
基于内齿圈传动的舵轮及全向AGV叉车.pdf

靖烟****魔王

1/9
2/9
3/9

4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于内齿圈传动的舵轮及全向AGV叉车.pdf
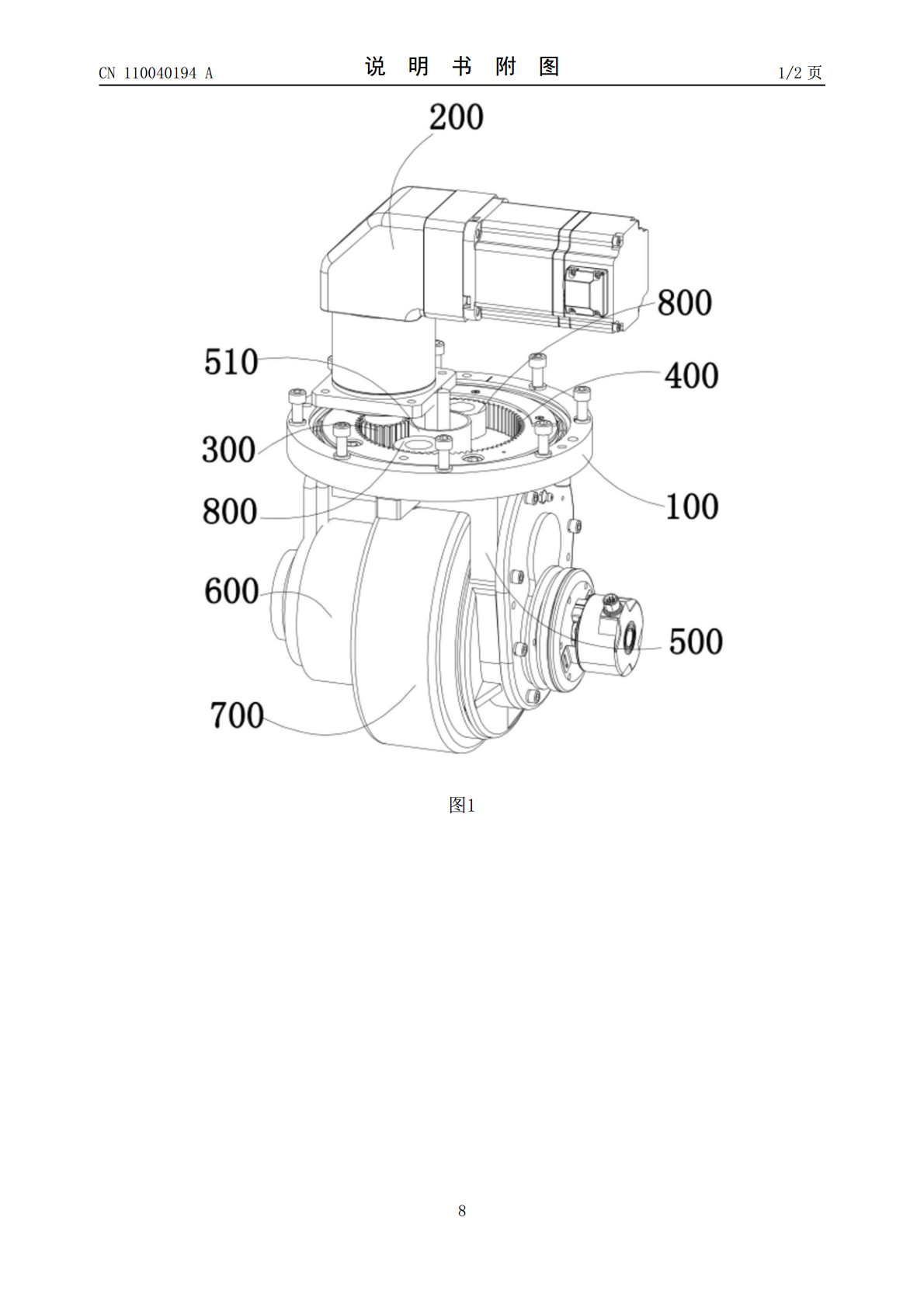
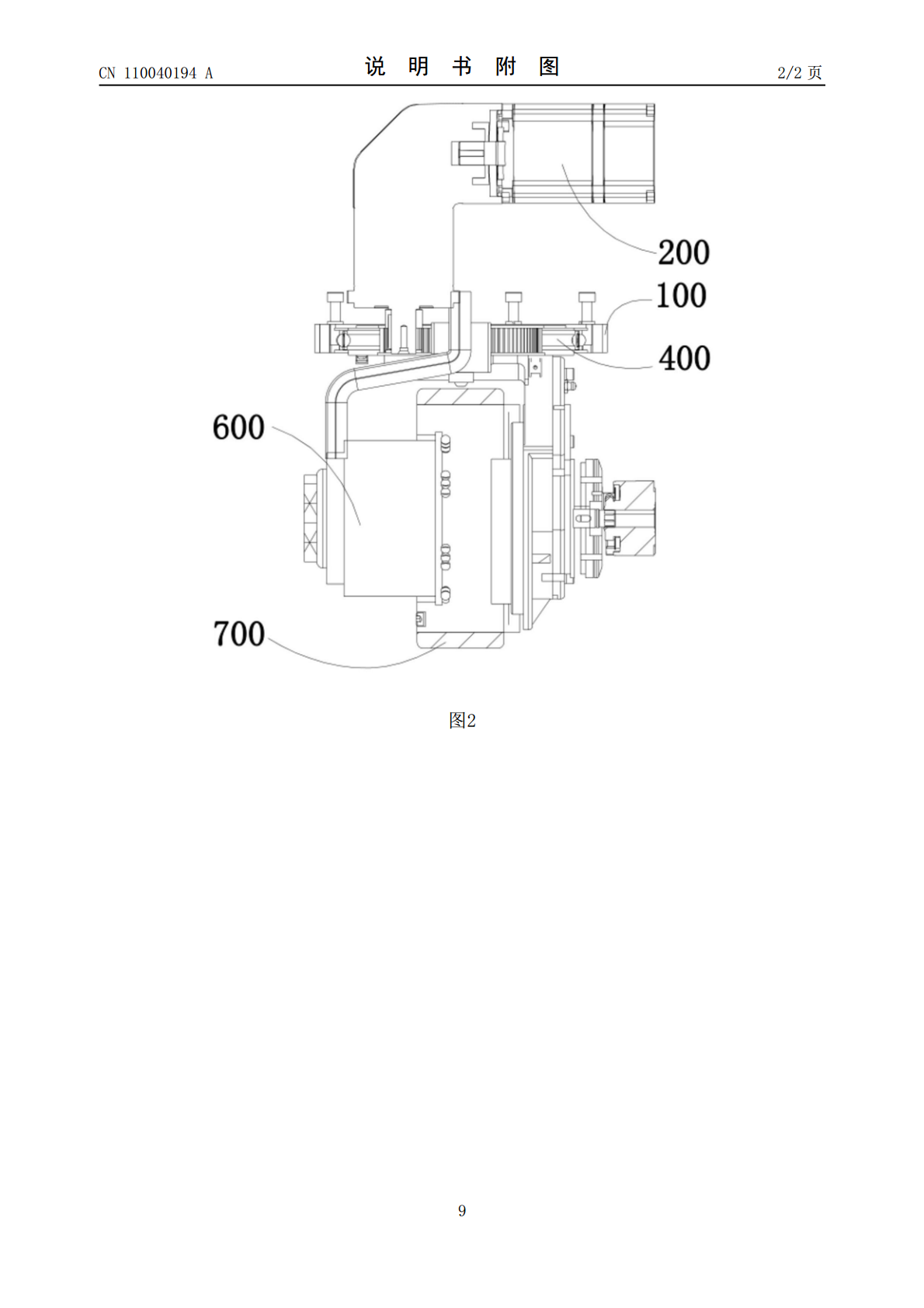
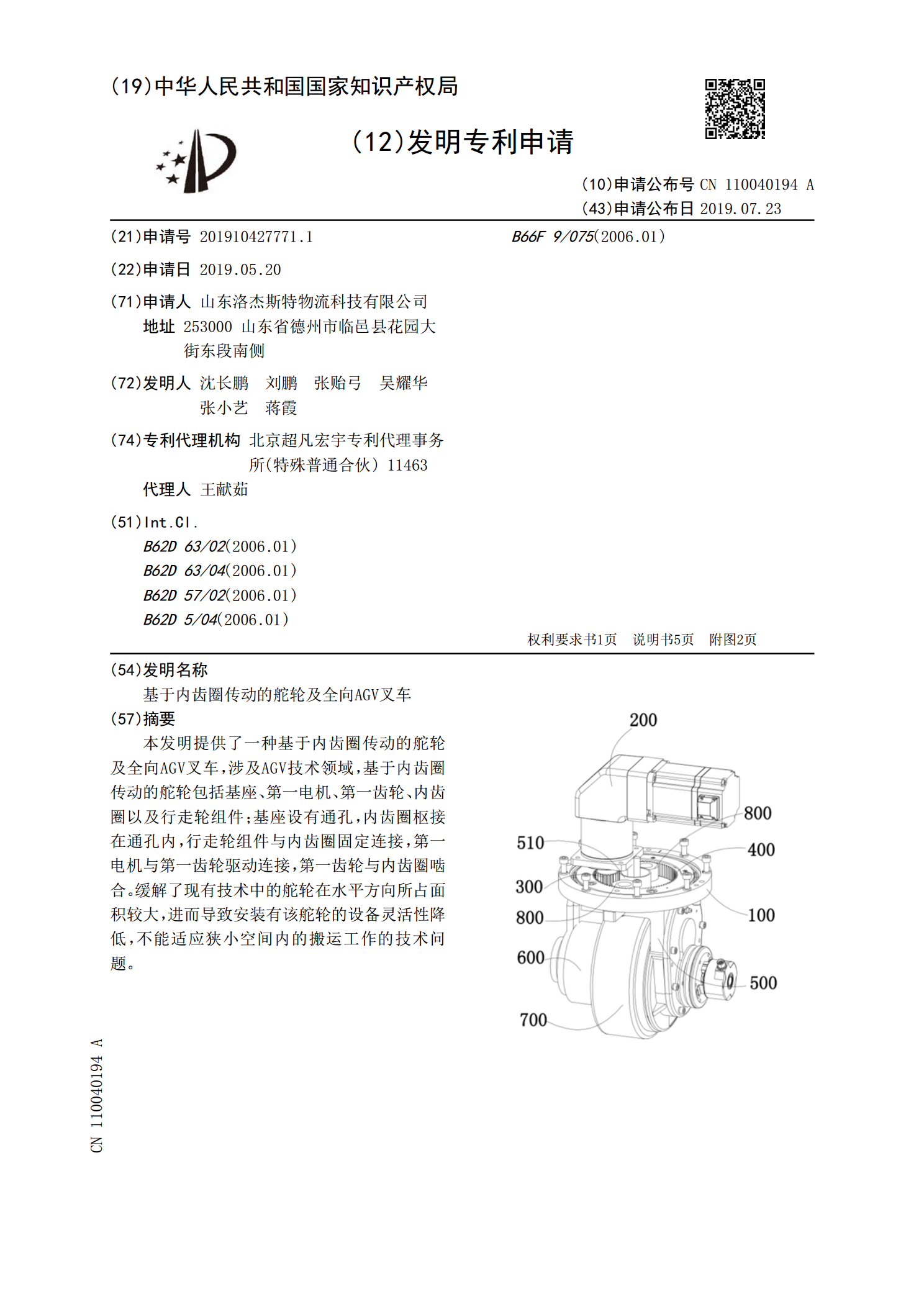
本发明提供了一种基于内齿圈传动的舵轮及全向AGV叉车,涉及AGV技术领域,基于内齿圈传动的舵轮包括基座、第一电机、第一齿轮、内齿圈以及行走轮组件;基座设有通孔,内齿圈枢接在通孔内,行走轮组件与内齿圈固定连接,第一电机与第一齿轮驱动连接,第一齿轮与内齿圈啮合。缓解了现有技术中的舵轮在水平方向所占面积较大,进而导致安装有该舵轮的设备灵活性降低,不能适应狭小空间内的搬运工作的技术问题。
双舵轮底盘及全向AGV叉车.pdf
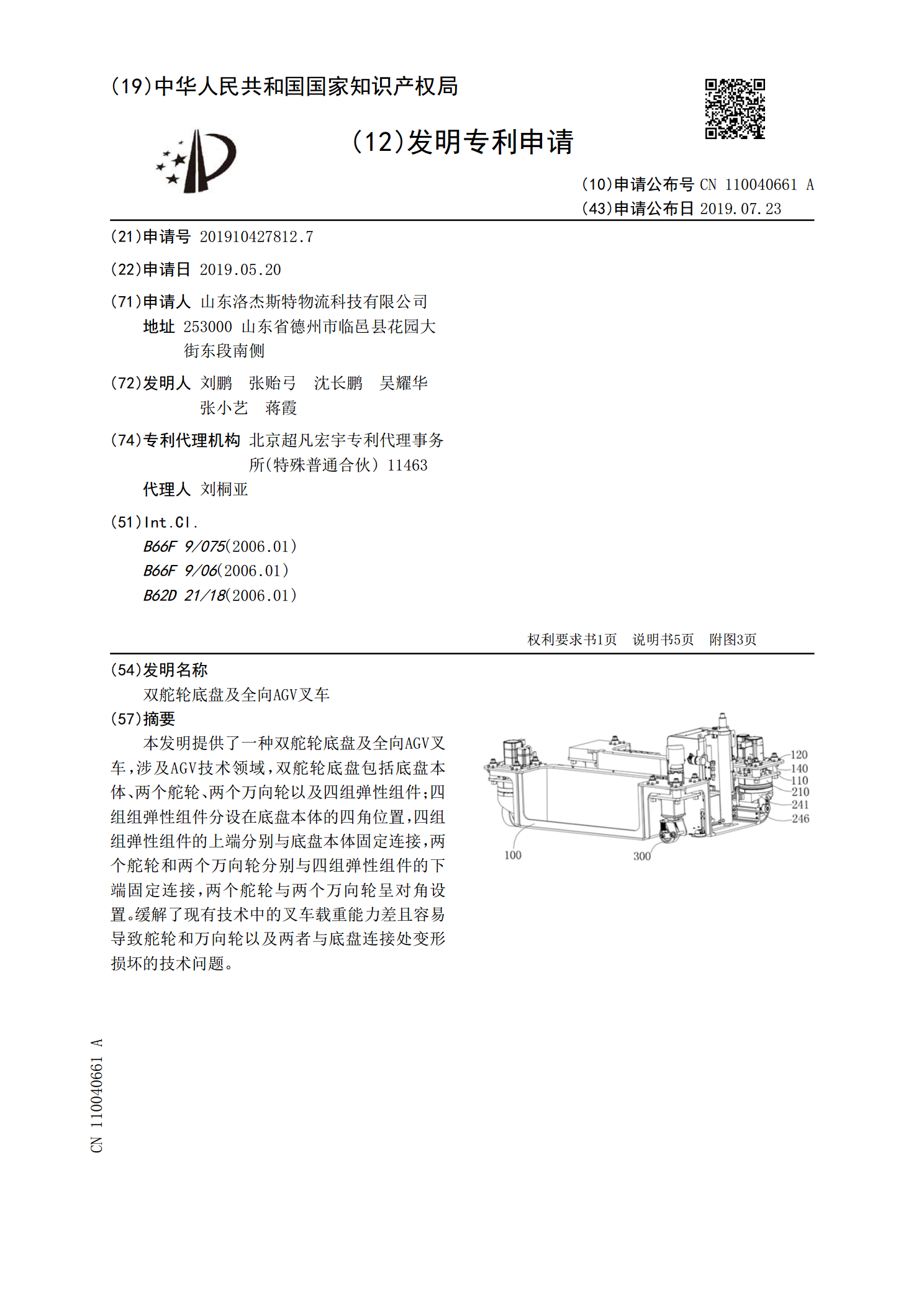
本发明提供了一种双舵轮底盘及全向AGV叉车,涉及AGV技术领域,双舵轮底盘包括底盘本体、两个舵轮、两个万向轮以及四组弹性组件;四组组弹性组件分设在底盘本体的四角位置,四组组弹性组件的上端分别与底盘本体固定连接,两个舵轮和两个万向轮分别与四组弹性组件的下端固定连接,两个舵轮与两个万向轮呈对角设置。缓解了现有技术中的叉车载重能力差且容易导致舵轮和万向轮以及两者与底盘连接处变形损坏的技术问题。
全向叉车AGV中基于舵轮与主动万向轮组合的底盘.pdf
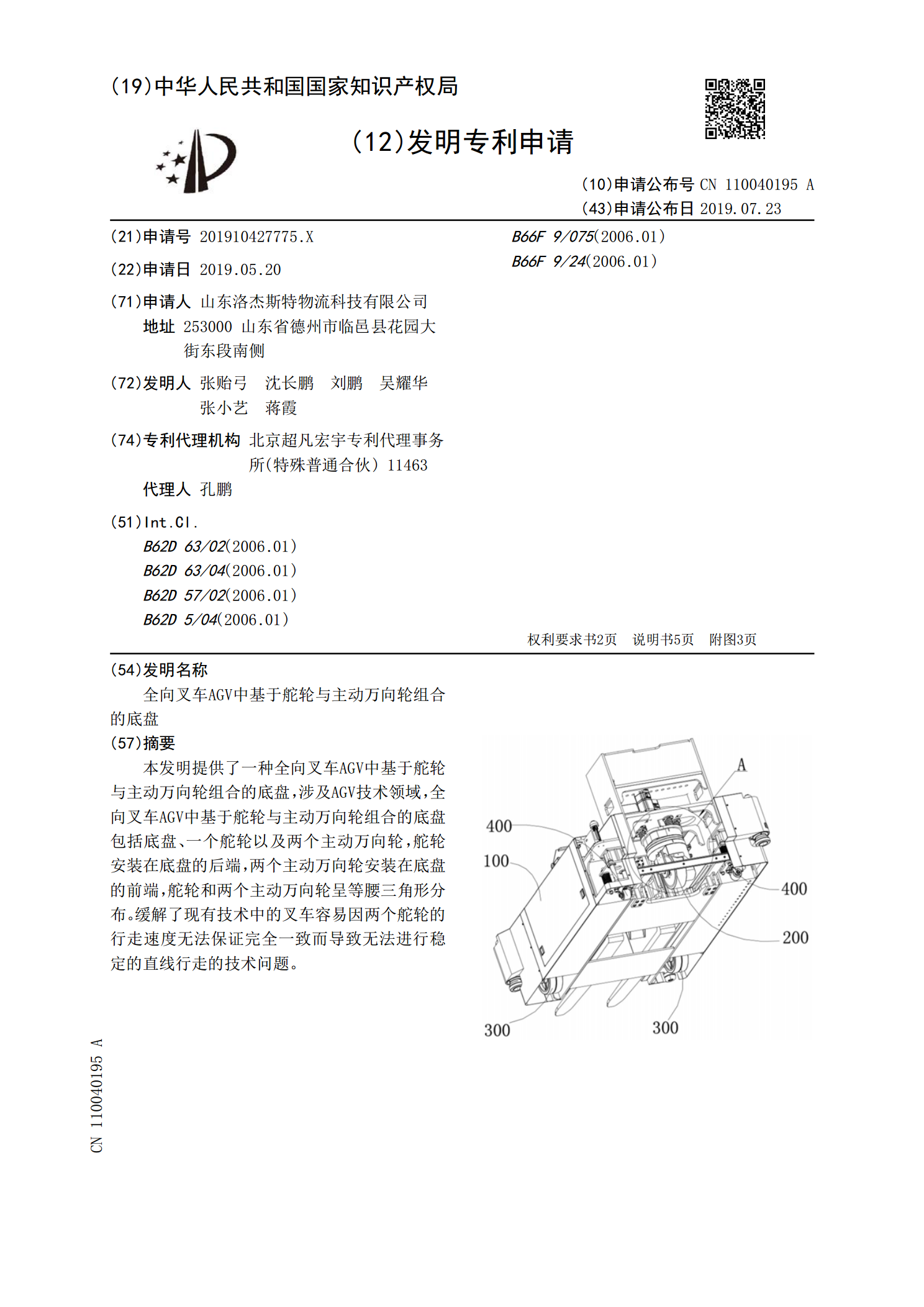
本发明提供了一种全向叉车AGV中基于舵轮与主动万向轮组合的底盘,涉及AGV技术领域,全向叉车AGV中基于舵轮与主动万向轮组合的底盘包括底盘、一个舵轮以及两个主动万向轮,舵轮安装在底盘的后端,两个主动万向轮安装在底盘的前端,舵轮和两个主动万向轮呈等腰三角形分布。缓解了现有技术中的叉车容易因两个舵轮的行走速度无法保证完全一致而导致无法进行稳定的直线行走的技术问题。
一种单驱动舵轮式全向AGV车.pdf
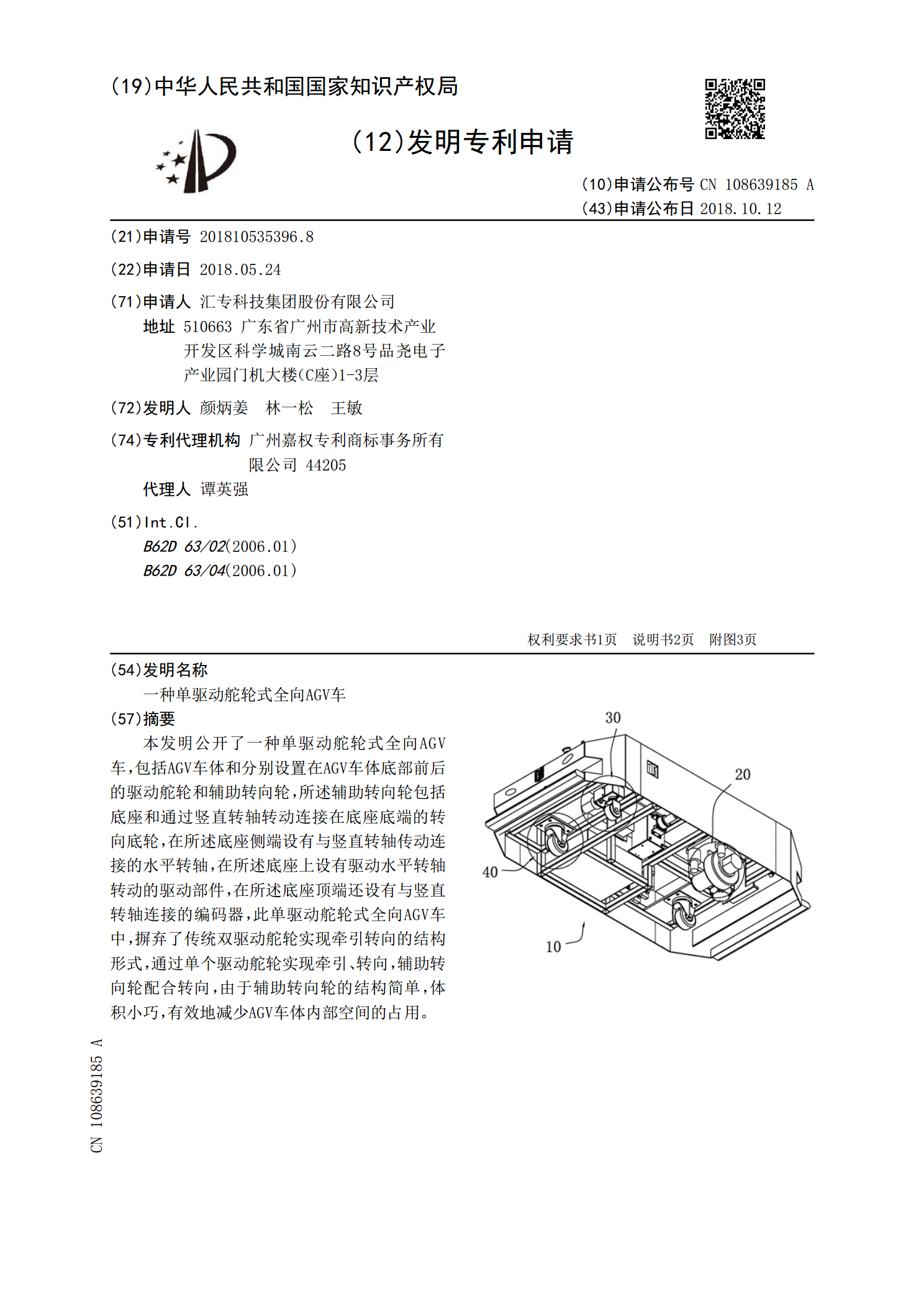
本发明公开了一种单驱动舵轮式全向AGV车,包括AGV车体和分别设置在AGV车体底部前后的驱动舵轮和辅助转向轮,所述辅助转向轮包括底座和通过竖直转轴转动连接在底座底端的转向底轮,在所述底座侧端设有与竖直转轴传动连接的水平转轴,在所述底座上设有驱动水平转轴转动的驱动部件,在所述底座顶端还设有与竖直转轴连接的编码器,此单驱动舵轮式全向AGV车中,摒弃了传统双驱动舵轮实现牵引转向的结构形式,通过单个驱动舵轮实现牵引、转向,辅助转向轮配合转向,由于辅助转向轮的结构简单,体积小巧,有效地减少AGV车体内部空间的占用。
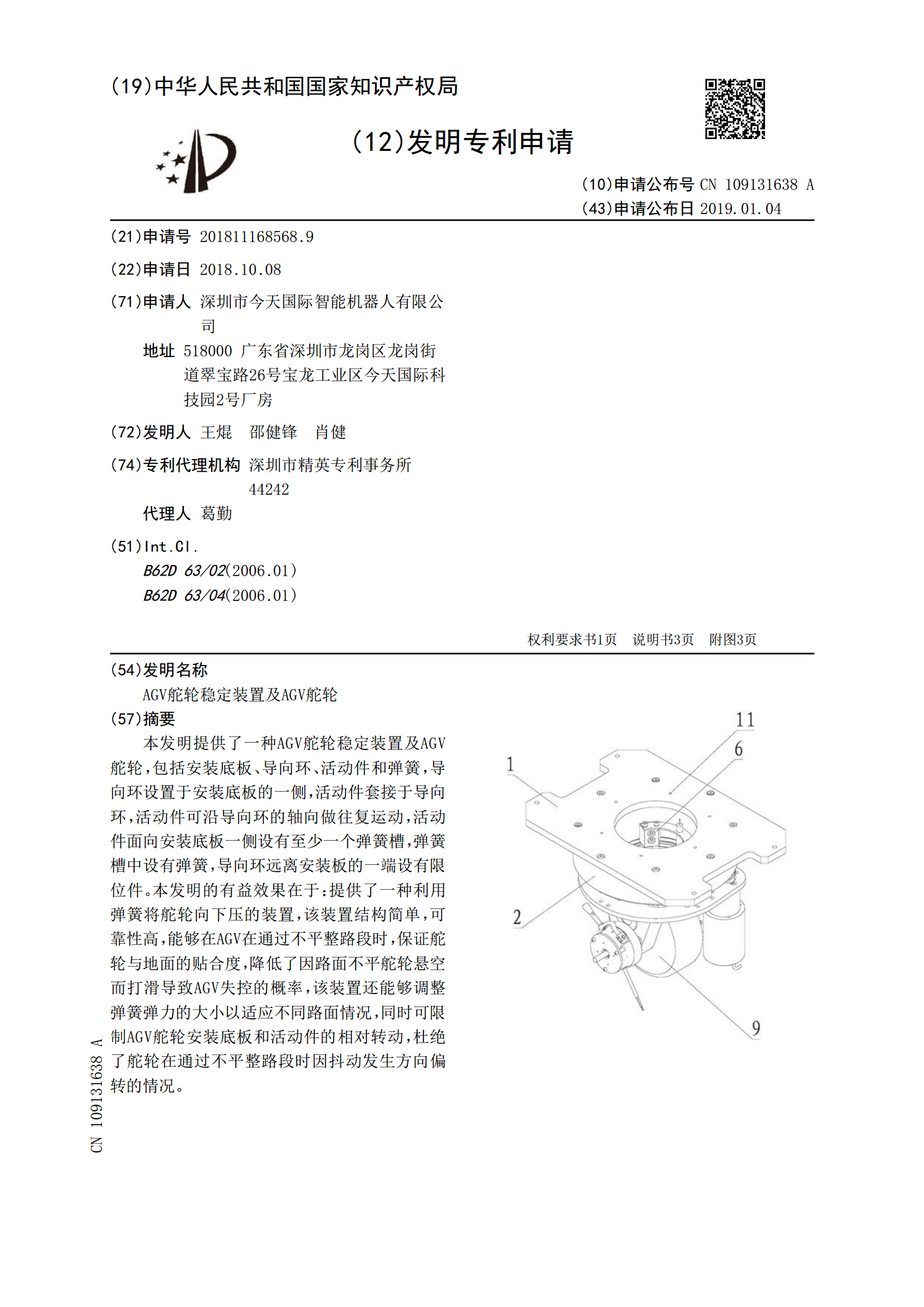
AGV舵轮稳定装置及AGV舵轮.pdf
本发明提供了一种AGV舵轮稳定装置及AGV舵轮,包括安装底板、导向环、活动件和弹簧,导向环设置于安装底板的一侧,活动件套接于导向环,活动件可沿导向环的轴向做往复运动,活动件面向安装底板一侧设有至少一个弹簧槽,弹簧槽中设有弹簧,导向环远离安装板的一端设有限位件。本发明的有益效果在于:提供了一种利用弹簧将舵轮向下压的装置,该装置结构简单,可靠性高,能够在AGV在通过不平整路段时,保证舵轮与地面的贴合度,降低了因路面不平舵轮悬空而打滑导致AGV失控的概率,该装置还能够调整弹簧弹力的大小以适应不同路面情况,同时可