
一种叉车驱动转向系统.pdf

mm****酱吖

1/9
2/9
3/9
4/9
5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种叉车驱动转向系统.pdf
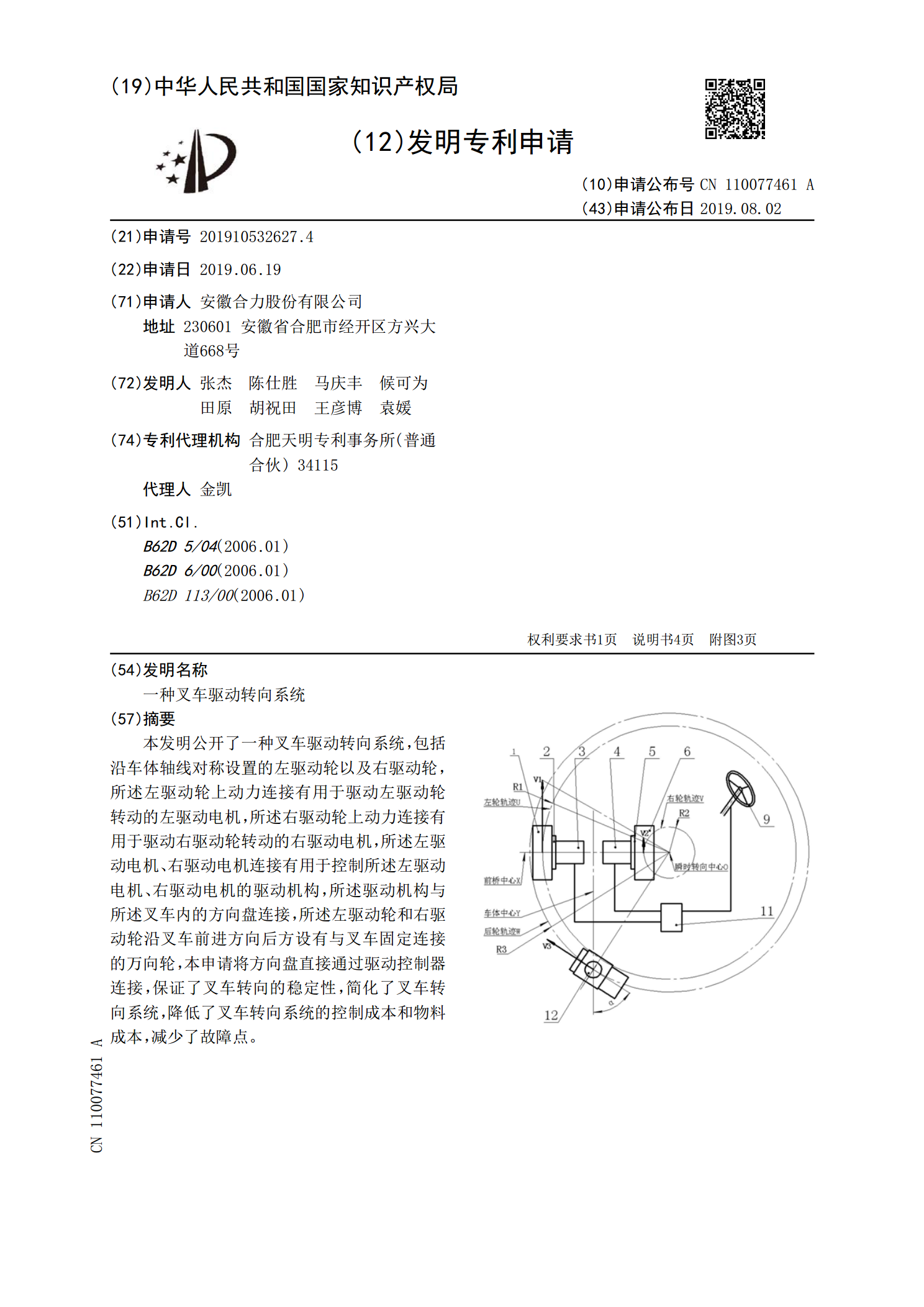
本发明公开了一种叉车驱动转向系统,包括沿车体轴线对称设置的左驱动轮以及右驱动轮,所述左驱动轮上动力连接有用于驱动左驱动轮转动的左驱动电机,所述右驱动轮上动力连接有用于驱动右驱动轮转动的右驱动电机,所述左驱动电机、右驱动电机连接有用于控制所述左驱动电机、右驱动电机的驱动机构,所述驱动机构与所述叉车内的方向盘连接,所述左驱动轮和右驱动轮沿叉车前进方向后方设有与叉车固定连接的万向轮,本申请将方向盘直接通过驱动控制器连接,保证了叉车转向的稳定性,简化了叉车转向系统,降低了叉车转向系统的控制成本和物料成本,减少了故

一种叉车用转向桥及叉车转向系统.pdf
本发明涉及叉车的技术领域,并具体公开一种叉车用转向桥及叉车转向系统,转向桥包括:转向桥体,两端分别与第一转向轮以及第二转向轮铰接;摆臂组件,包括一端与第一转向轮铰接的第一摆臂、一端与第二转向轮铰接的第二摆臂以及同时与第一摆臂和第二摆臂铰接的转向摇板,所述第一摆臂和第二摆臂对称分布在转向摇板的两侧;驱动组件,包括一驱动杆,驱动杆与转向摇板相接,并用于驱动转向摇板转动;可通过驱动杆带动转向摇板转动,在转向摇板的转动过程中,便会驱动第一摆臂和第二摆臂动作,且在转动过程中,第一摆臂和第二摆臂的倾斜角度不一致,使得
一种越野叉车后转向驱动桥.pdf
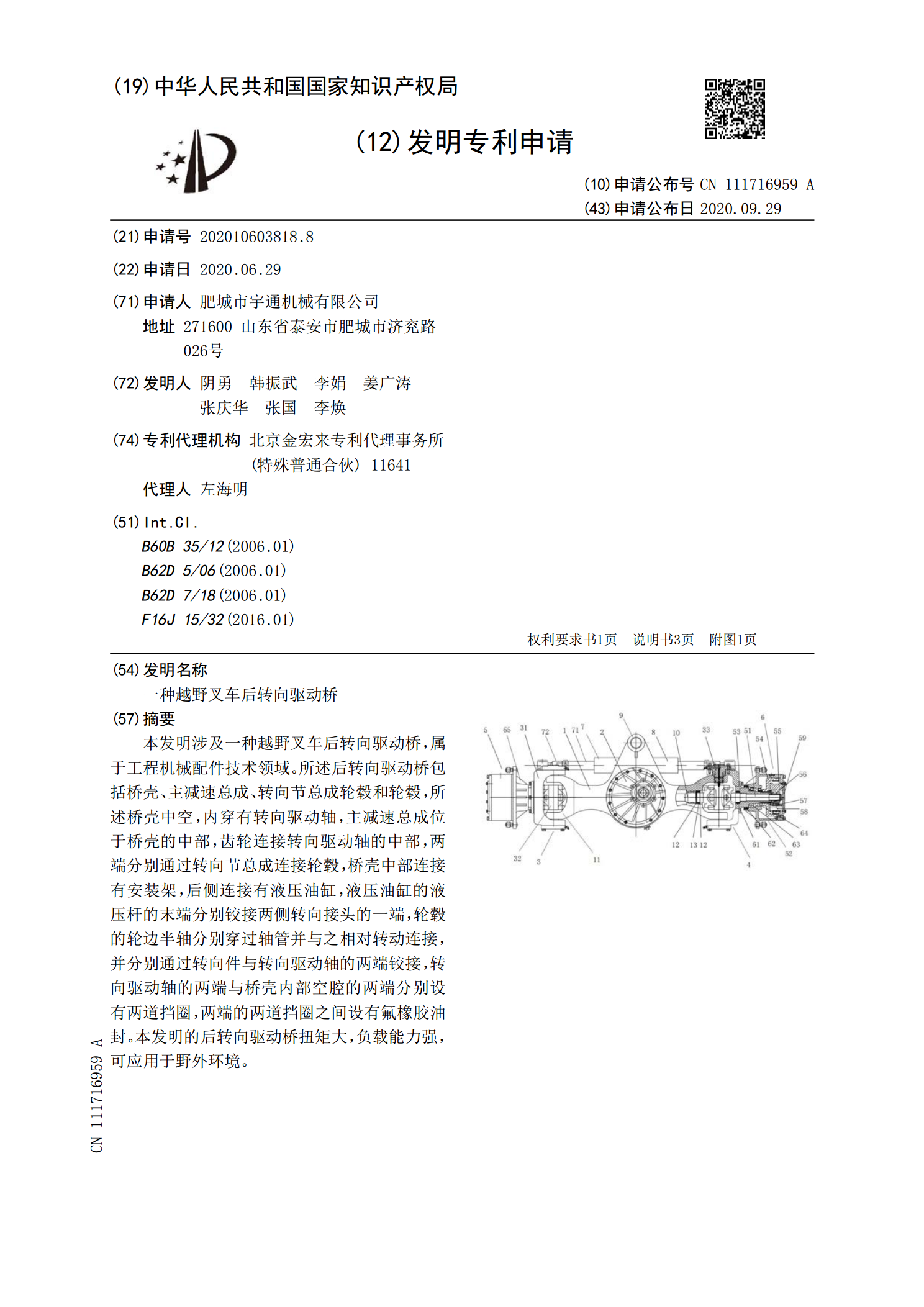
本发明涉及一种越野叉车后转向驱动桥,属于工程机械配件技术领域。所述后转向驱动桥包括桥壳、主减速总成、转向节总成轮毂和轮毂,所述桥壳中空,内穿有转向驱动轴,主减速总成位于桥壳的中部,齿轮连接转向驱动轴的中部,两端分别通过转向节总成连接轮毂,桥壳中部连接有安装架,后侧连接有液压油缸,液压油缸的液压杆的末端分别铰接两侧转向接头的一端,轮毂的轮边半轴分别穿过轴管并与之相对转动连接,并分别通过转向件与转向驱动轴的两端铰接,转向驱动轴的两端与桥壳内部空腔的两端分别设有两道挡圈,两端的两道挡圈之间设有氟橡胶油封。本发明
一种双驱动叉车行驶转向监测及控制系统.pdf
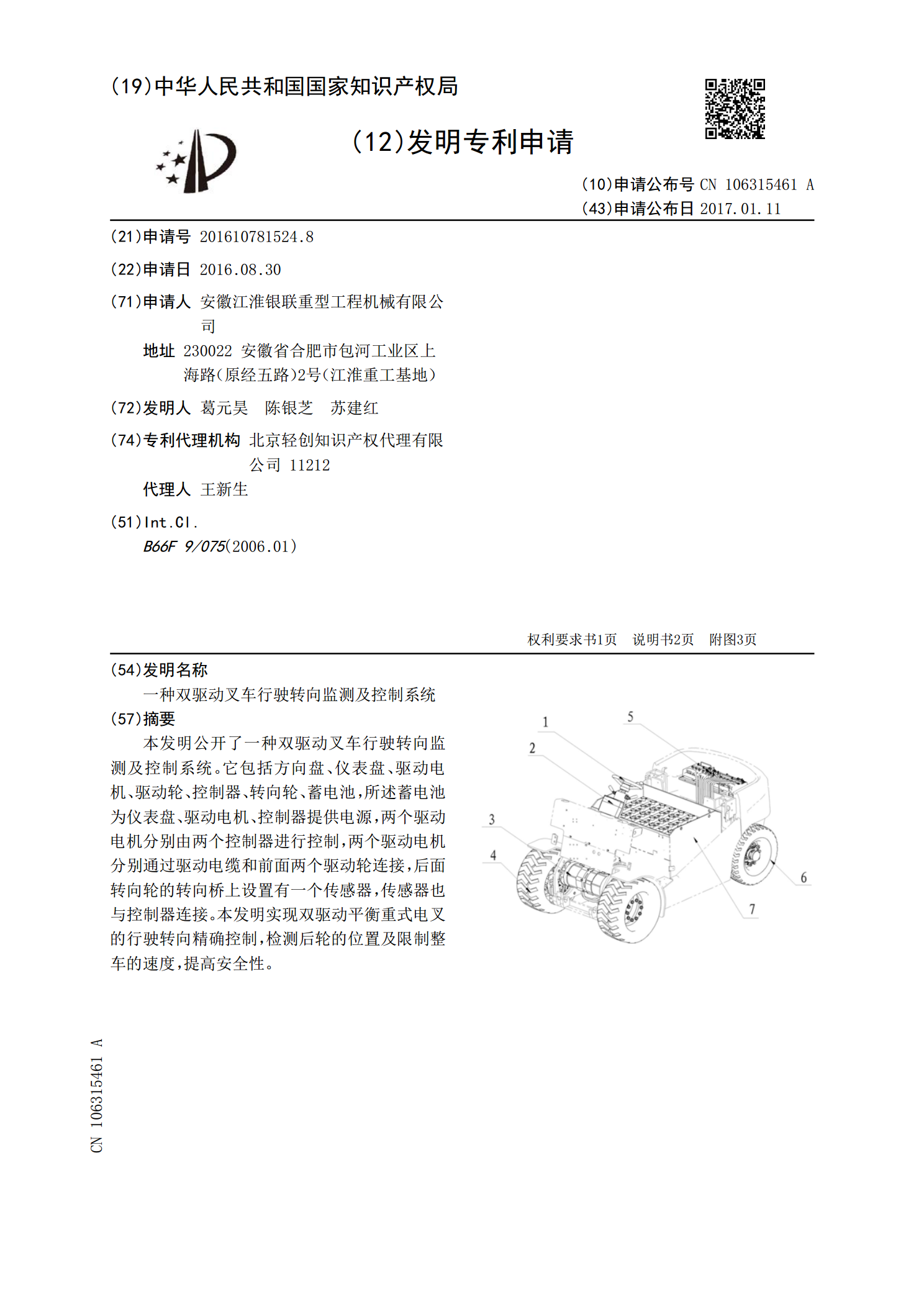
本发明公开了一种双驱动叉车行驶转向监测及控制系统。它包括方向盘、仪表盘、驱动电机、驱动轮、控制器、转向轮、蓄电池,所述蓄电池为仪表盘、驱动电机、控制器提供电源,两个驱动电机分别由两个控制器进行控制,两个驱动电机分别通过驱动电缆和前面两个驱动轮连接,后面转向轮的转向桥上设置有一个传感器,传感器也与控制器连接。本发明实现双驱动平衡重式电叉的行驶转向精确控制,检测后轮的位置及限制整车的速度,提高安全性。
一种叉车的转向系统.pdf
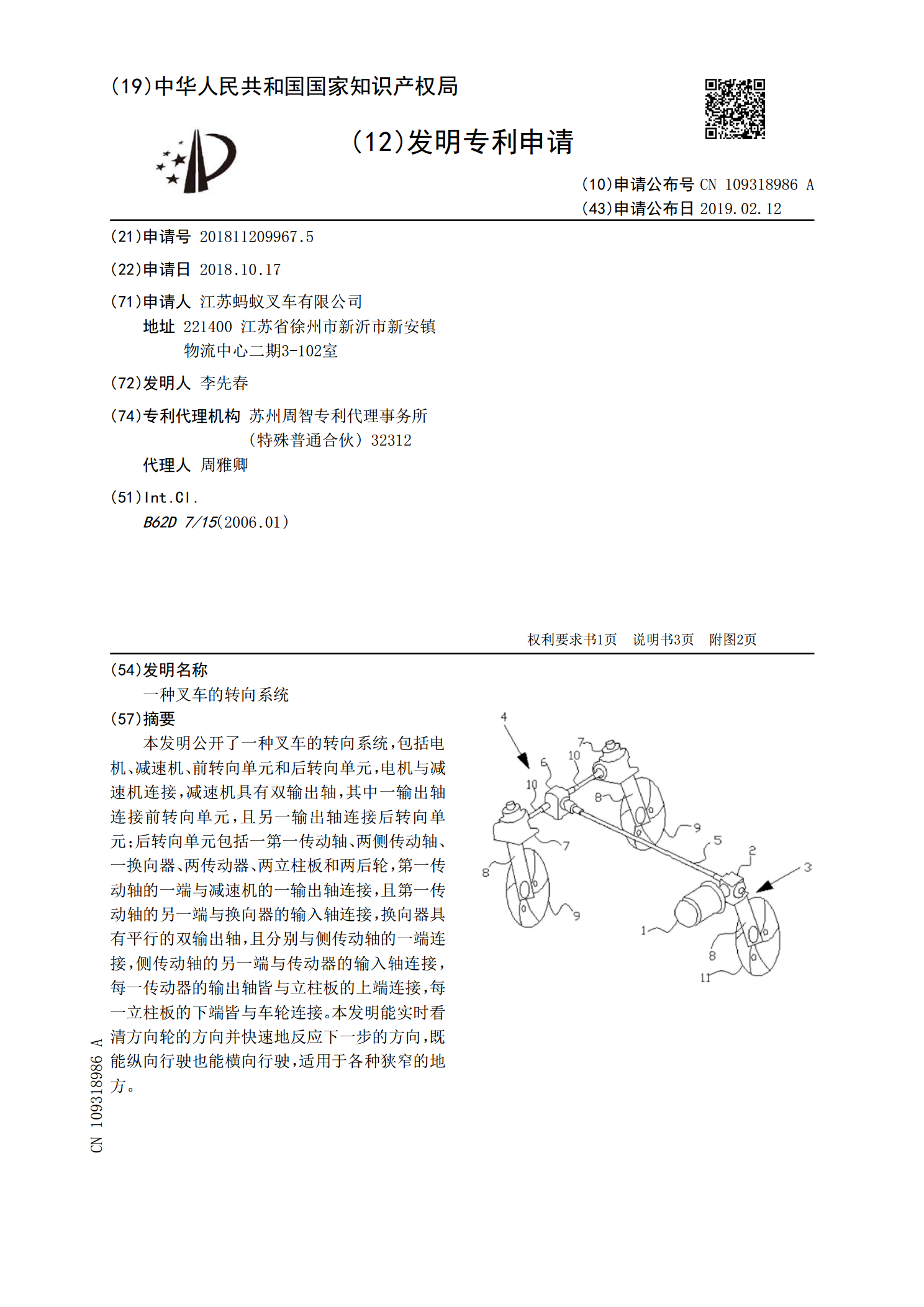
本发明公开了一种叉车的转向系统,包括电机、减速机、前转向单元和后转向单元,电机与减速机连接,减速机具有双输出轴,其中一输出轴连接前转向单元,且另一输出轴连接后转向单元;后转向单元包括一第一传动轴、两侧传动轴、一换向器、两传动器、两立柱板和两后轮,第一传动轴的一端与减速机的一输出轴连接,且第一传动轴的另一端与换向器的输入轴连接,换向器具有平行的双输出轴,且分别与侧传动轴的一端连接,侧传动轴的另一端与传动器的输入轴连接,每一传动器的输出轴皆与立柱板的上端连接,每一立柱板的下端皆与车轮连接。本发明能实时看清方向