
电动车转弯速度控制方法、系统和电动车.pdf

努力****晓骞

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
电动车转弯速度控制方法、系统和电动车.pdf
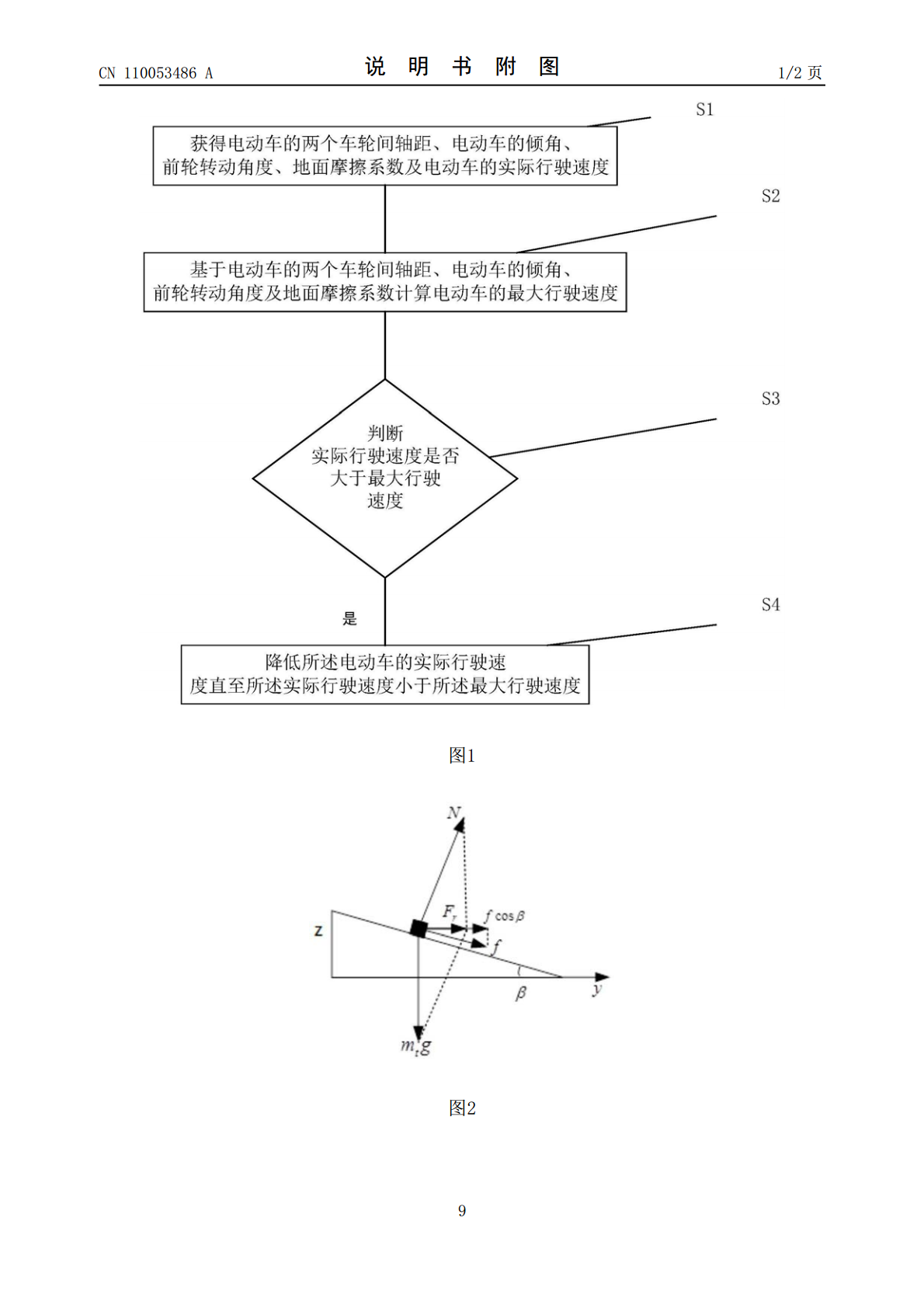
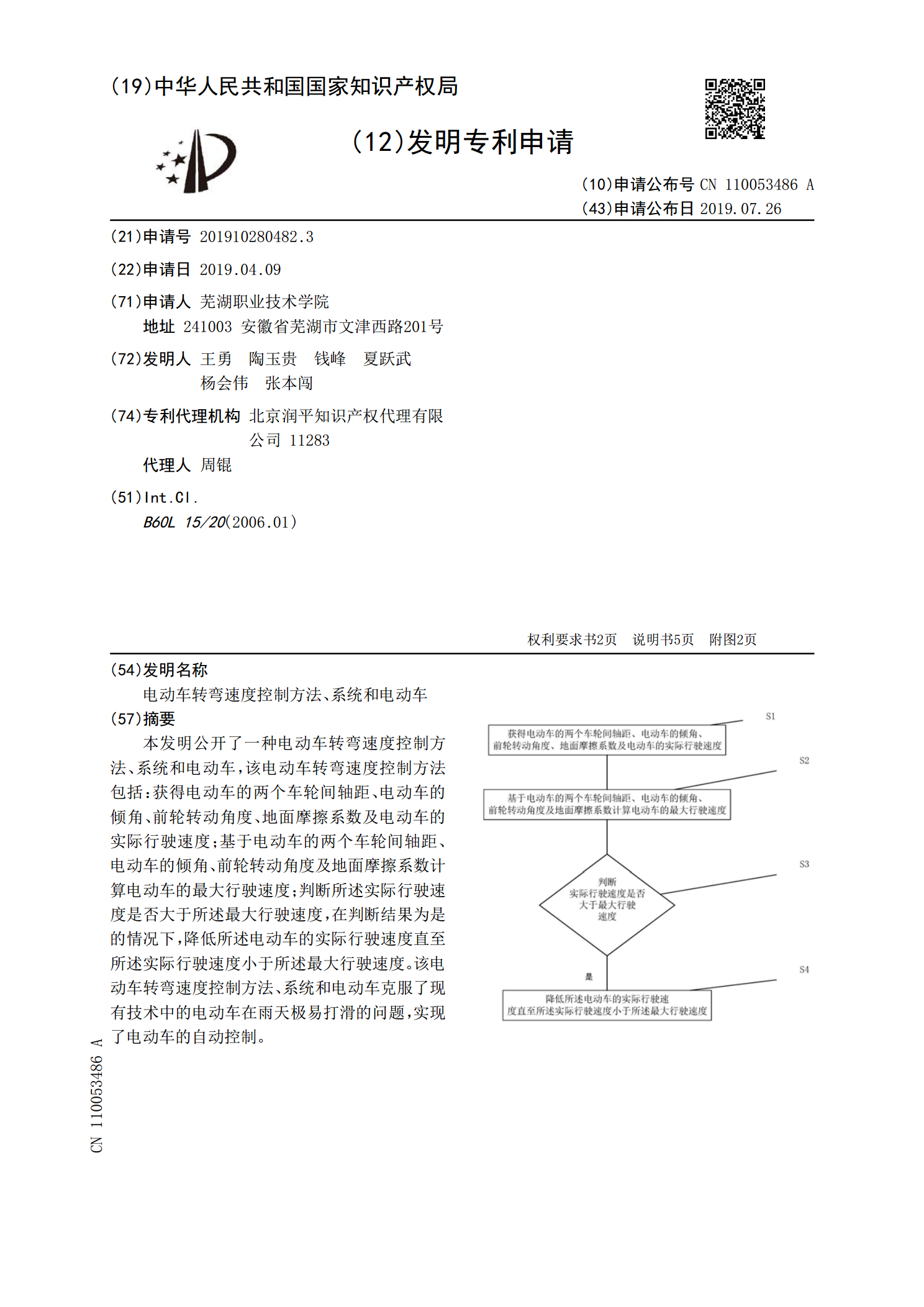
本发明公开了一种电动车转弯速度控制方法、系统和电动车,该电动车转弯速度控制方法包括:获得电动车的两个车轮间轴距、电动车的倾角、前轮转动角度、地面摩擦系数及电动车的实际行驶速度;基于电动车的两个车轮间轴距、电动车的倾角、前轮转动角度及地面摩擦系数计算电动车的最大行驶速度;判断所述实际行驶速度是否大于所述最大行驶速度,在判断结果为是的情况下,降低所述电动车的实际行驶速度直至所述实际行驶速度小于所述最大行驶速度。该电动车转弯速度控制方法、系统和电动车克服了现有技术中的电动车在雨天极易打滑的问题,实现了电动车的自

电动车档位控制系统、电动车档位控制方法和电动车.pdf
本发明提供了一种电动车档位控制系统,包括:转速检测单元,用于检测电动车的驱动轮转速和牙盘转速;比值计算单元,用于计算出所述驱动轮转速和所述牙盘转速的比值;比较单元,用于将所述比值与所有预设变速比进行比较,确定与所述比值最接近的预设变速比;获取单元,用于获取与所述比值最接近的预设变速比对应的预设档位;控制器,用于控制电驱动系统根据所述预设档位对应的输出功率工作。本发明还提出了一种电动车档位控制方法和一种电动车。通过本发明的技术方案,能够避免用户空踩脚踏板,提高骑行乐趣和舒适性,并且能够减缓电池电量的消耗。

电动车辆的自动驻车系统、电动车辆和控制方法.pdf
本发明公开了一种电动车辆的自动驻车系统、电动车辆和控制方法,包括空压装置、前储气组件、后储气组件、对应各车轮设置的第一前轮制动气室、第二前轮制动气室、第一后轮制动气室、第二后轮制动气室、阀门组件在制动踏板被踩下时通过第一电磁阀和第二电磁阀将前储气组件储存的压缩空气分别导入到第一前轮制动气室和第二前轮制动气室,以完成前轮制动,同时通过第三电磁阀和第四电磁阀完成后轮制动;控制模块在接收到自动驻车指令并判断满足条件时控制电磁阀关闭,使电动车辆维持制动状态;从而实现对电动车辆进行自动驻车制动,防止驾驶员因长时间采
电动车辆的控制装置、电动车辆的控制系统及电动车辆的控制方法.pdf
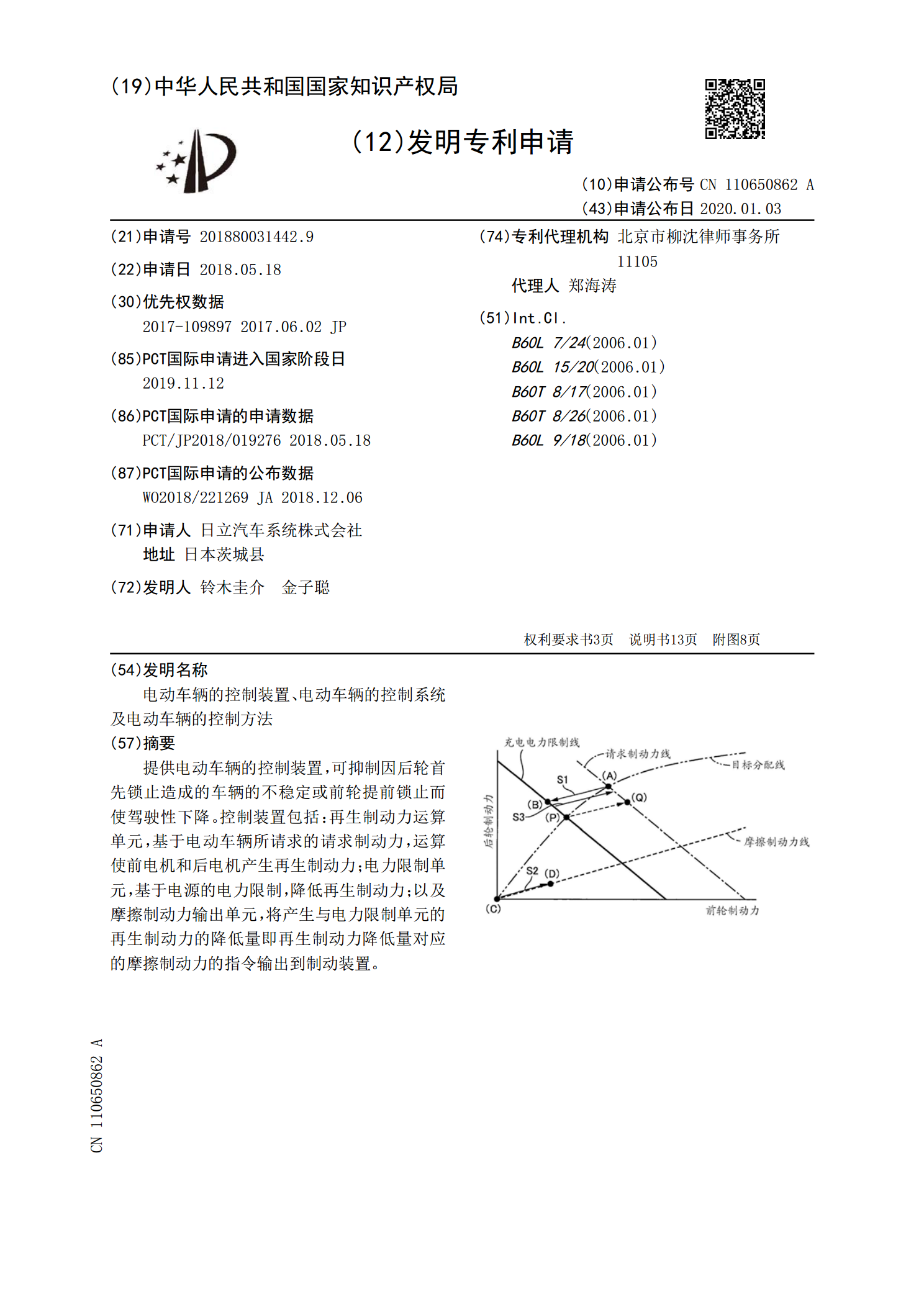
提供电动车辆的控制装置,可抑制因后轮首先锁止造成的车辆的不稳定或前轮提前锁止而使驾驶性下降。控制装置包括:再生制动力运算单元,基于电动车辆所请求的请求制动力,运算使前电机和后电机产生再生制动力;电力限制单元,基于电源的电力限制,降低再生制动力;以及摩擦制动力输出单元,将产生与电力限制单元的再生制动力的降低量即再生制动力降低量对应的摩擦制动力的指令输出到制动装置。
电动车辆的控制装置、电动车辆的控制系统及电动车辆的控制方法.pdf
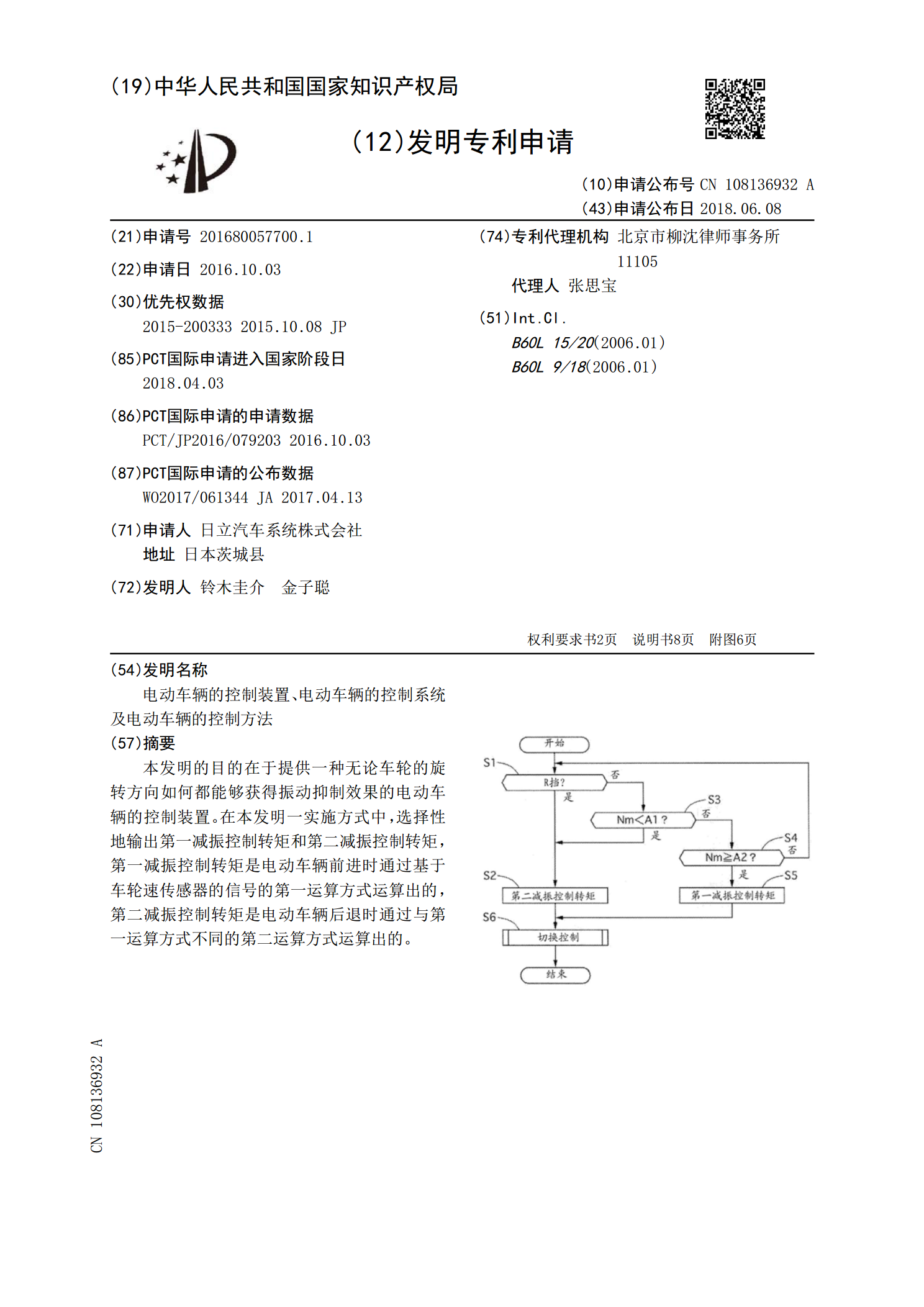
本发明的目的在于提供一种无论车轮的旋转方向如何都能够获得振动抑制效果的电动车辆的控制装置。在本发明一实施方式中,选择性地输出第一减振控制转矩和第二减振控制转矩,第一减振控制转矩是电动车辆前进时通过基于车轮速传感器的信号的第一运算方式运算出的,第二减振控制转矩是电动车辆后退时通过与第一运算方式不同的第二运算方式运算出的。