
砂轮廓形原位检测系统、方法以及砂轮廓形误差补偿方法.pdf

猫巷****熙柔

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
砂轮廓形原位检测系统、方法以及砂轮廓形误差补偿方法.pdf
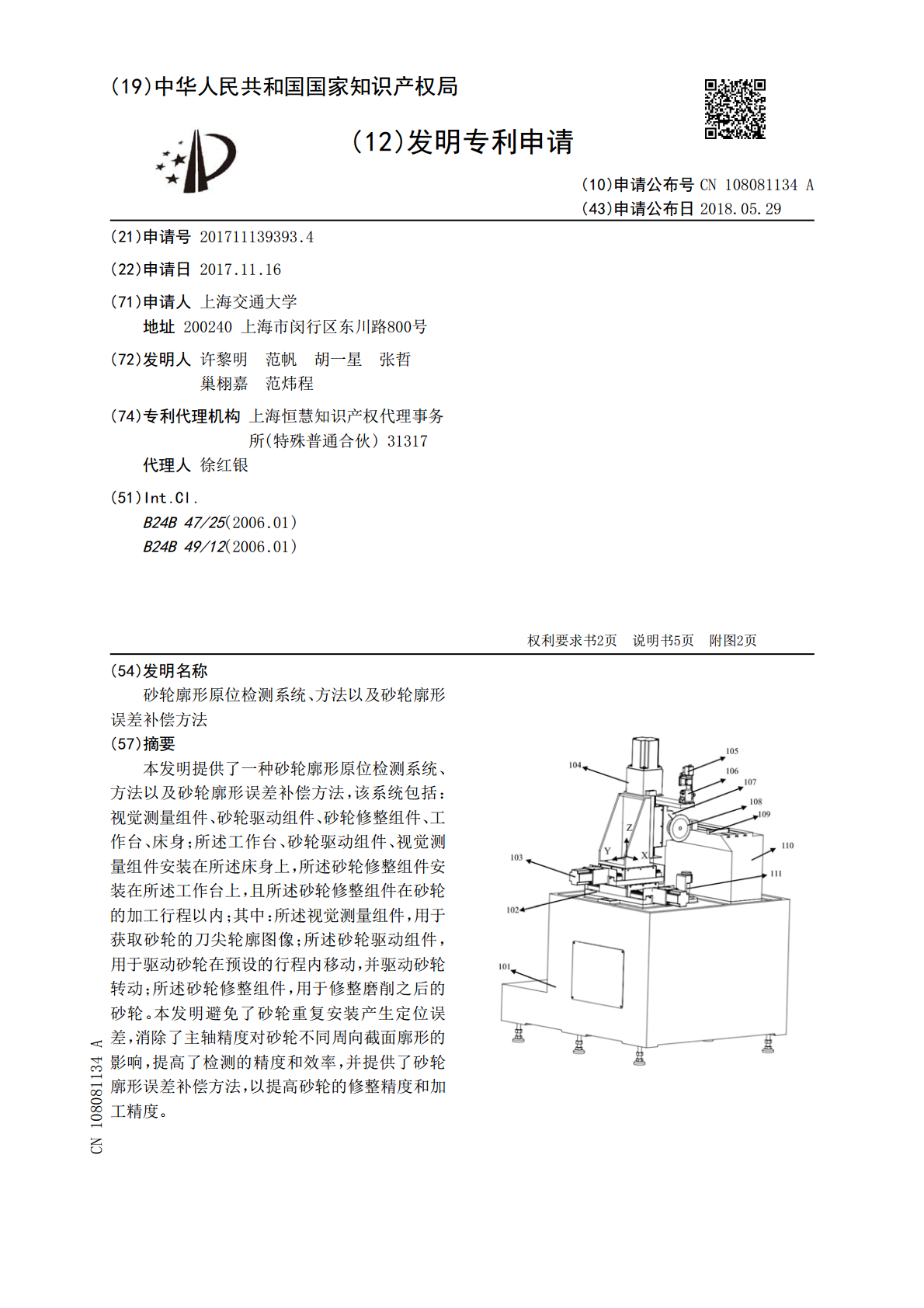
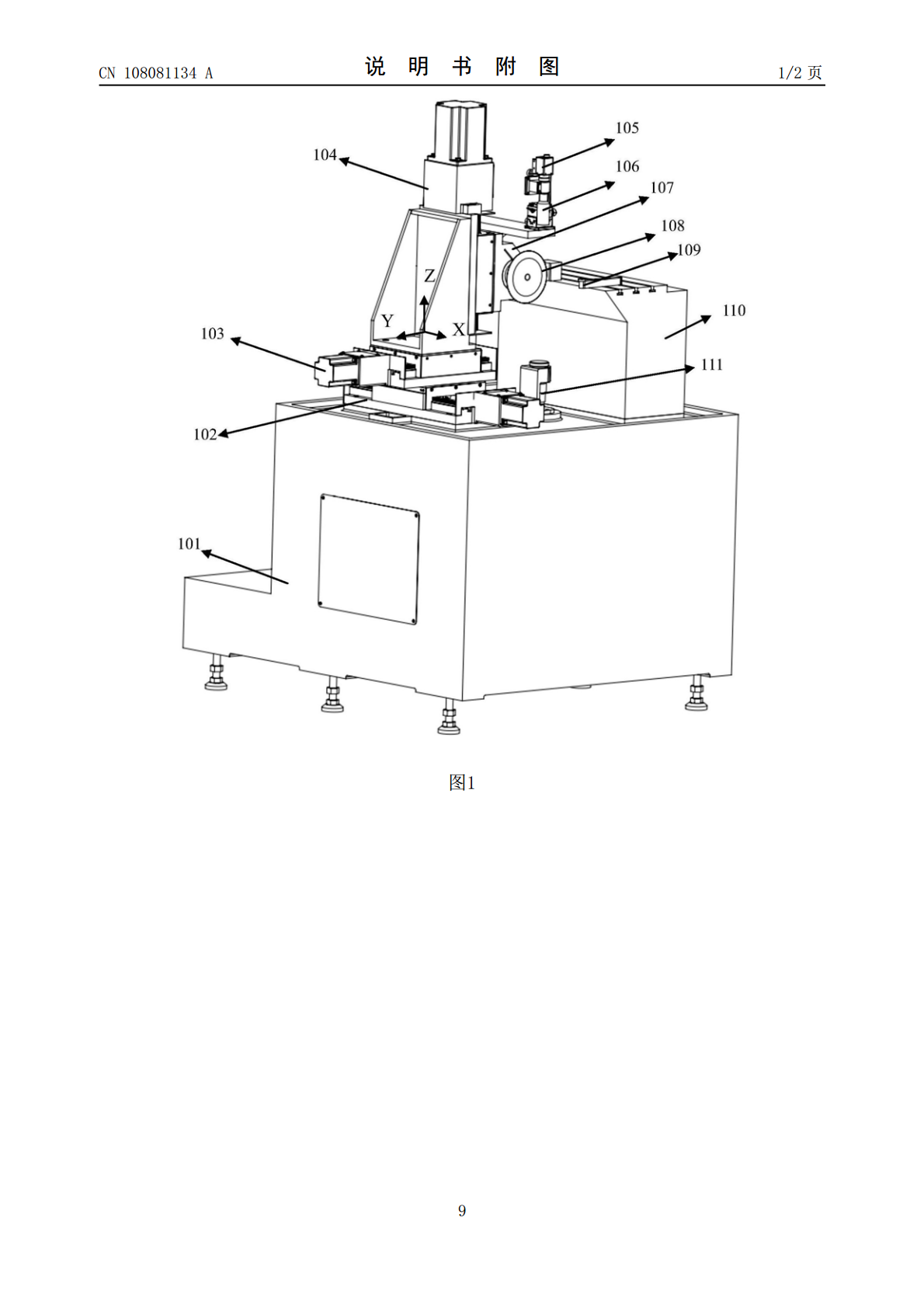
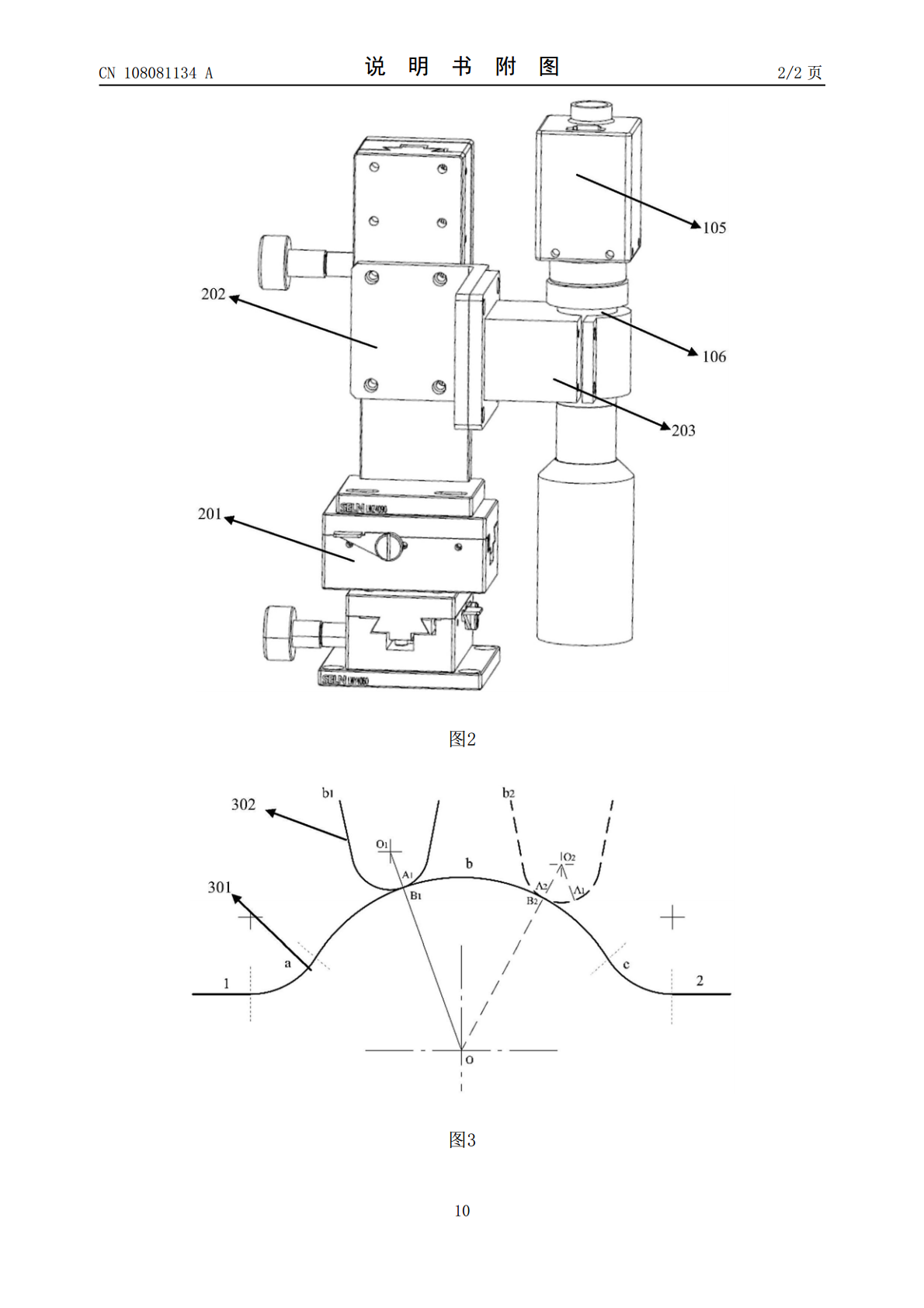
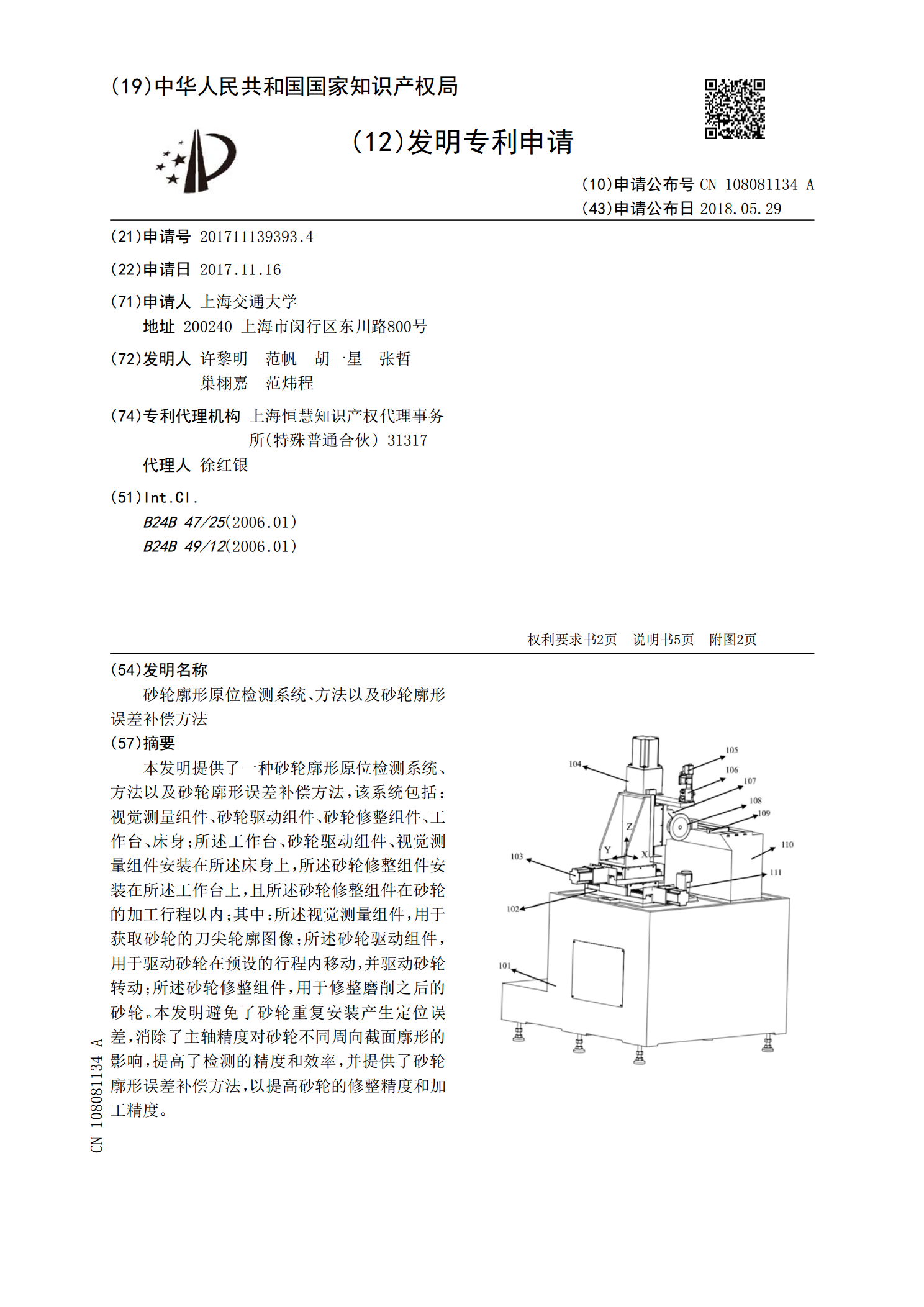
本发明提供了一种砂轮廓形原位检测系统、方法以及砂轮廓形误差补偿方法,该系统包括:视觉测量组件、砂轮驱动组件、砂轮修整组件、工作台、床身;所述工作台、砂轮驱动组件、视觉测量组件安装在所述床身上,所述砂轮修整组件安装在所述工作台上,且所述砂轮修整组件在砂轮的加工行程以内;其中:所述视觉测量组件,用于获取砂轮的刀尖轮廓图像;所述砂轮驱动组件,用于驱动砂轮在预设的行程内移动,并驱动砂轮转动;所述砂轮修整组件,用于修整磨削之后的砂轮。本发明避免了砂轮重复安装产生定位误差,消除了主轴精度对砂轮不同周向截面廓形的影响,

盘形凸轮轮廓检测方法.pdf
本发明公开了一种盘形凸轮轮廓检测方法,该方法能适应不同的盘形凸轮轮廓的检测,尤其可以用于平面共轭凸轮的内外轮廓的检测。采用的凸轮加工检测设备包括控制系统、机身、工作台机构、凸轮旋转机构和检测磨削装置。所述控制系统控制工作台机构、凸轮旋转机构和检测磨削装置的动作。在线检测装置包括凸轮外轮廓在线检测装置和凸轮内轮廓在线检测装置。凸轮外轮廓在线检测装置由控制系统通过第一直线电机驱动器控制第一直线电机的动子带动第一激光测量头进行X向移动测量平面共轭凸轮的外轮廓尺寸。凸轮内轮廓在线检测装置由控制系统通过第二直线电机

一种曲线轮廓误差补偿的调节控制系统及误差补偿的方法.pdf
本发明公开了一种曲线交叉耦合轮廓误差补偿的调节控制系统,包括数控PC、曲线交叉耦合轮廓误差补偿调节运动控制卡、驱动器、伺服电机模块及位置反馈检测模块。所述的数控PC包括数控PC机、显示器及PCI接口芯片;一端与显示器相连实现人机对话,另一端通过PCI接口芯片与曲线交叉耦合轮廓误差补偿调节运动控制卡相连接,实现曲线交叉耦合轮廓误差的补偿。同时,本发明还公开了一种曲线交叉耦合轮廓误差补偿的控制方法。本发明具有调节控制效率高、稳定性好及实用性强等特点,通过调节参数p实现曲线轮廓误差交叉耦合的补偿;同时,该轮廓误
随动与轮廓误差在线协同补偿方法.pdf
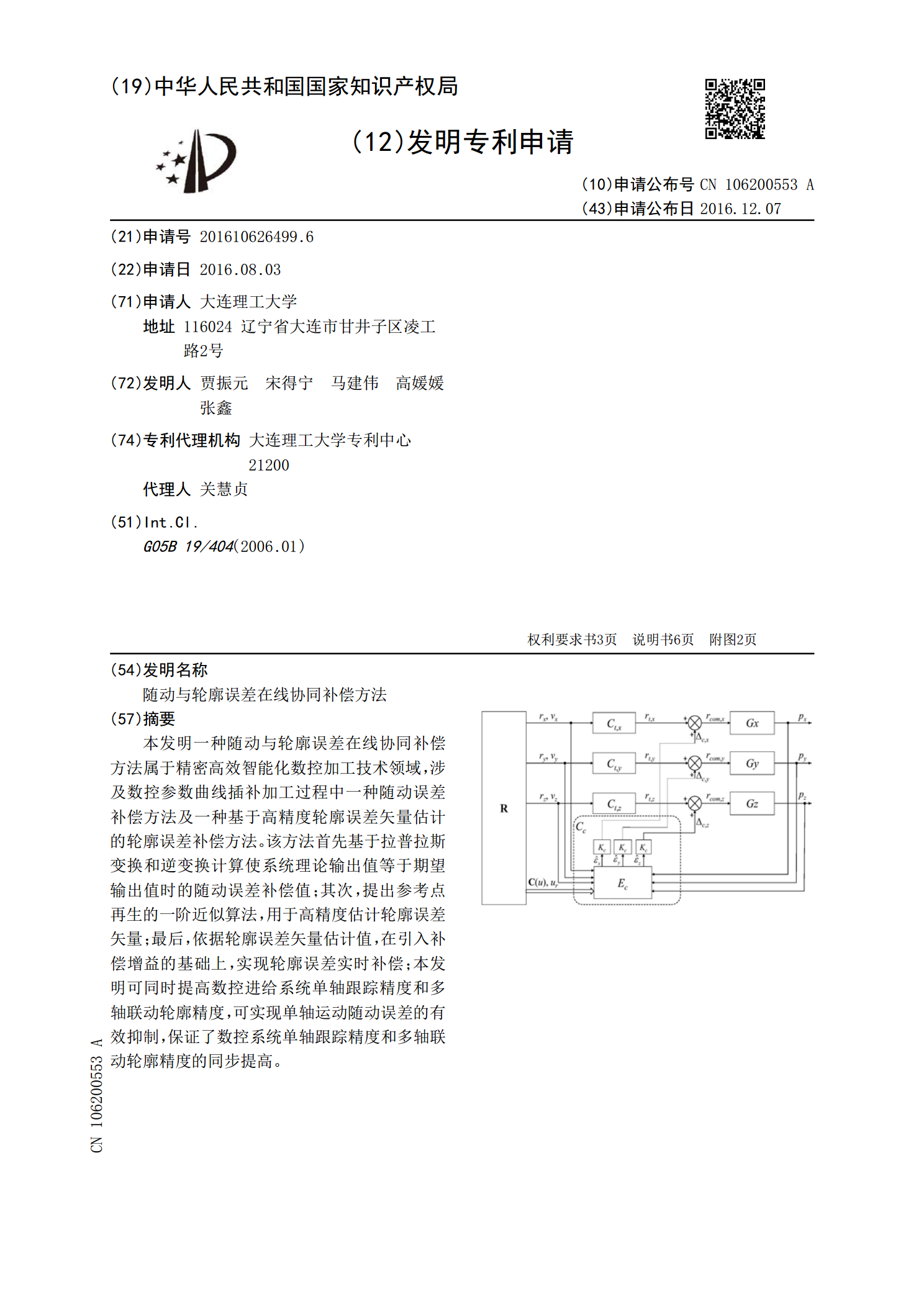
本发明一种随动与轮廓误差在线协同补偿方法属于精密高效智能化数控加工技术领域,涉及数控参数曲线插补加工过程中一种随动误差补偿方法及一种基于高精度轮廓误差矢量估计的轮廓误差补偿方法。该方法首先基于拉普拉斯变换和逆变换计算使系统理论输出值等于期望输出值时的随动误差补偿值;其次,提出参考点再生的一阶近似算法,用于高精度估计轮廓误差矢量;最后,依据轮廓误差矢量估计值,在引入补偿增益的基础上,实现轮廓误差实时补偿;本发明可同时提高数控进给系统单轴跟踪精度和多轴联动轮廓精度,可实现单轴运动随动误差的有效抑制,保证了数控

轮廓校正方法和系统以及轮廓提取方法和系统.pdf
本发明公开了一种轮廓校正方法和系统,用于通过将每个像素标记为人或者背景从而校正从图像中提取出的人的轮廓。目标区域中的像素通过以下步骤被校正:通过利用人的直方图和背景直方图来计算第一连接成本的步骤;对于在目标区域中的每个像素,像素的第二连接成本被计算出来的步骤;以及校正步骤,其中顶点是目标区域中的像素且顶点之间的边缘是第一连接成本和第二连接成本的图被制作出,且最小割被计算出来,并基于所述最小割,在目标区域中的像素被重新标记以便校正轮廓。更进一步地,一种轮廓提取方法和系统被公开。