
基于线激光检测技术的车辆关键部件形位检测方法.pdf

宜欣****外呢


1/10

2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于线激光检测技术的车辆关键部件形位检测方法.pdf
基于线激光检测技术的车辆关键部件形位检测方法,涉及轨道交通领域,包括如下步骤:S1、选择一个需要检测的车辆关键部位A;S2、在A处选取至少一个参照物B,A相对B存在位置关系的变化;S3、向A和B发射同一道线激光;S4、线激光到达A和B表面的距离构成二维轮廓曲线;S5、获取A和B初始位置时的初始二维轮廓曲线及A和B实时位置的实时二维轮廓曲线;S6、在同一位置时,初始二维轮廓曲线上A相对于B的位置关系为D0,实时二维轮廓曲线A相对于B的位置关系为Di,Di与D0的差异即为A的位置变化量。本发明实现方式简单可操
基于轮廓扫描的车辆形位检测系统及方法.pdf
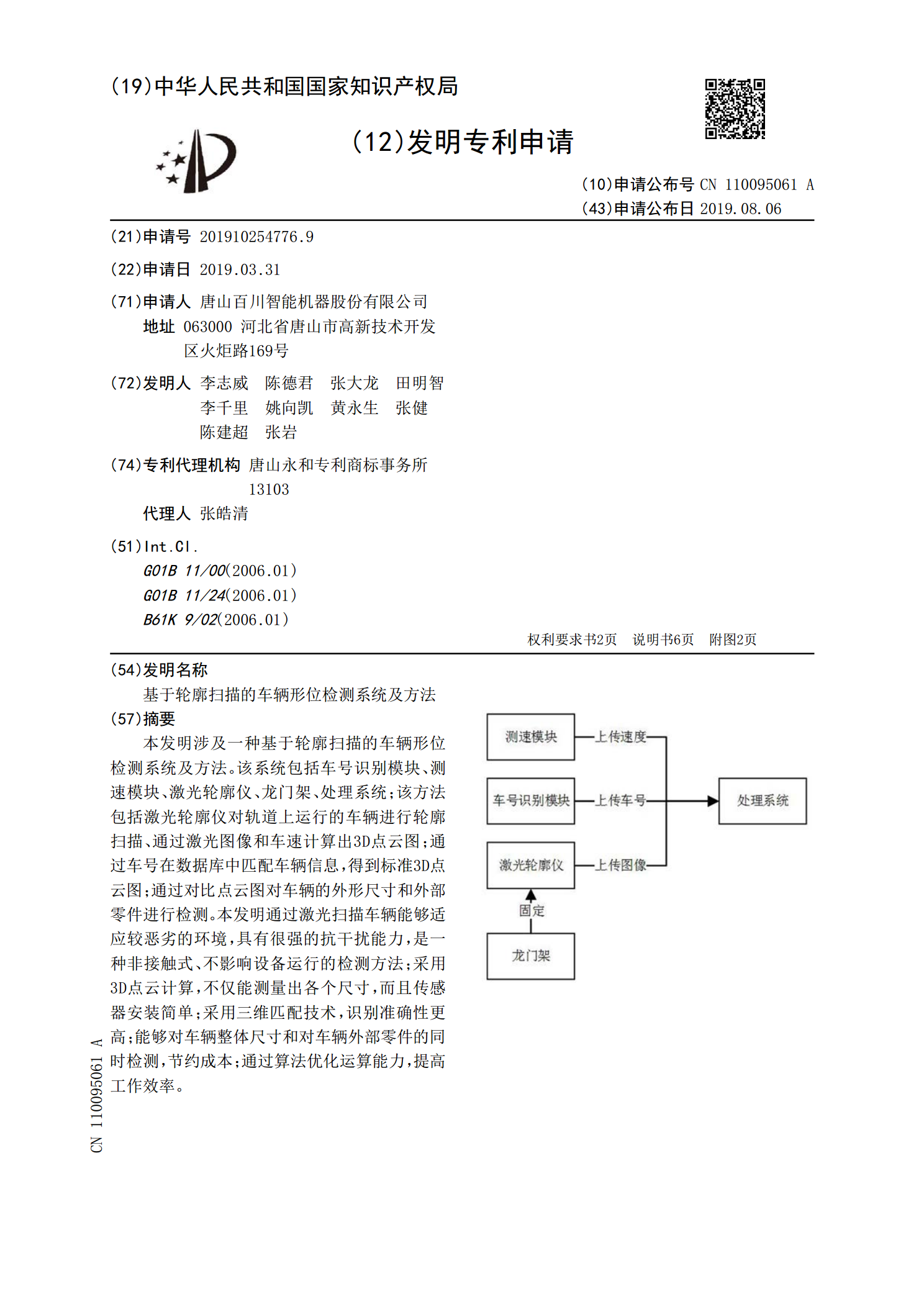
本发明涉及一种基于轮廓扫描的车辆形位检测系统及方法。该系统包括车号识别模块、测速模块、激光轮廓仪、龙门架、处理系统;该方法包括激光轮廓仪对轨道上运行的车辆进行轮廓扫描、通过激光图像和车速计算出3D点云图;通过车号在数据库中匹配车辆信息,得到标准3D点云图;通过对比点云图对车辆的外形尺寸和外部零件进行检测。本发明通过激光扫描车辆能够适应较恶劣的环境,具有很强的抗干扰能力,是一种非接触式、不影响设备运行的检测方法;采用3D点云计算,不仅能测量出各个尺寸,而且传感器安装简单;采用三维匹配技术,识别准确性更高;能

基于部件模型的复杂场景车辆检测方法.docx
基于部件模型的复杂场景车辆检测方法随着自动驾驶技术的发展,车辆检测已成为自动驾驶的基本技术之一。在复杂的城市场景中,车辆检测面临着诸多挑战,如光照变化、天气变化、光照反射等问题。因此,基于部件模型的复杂场景车辆检测方法被提出,有效地解决了上述问题。基于部件模型的复杂场景车辆检测方法主要分为以下几个步骤:特征提取、候选框生成、部件检测和车辆检测。首先是特征提取。传统的特征提取方式如HOG、SURF等,在复杂的场景下鲁棒性差,无法准确地检测车辆。因而,使用深度学习的方法提取特征,常见的处理方式是使用卷积神经网
基于相移技术的车辆轮胎激光快速无损检测方法.pdf
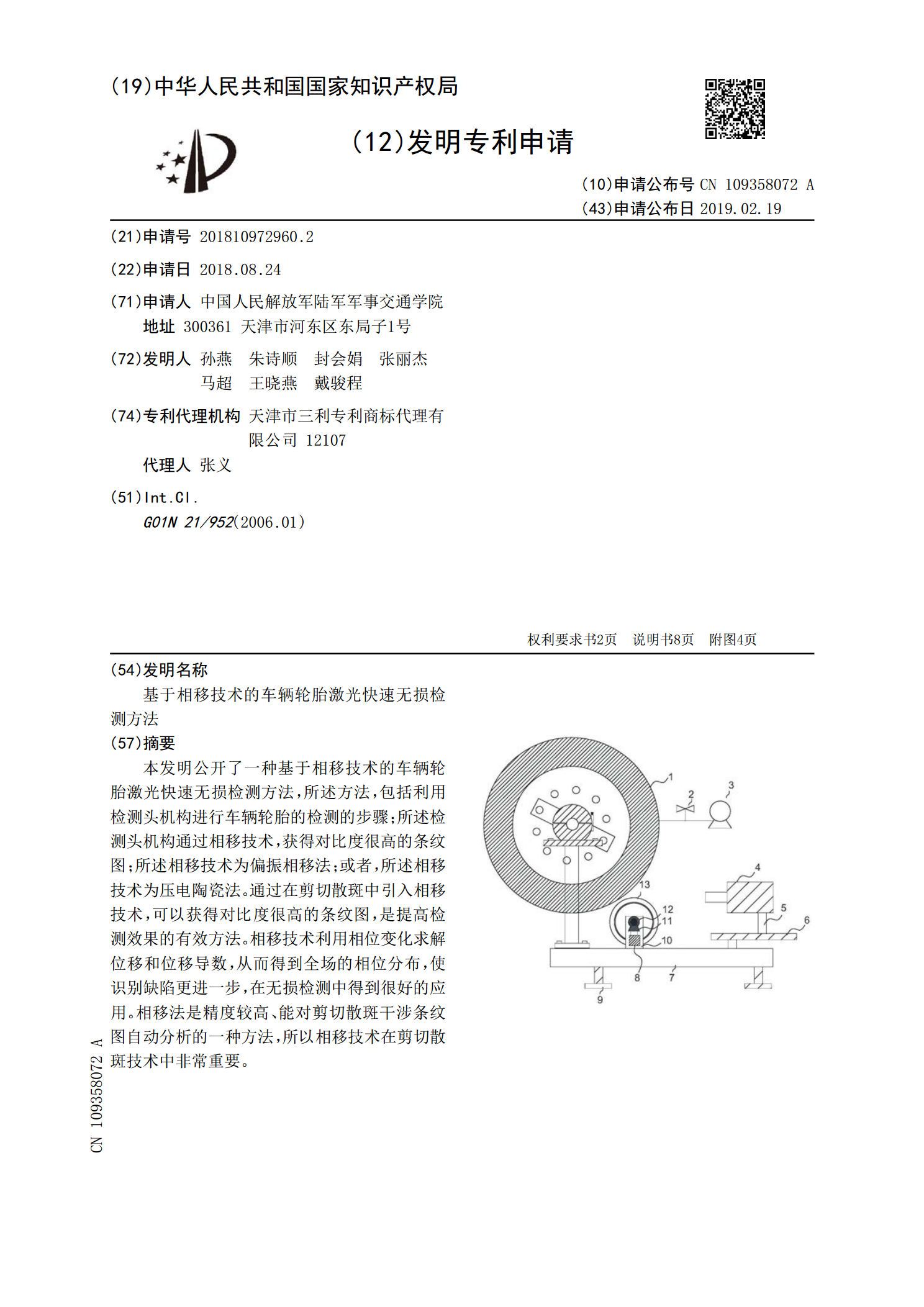
本发明公开了一种基于相移技术的车辆轮胎激光快速无损检测方法,所述方法,包括利用检测头机构进行车辆轮胎的检测的步骤;所述检测头机构通过相移技术,获得对比度很高的条纹图;所述相移技术为偏振相移法;或者,所述相移技术为压电陶瓷法。通过在剪切散斑中引入相移技术,可以获得对比度很高的条纹图,是提高检测效果的有效方法。相移技术利用相位变化求解位移和位移导数,从而得到全场的相位分布,使识别缺陷更进一步,在无损检测中得到很好的应用。相移法是精度较高、能对剪切散斑干涉条纹图自动分析的一种方法,所以相移技术在剪切散斑技术中非

基于线激光的车辙检测系统设计.docx
基于线激光的车辙检测系统设计摘要随着交通工具的普及,道路的质量和安全性变得越来越重要。在车辙形成的情况下,路面可能会变得危险,这会影响驾驶员的安全。因此,开发一种车辙检测系统来检测道路的状况是非常必要的。本文提出了一种基于线激光的车辙检测系统设计方案。本文首先介绍了车辙检测技术的相关背景和研究现状,然后详细介绍了基于线激光的车辙检测系统的设计原理和技术路线。该系统可以实时监测路面的车辙情况,提高道路的安全性和可靠性。关键词:车辙检测、线激光、系统设计引言道路的质量和安全性对国家和人民的生产和生活有着重要的