
AGV底盘机构和AGV车.pdf

爱欢****23


1/9
2/9
3/9
4/9

5/9

6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
AGV底盘机构和AGV车.pdf
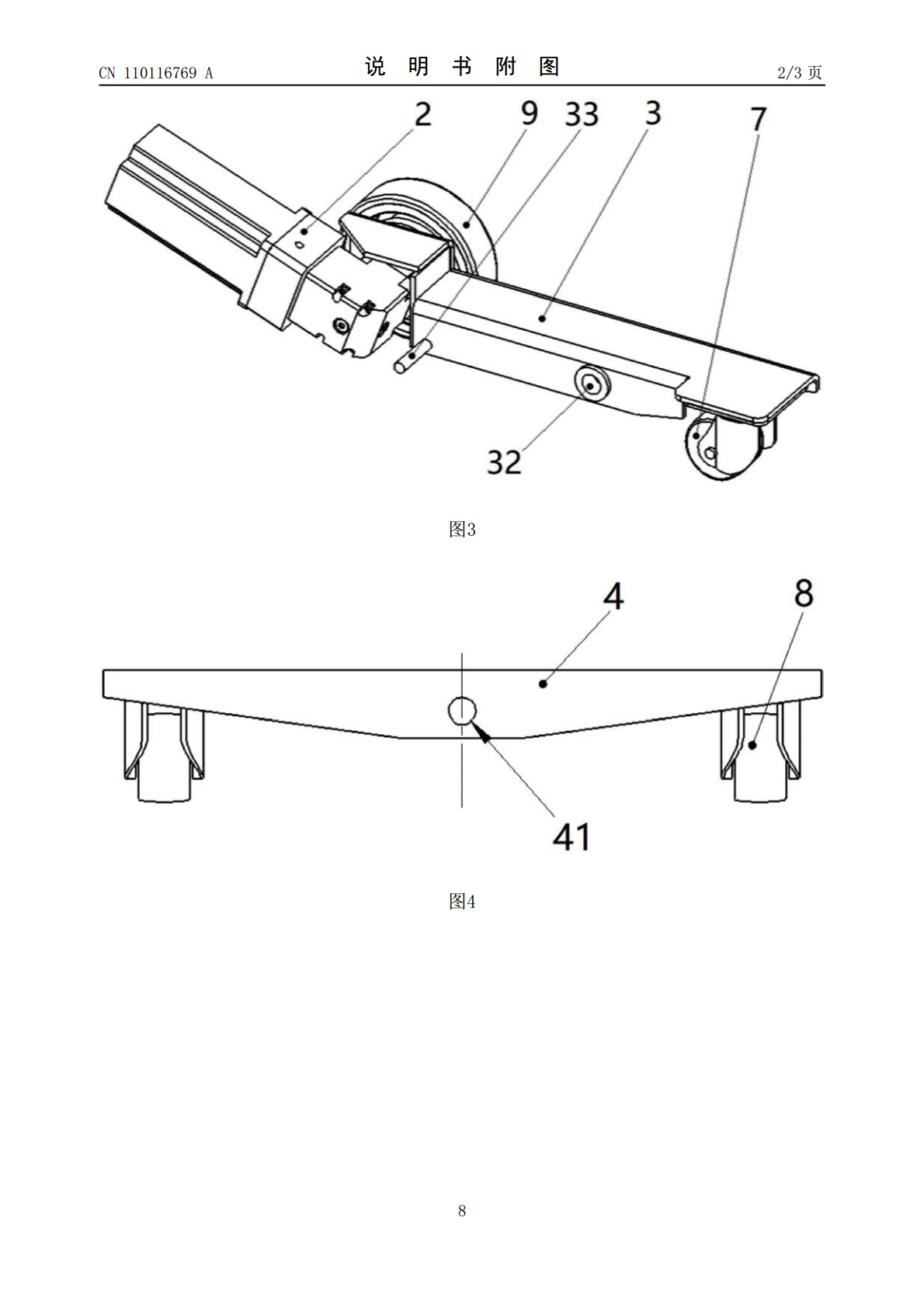
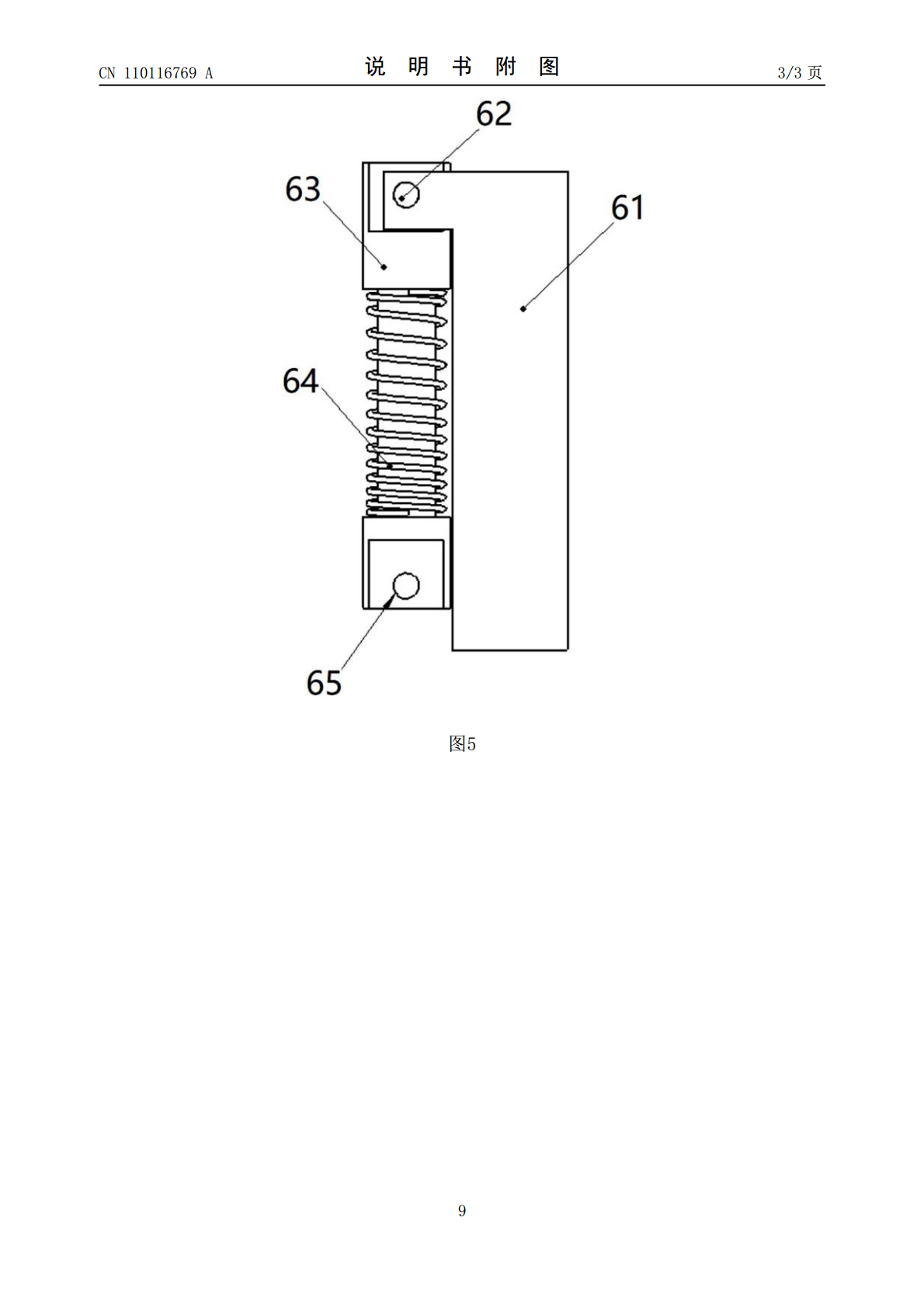
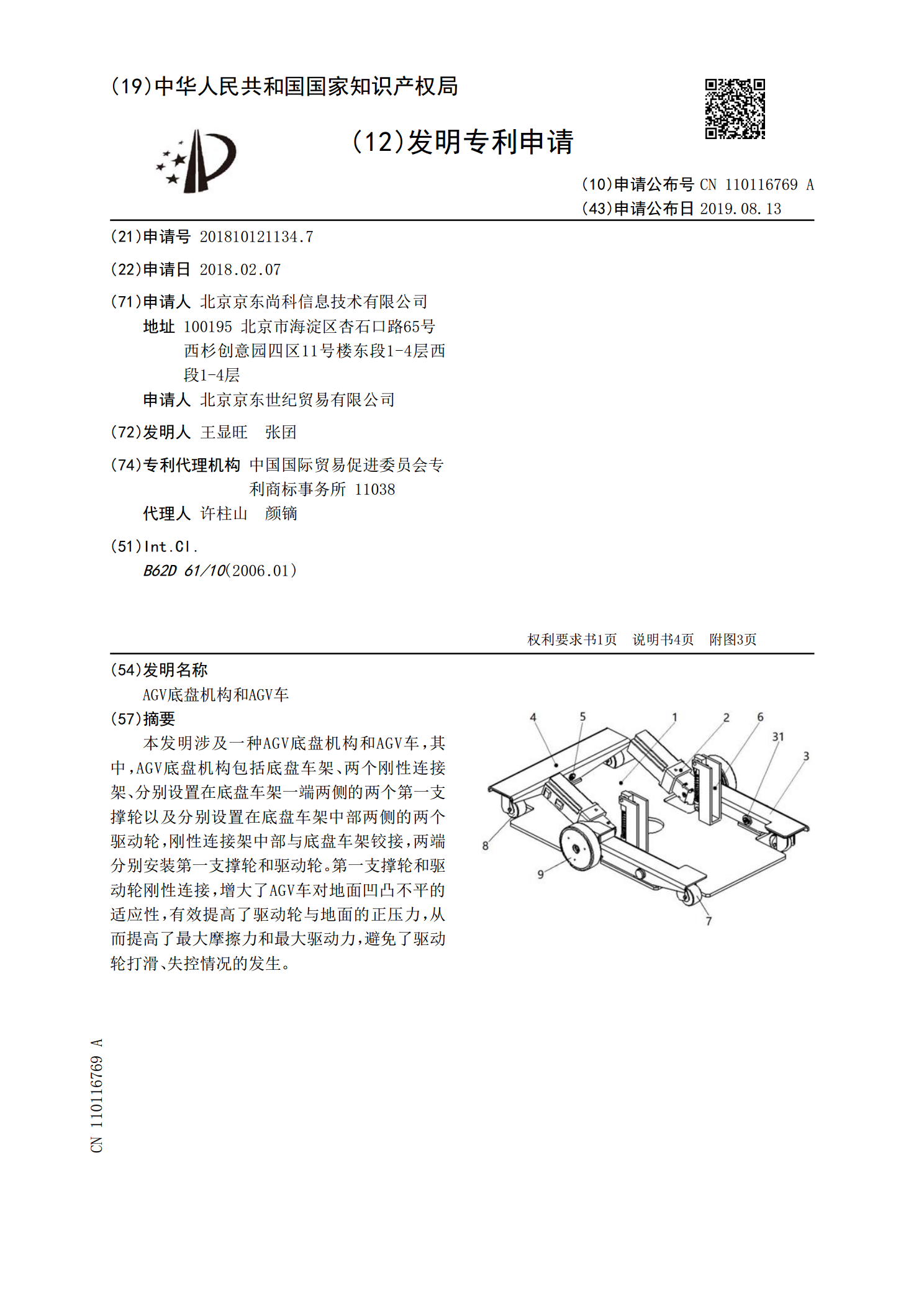
本发明涉及一种AGV底盘机构和AGV车,其中,AGV底盘机构包括底盘车架、两个刚性连接架、分别设置在底盘车架一端两侧的两个第一支撑轮以及分别设置在底盘车架中部两侧的两个驱动轮,刚性连接架中部与底盘车架铰接,两端分别安装第一支撑轮和驱动轮。第一支撑轮和驱动轮刚性连接,增大了AGV车对地面凹凸不平的适应性,有效提高了驱动轮与地面的正压力,从而提高了最大摩擦力和最大驱动力,避免了驱动轮打滑、失控情况的发生。

AGV底盘行驶机构.pdf
本发明公开了一种AGV底盘行驶机构,包括AGV直线转向装置和AGV自动升降减振装置,AGV直线转向装置包括位于中部的轴承座,在轴承座的左右两侧对称设置的驱动轮、从动轴、轴承、滚子链传动装置,以及在轴承座前后两侧对称设置的电机、减速器、电机座和制动器;AGV自动升降减振装置包括嵌于轴承座内的直线电机座、直线电机、弹簧、弹簧座支架、滑座、直线轴承、直线电机上轴套、直线电机下轴套、直线电机下定位套和驱动装置机座。本发明AGV底盘行驶机构集成了直线行走、转弯、自动升降、减振、紧急刹车的功能,由于所有轮子均有减振功

AGV运输车的举升机构和AGV运输车.pdf
本发明公开了一种AGV运输车的举升机构和AGV运输车。AGV运输车的举升机构包括托盘,用于承载物品;转桶,可转动地设置且其外周面上设置有螺旋导槽;旋升滚轮,设置于托盘上且沿螺旋导槽运动;托盘在旋升滚轮的带动下沿竖直方向进行升降。本发明的AGV运输车的举升机构利用旋升滚轮与转桶上设置的螺旋导槽之间的配合来实现托盘在竖直方向上的升降运动,在运动过程中,螺旋导槽的上下侧壁对旋升滚轮的运动起到限位的作用,因此托盘的升降运动更平稳。而且本发明的举升机构的螺旋导槽设置于转桶的外周面上,因此其运动工作过程更易监控,从而
AGV底盘及AGV小车.pdf
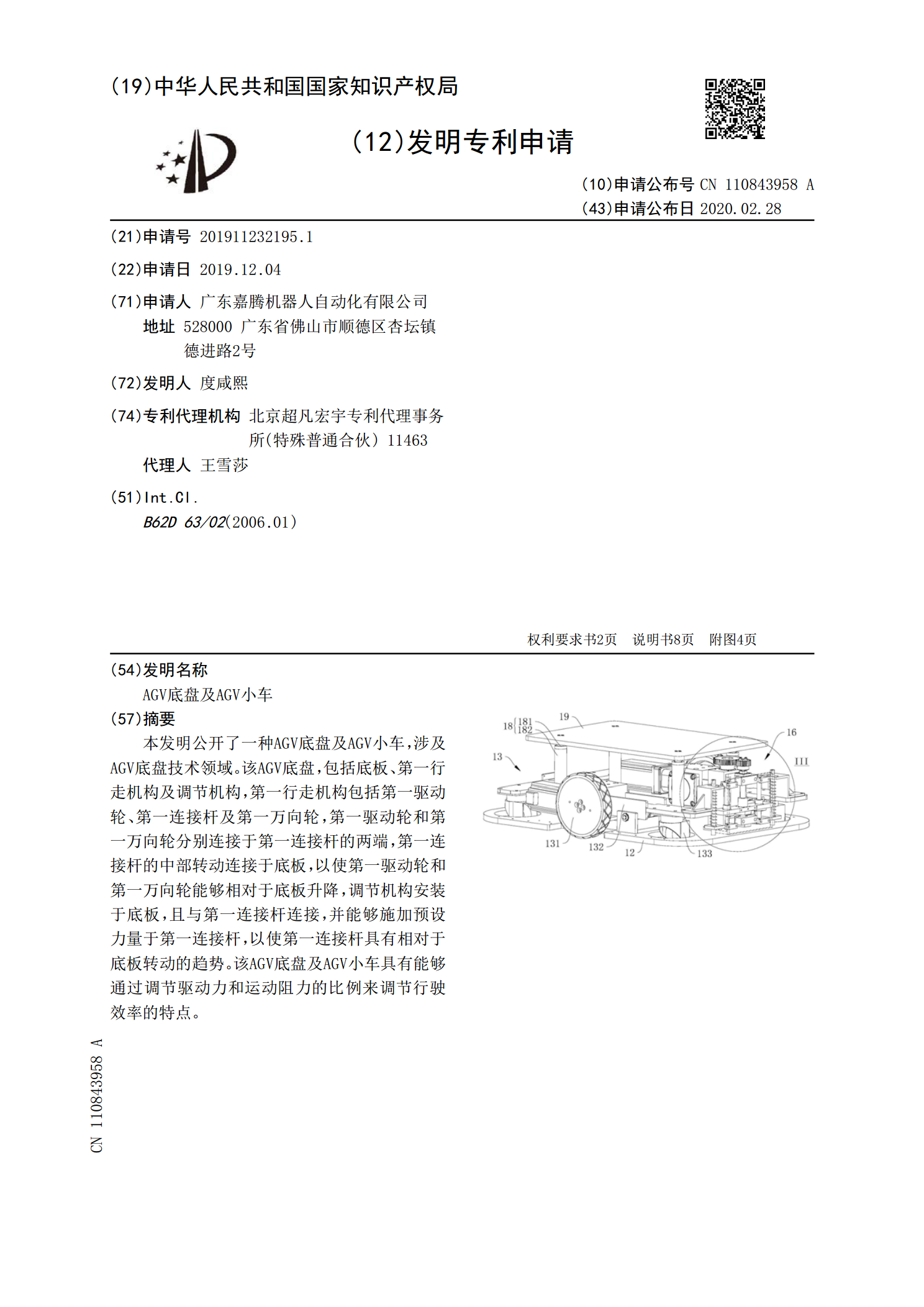
本发明公开了一种AGV底盘及AGV小车,涉及AGV底盘技术领域。该AGV底盘,包括底板、第一行走机构及调节机构,第一行走机构包括第一驱动轮、第一连接杆及第一万向轮,第一驱动轮和第一万向轮分别连接于第一连接杆的两端,第一连接杆的中部转动连接于底板,以使第一驱动轮和第一万向轮能够相对于底板升降,调节机构安装于底板,且与第一连接杆连接,并能够施加预设力量于第一连接杆,以使第一连接杆具有相对于底板转动的趋势。该AGV底盘及AGV小车具有能够通过调节驱动力和运动阻力的比例来调节行驶效率的特点。
一种AGV用翻转机构、底盘、AGV.pdf
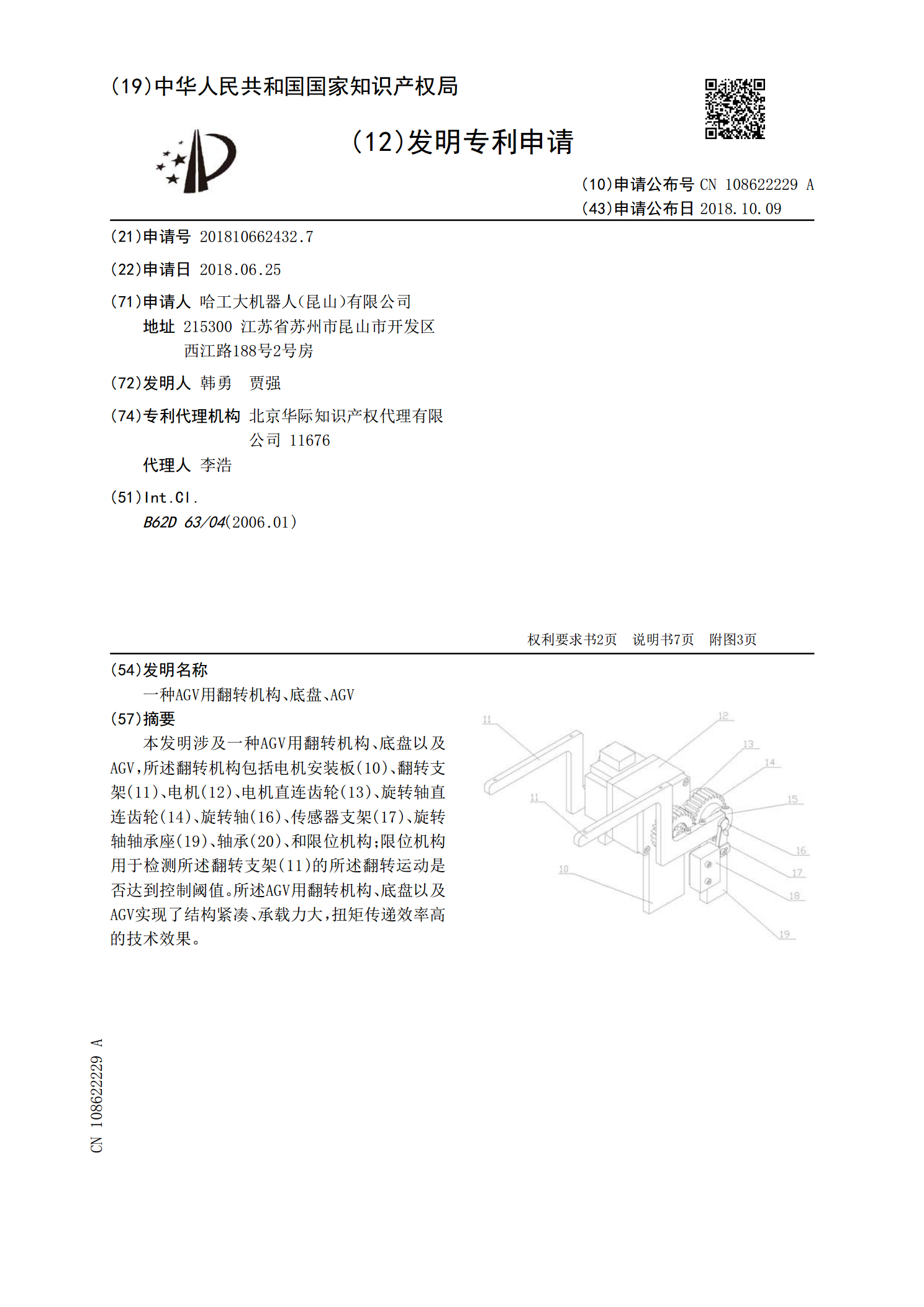
本发明涉及一种AGV用翻转机构、底盘以及AGV,所述翻转机构包括电机安装板(10)、翻转支架(11)、电机(12)、电机直连齿轮(13)、旋转轴直连齿轮(14)、旋转轴(16)、传感器支架(17)、旋转轴轴承座(19)、轴承(20)、和限位机构;限位机构用于检测所述翻转支架(11)的所述翻转运动是否达到控制阈值。所述AGV用翻转机构、底盘以及AGV实现了结构紧凑、承载力大,扭矩传递效率高的技术效果。