程简
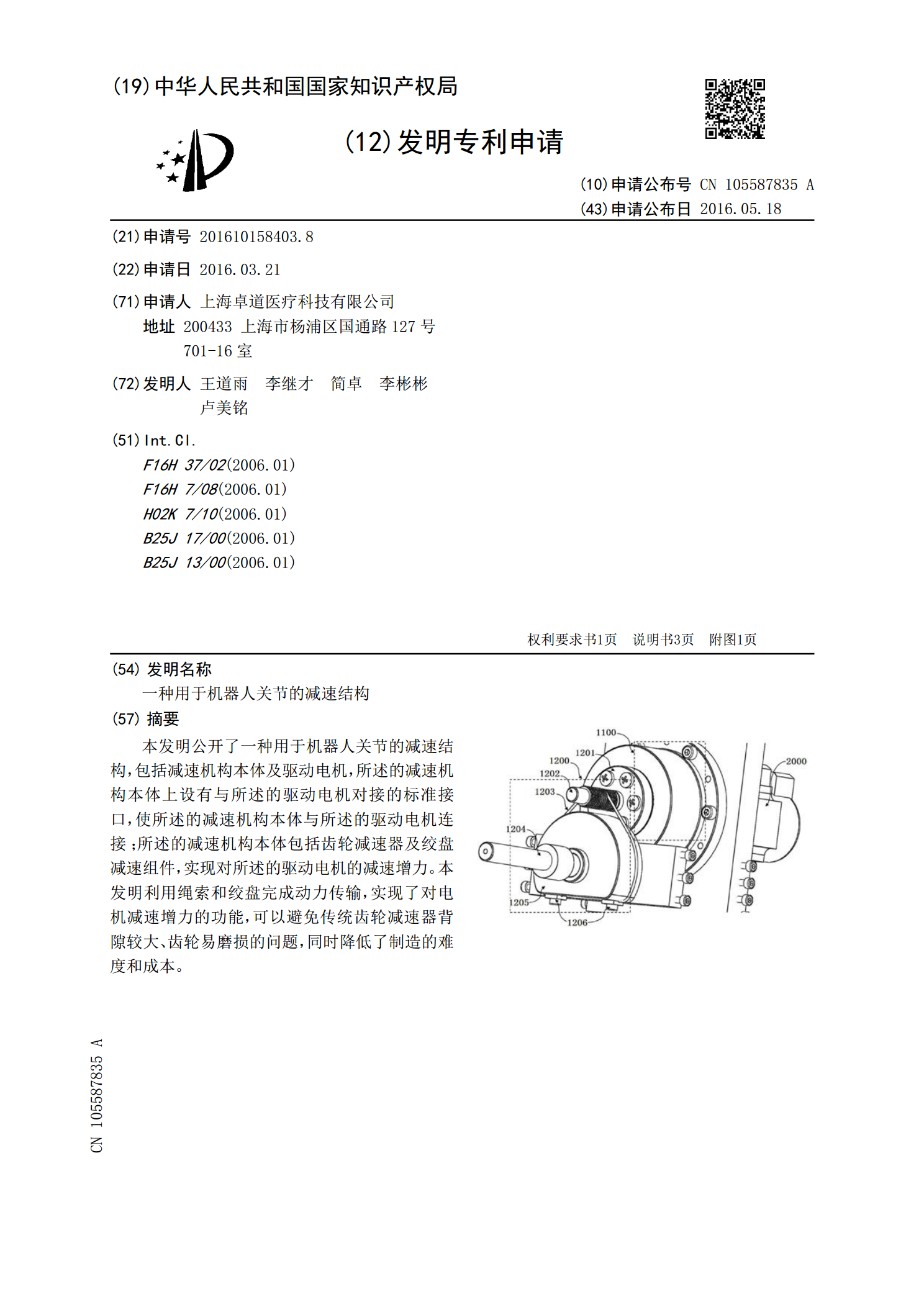
一种用于机器人关节的减速结构.pdf
本发明公开了一种用于机器人关节的减速结构,包括减速机构本体及驱动电机,所述的减速机构本体上设有与所述的驱动电机对接的标准接口,使所述的减速机构本体与所述的驱动电机连接;所述的减速机构本体包括齿轮减速器及绞盘减速组件,实现对所述的驱动电机的减速增力。本发明利用绳索和绞盘完成动力传输,实现了对电机减速增力的功能,可以避免传统齿轮减速器背隙较大、齿轮易磨损的问题,同时降低了制造的难度和成本。
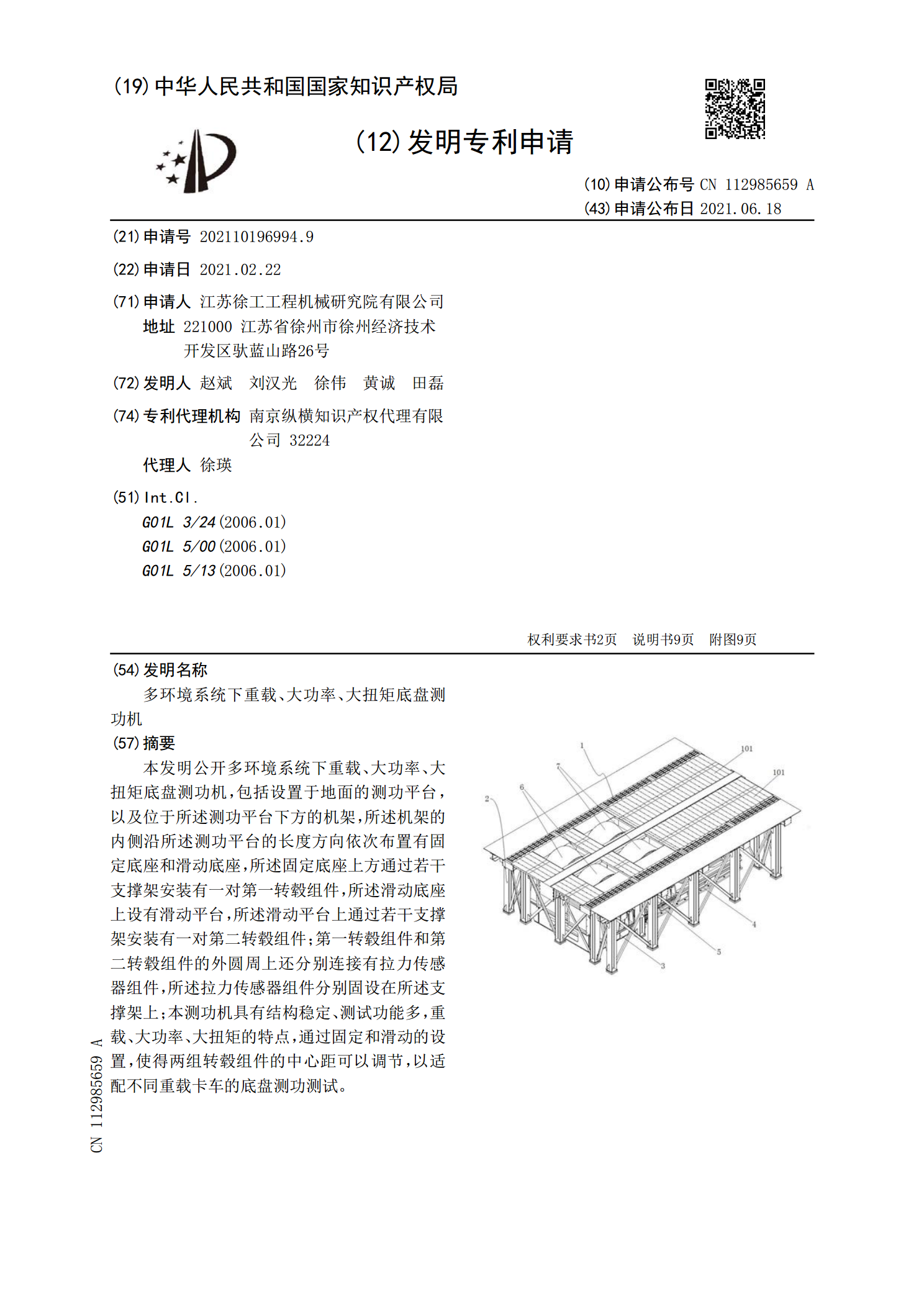
多环境系统下重载、大功率、大扭矩底盘测功机.pdf
本发明公开多环境系统下重载、大功率、大扭矩底盘测功机,包括设置于地面的测功平台,以及位于所述测功平台下方的机架,所述机架的内侧沿所述测功平台的长度方向依次布置有固定底座和滑动底座,所述固定底座上方通过若干支撑架安装有一对第一转毂组件,所述滑动底座上设有滑动平台,所述滑动平台上通过若干支撑架安装有一对第二转毂组件;第一转毂组件和第二转毂组件的外圆周上还分别连接有拉力传感器组件,所述拉力传感器组件分别固设在所述支撑架上;本测功机具有结构稳定、测试功能多,重载、大功率、大扭矩的特点,通过固定和滑动的设置,使得两