
自平衡两轮车辆.pdf

元容****少女

1/10
2/10
3/10
4/10
5/10
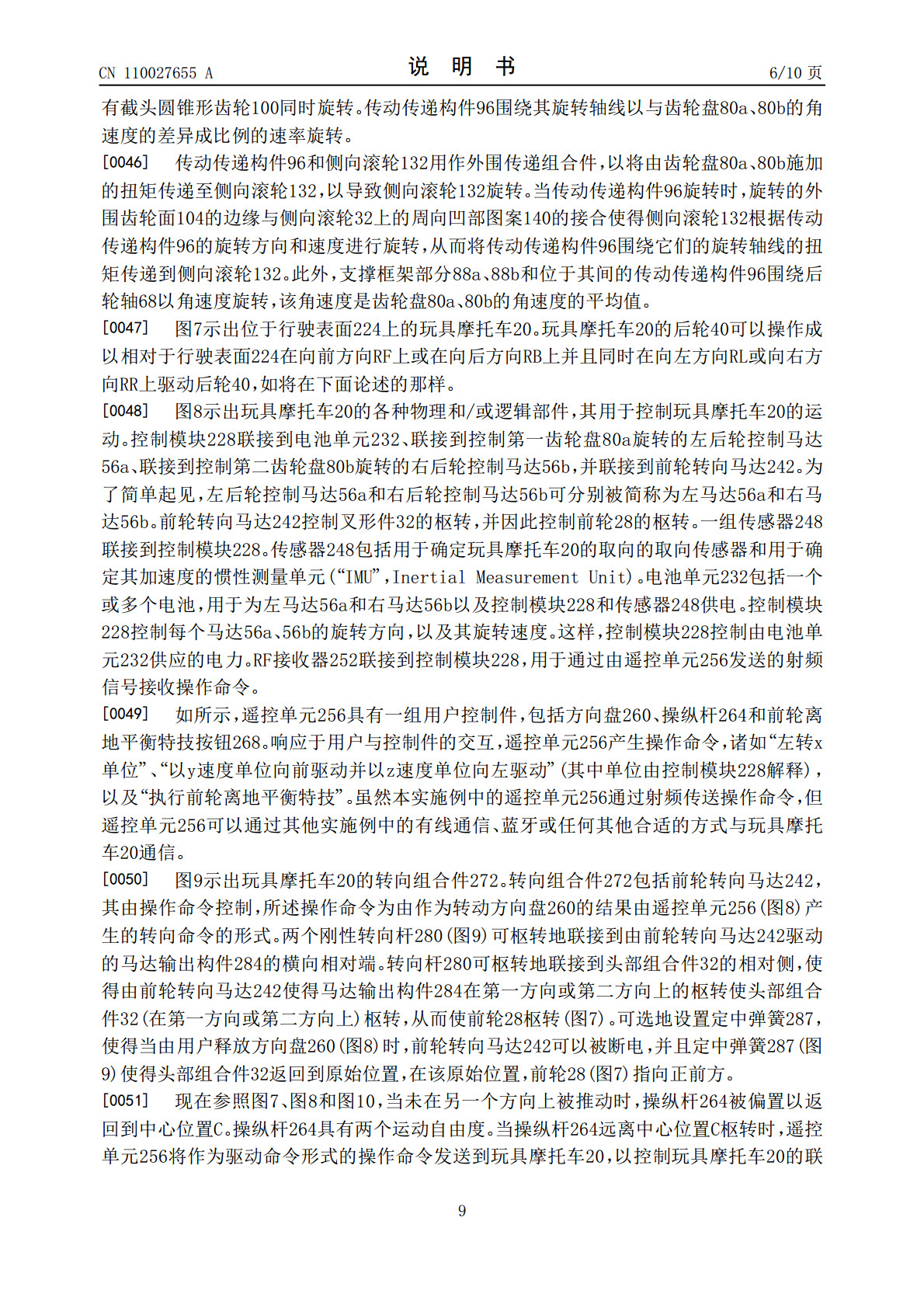
6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自平衡两轮车辆.pdf
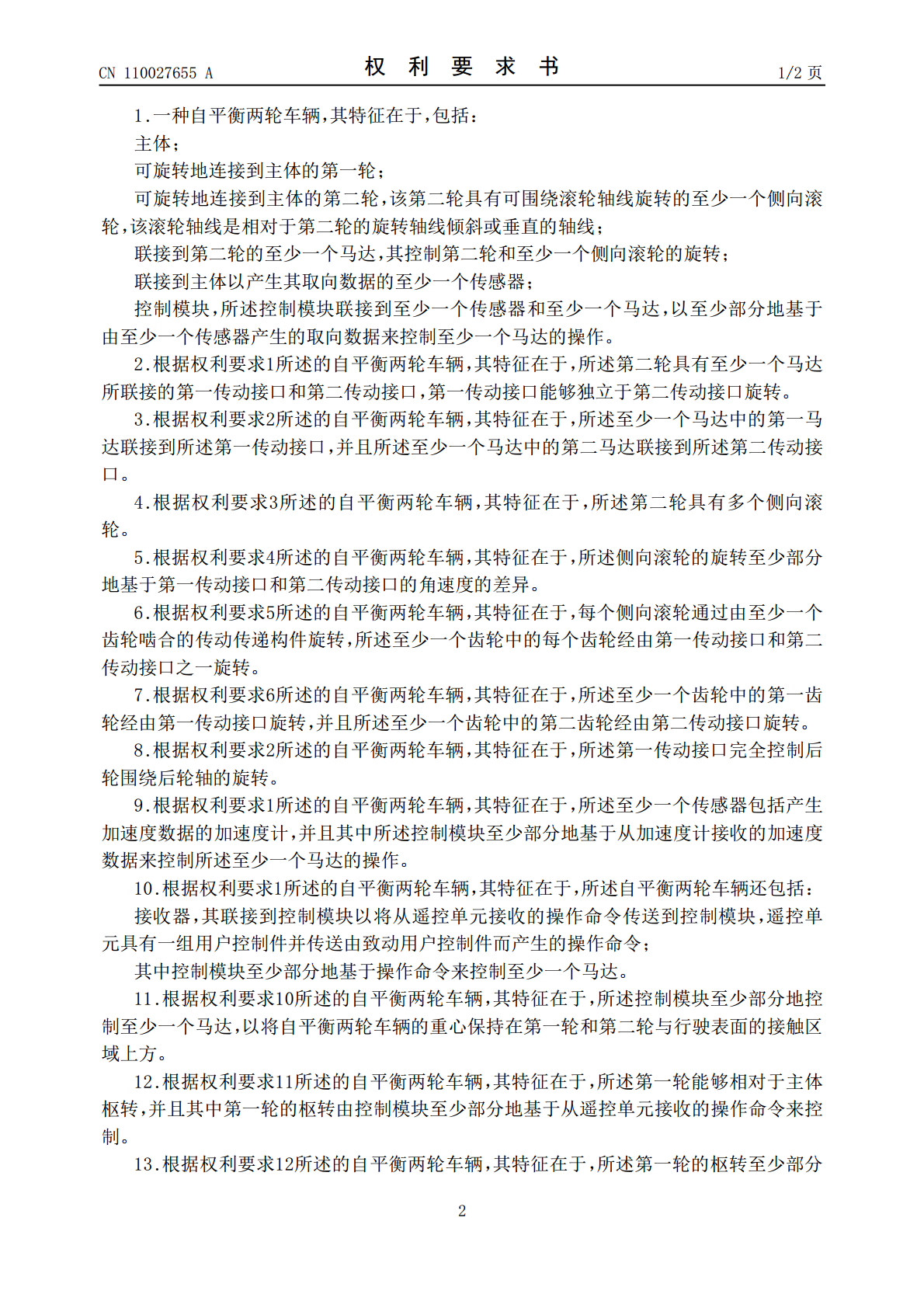
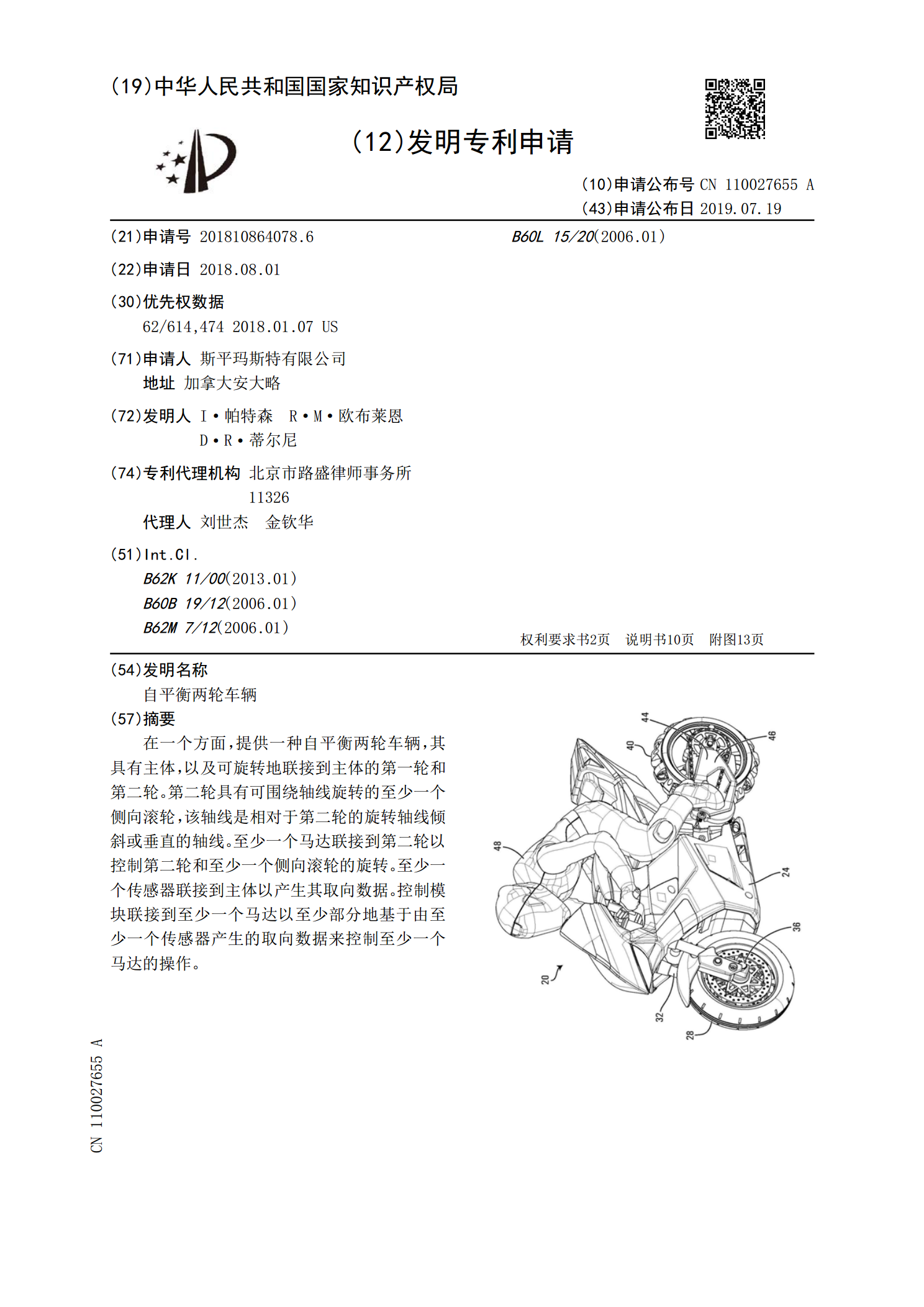
在一个方面,提供一种自平衡两轮车辆,其具有主体,以及可旋转地联接到主体的第一轮和第二轮。第二轮具有可围绕轴线旋转的至少一个侧向滚轮,该轴线是相对于第二轮的旋转轴线倾斜或垂直的轴线。至少一个马达联接到第二轮以控制第二轮和至少一个侧向滚轮的旋转。至少一个传感器联接到主体以产生其取向数据。控制模块联接到至少一个马达以至少部分地基于由至少一个传感器产生的取向数据来控制至少一个马达的操作。

两轮自平衡小车.pdf
本发明公开了一种两轮自平衡小车,包括车体(1)、对称设在车体(1)两侧的车轮(2)、设在车体(1)中心位置的连杆(3)、设在车轮(2)内的电机以及主控制器(7)、电机控制器(9),主控制器(7)生成信号传递给电机控制器(9),电机控制器(9)控制电机启动,电机驱动车轮(2)转动,车辆产生顺时针的倾翻力矩G×L1和轮胎获得地面逆时针的摩擦力矩F×R相平衡,使得整车保持平衡。按照本发明的技术方案,主控制器接收到陀螺仪传感器采集的角度信号,并综合转向电位计的信号,生成两个信号分别传递给两个电机控制器,控制电机驱

自平衡两轮车.pdf
本发明涉及一种自平衡两轮车,它包括车轮、踏板、踏板轴、车杆、把手、车把连接、车把连接法兰、和连接器,踏板轴由弯头、连接钢管及管法兰组成,车轮有两个,两轮左右横向布置在连接器两侧,在车轮上设有支撑人体的踏板,通过人力产生的一组力矩使自平衡车移动。虽然本自平衡小车需要人力驱动,但本发明最大的优点就是结构简单、价格低廉、绿色环保、制造方便。
两轮自平衡车.pdf
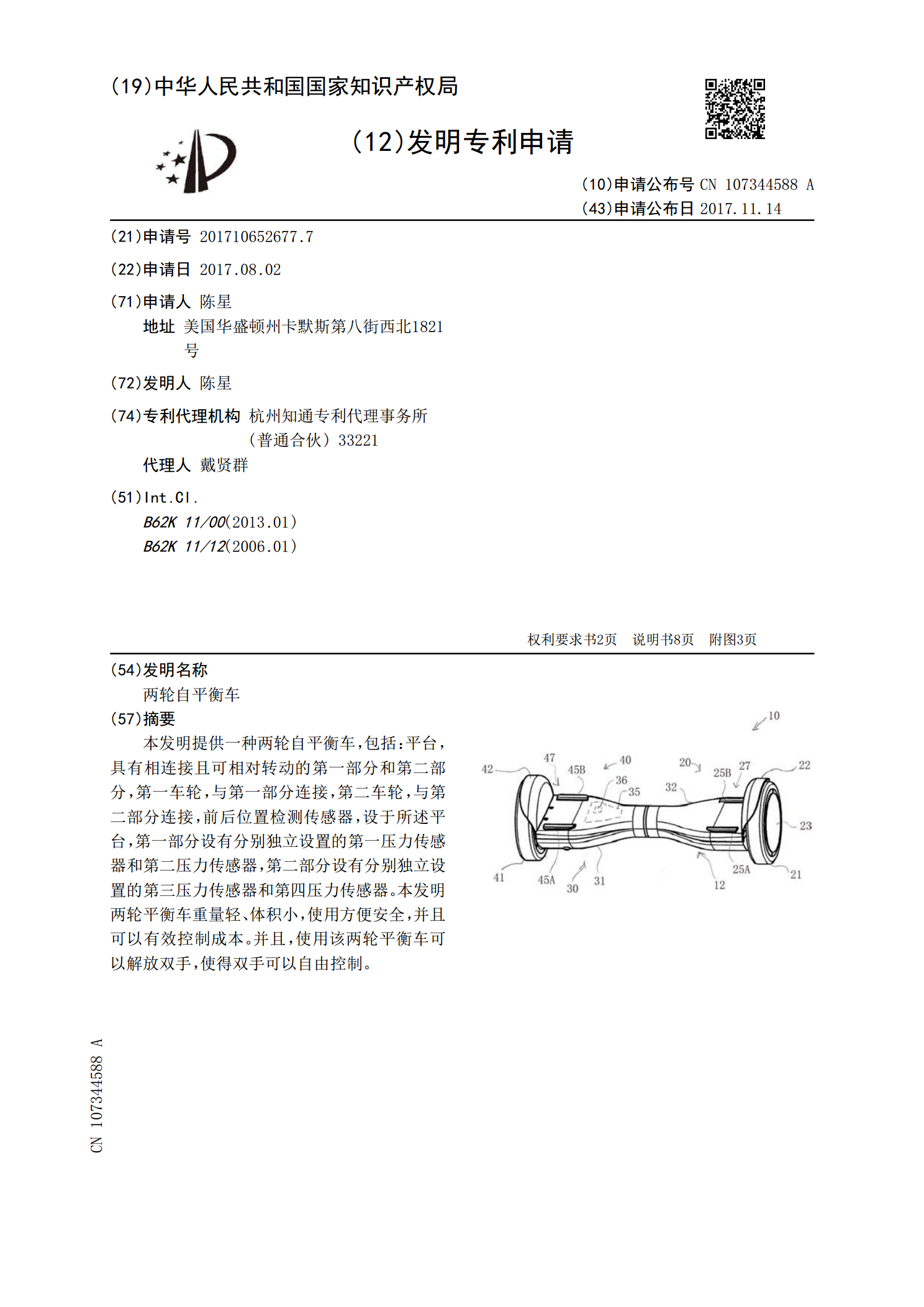
本发明提供一种两轮自平衡车,包括:平台,具有相连接且可相对转动的第一部分和第二部分,第一车轮,与第一部分连接,第二车轮,与第二部分连接,前后位置检测传感器,设于所述平台,第一部分设有分别独立设置的第一压力传感器和第二压力传感器,第二部分设有分别独立设置的第三压力传感器和第四压力传感器。本发明两轮平衡车重量轻、体积小,使用方便安全,并且可以有效控制成本。并且,使用该两轮平衡车可以解放双手,使得双手可以自由控制。

两轮自平衡车.pdf
本发明属于交通工具领域,特别涉及一种两轮自平衡车,包括车体、分别设置于车体两侧的第一驱动轮和第二驱动轮、设置于第一驱动轮外侧的第一脚踏部和设置于第二驱动轮外侧的第二脚踏部。车体内设置有联动机构,连接第一驱动轮和第二驱动轮,用于将自平衡车的位置变化量传递至检测机构。检测机构与联动机构,通过中心轴连接,根据位置变化量得到位置信号,并将位置信号传递至控制机构;控制机构,根据位置信号提取相应的控制指令,控制指令用于控制第一驱动轮和第二驱动轮进行转向作业。本发明提供的两轮自平衡车通过踏板与人体自身动作的结合来控制自