
基于轮廓扫描的车辆形位检测系统及方法.pdf

是你****盟主


1/10

2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于轮廓扫描的车辆形位检测系统及方法.pdf
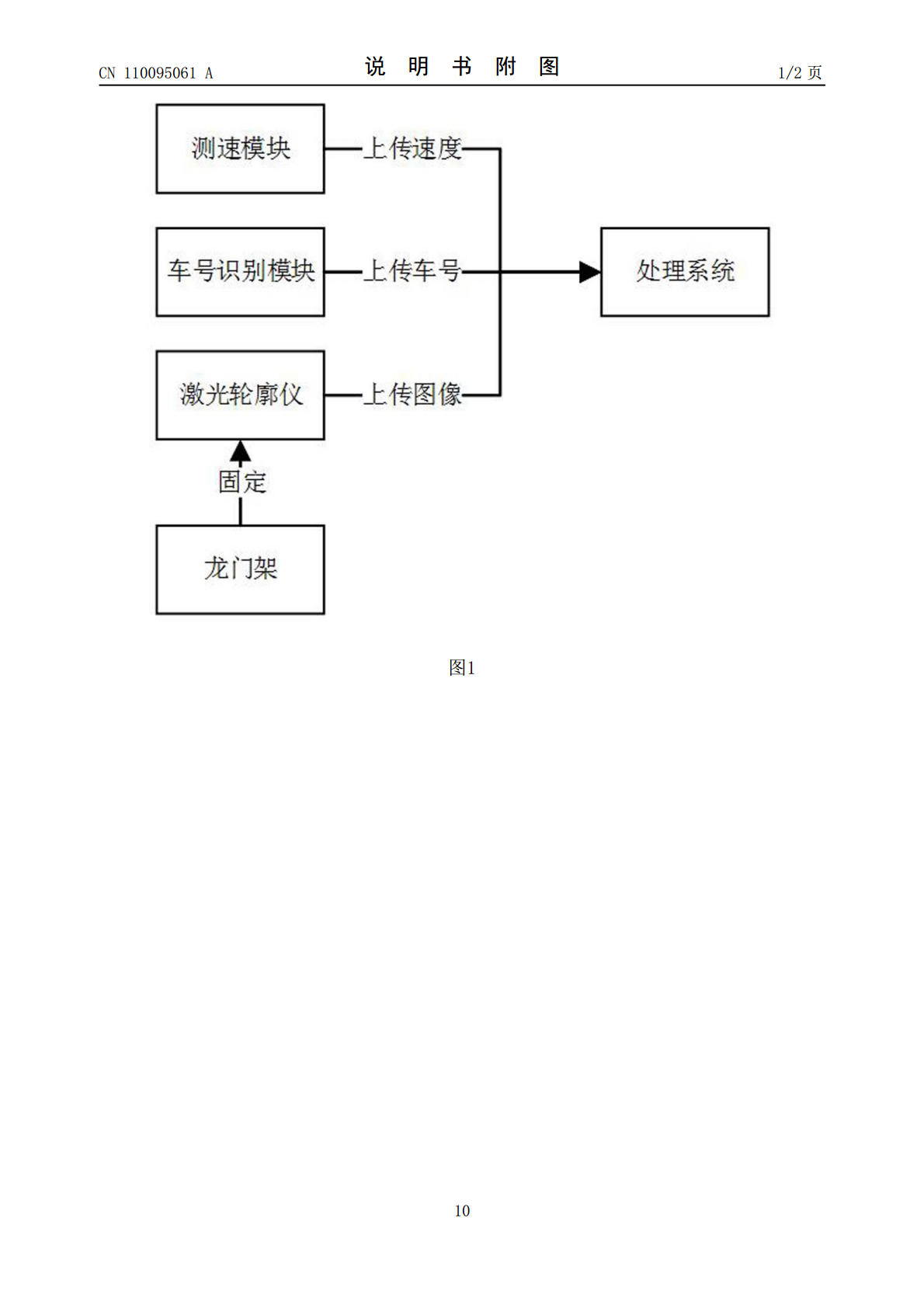
本发明涉及一种基于轮廓扫描的车辆形位检测系统及方法。该系统包括车号识别模块、测速模块、激光轮廓仪、龙门架、处理系统;该方法包括激光轮廓仪对轨道上运行的车辆进行轮廓扫描、通过激光图像和车速计算出3D点云图;通过车号在数据库中匹配车辆信息,得到标准3D点云图;通过对比点云图对车辆的外形尺寸和外部零件进行检测。本发明通过激光扫描车辆能够适应较恶劣的环境,具有很强的抗干扰能力,是一种非接触式、不影响设备运行的检测方法;采用3D点云计算,不仅能测量出各个尺寸,而且传感器安装简单;采用三维匹配技术,识别准确性更高;能

基于激光扫描技术的行使车辆轮廓数据采集方法及系统.pdf
本发明提供一种基于激光扫描技术的行使车辆轮廓数据采集方法及系统,该方法包括:采集单车道或多车道的行使车辆的宽度和高度,形成宽高数据;在采集宽度和高度的同时或之后采集该行使车辆的长度,形成长度数据;对当前宽高数据进行判断,若当前宽高数据被持续检测到,则合并长宽高数据;若当前宽高数据未被检测到,则判断是否有宽高数据,若有则合并长宽高数据,若无则返回继续检测。本发明通过激光扫描传感器的不同扫描角度同时采集数据,实现不停车对多个车辆进行轮廓扫描,并对数据进行转换合并,生成车辆轮廓数据,提升整体效率。

基于径向扫描结合环向扫描的摆臂轮廓面形检测方法.pdf
本发明公开了一种基于径向扫描结合环向扫描的摆臂轮廓面形检测方法,利用基于Forbes多项式拟合的方法对被检元件表面特征进行描述,获得被检元件在非解析表达下的表面梯度分布;建立表面梯度与被检元件特征轮廓的数学模型,提取被检元件特征轮廓线;对提取的特征轮廓线按照径向和环向分别进行测量路径的规划;用摆臂轮廓仪的探针对被检元件按规划的测量路径分别进行径向扫描和环向扫描,获得被检元件的一维特征轮廓数据;利用面形偏差拟合重构算法将被检元件的一维特征轮廓数据进行插值、拟合、重构,最终得到被检元件的二维全面形。该方法具有
砂轮廓形原位检测系统、方法以及砂轮廓形误差补偿方法.pdf
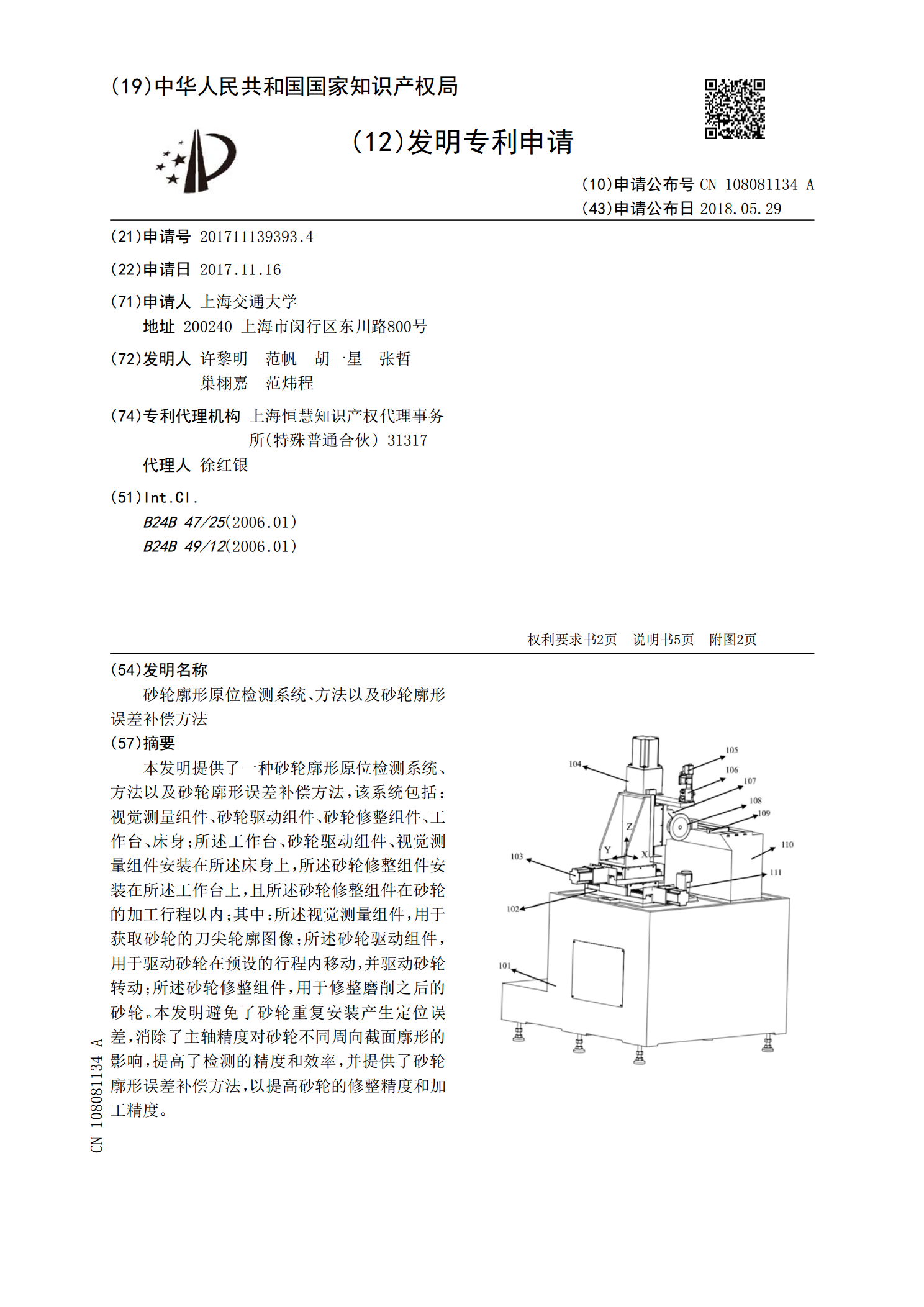
本发明提供了一种砂轮廓形原位检测系统、方法以及砂轮廓形误差补偿方法,该系统包括:视觉测量组件、砂轮驱动组件、砂轮修整组件、工作台、床身;所述工作台、砂轮驱动组件、视觉测量组件安装在所述床身上,所述砂轮修整组件安装在所述工作台上,且所述砂轮修整组件在砂轮的加工行程以内;其中:所述视觉测量组件,用于获取砂轮的刀尖轮廓图像;所述砂轮驱动组件,用于驱动砂轮在预设的行程内移动,并驱动砂轮转动;所述砂轮修整组件,用于修整磨削之后的砂轮。本发明避免了砂轮重复安装产生定位误差,消除了主轴精度对砂轮不同周向截面廓形的影响,

基于线激光检测技术的车辆关键部件形位检测方法.pdf
基于线激光检测技术的车辆关键部件形位检测方法,涉及轨道交通领域,包括如下步骤:S1、选择一个需要检测的车辆关键部位A;S2、在A处选取至少一个参照物B,A相对B存在位置关系的变化;S3、向A和B发射同一道线激光;S4、线激光到达A和B表面的距离构成二维轮廓曲线;S5、获取A和B初始位置时的初始二维轮廓曲线及A和B实时位置的实时二维轮廓曲线;S6、在同一位置时,初始二维轮廓曲线上A相对于B的位置关系为D0,实时二维轮廓曲线A相对于B的位置关系为Di,Di与D0的差异即为A的位置变化量。本发明实现方式简单可操