
一种AGV用翻转机构、底盘、AGV.pdf

春波****公主

1/10

2/10
3/10
4/10
5/10

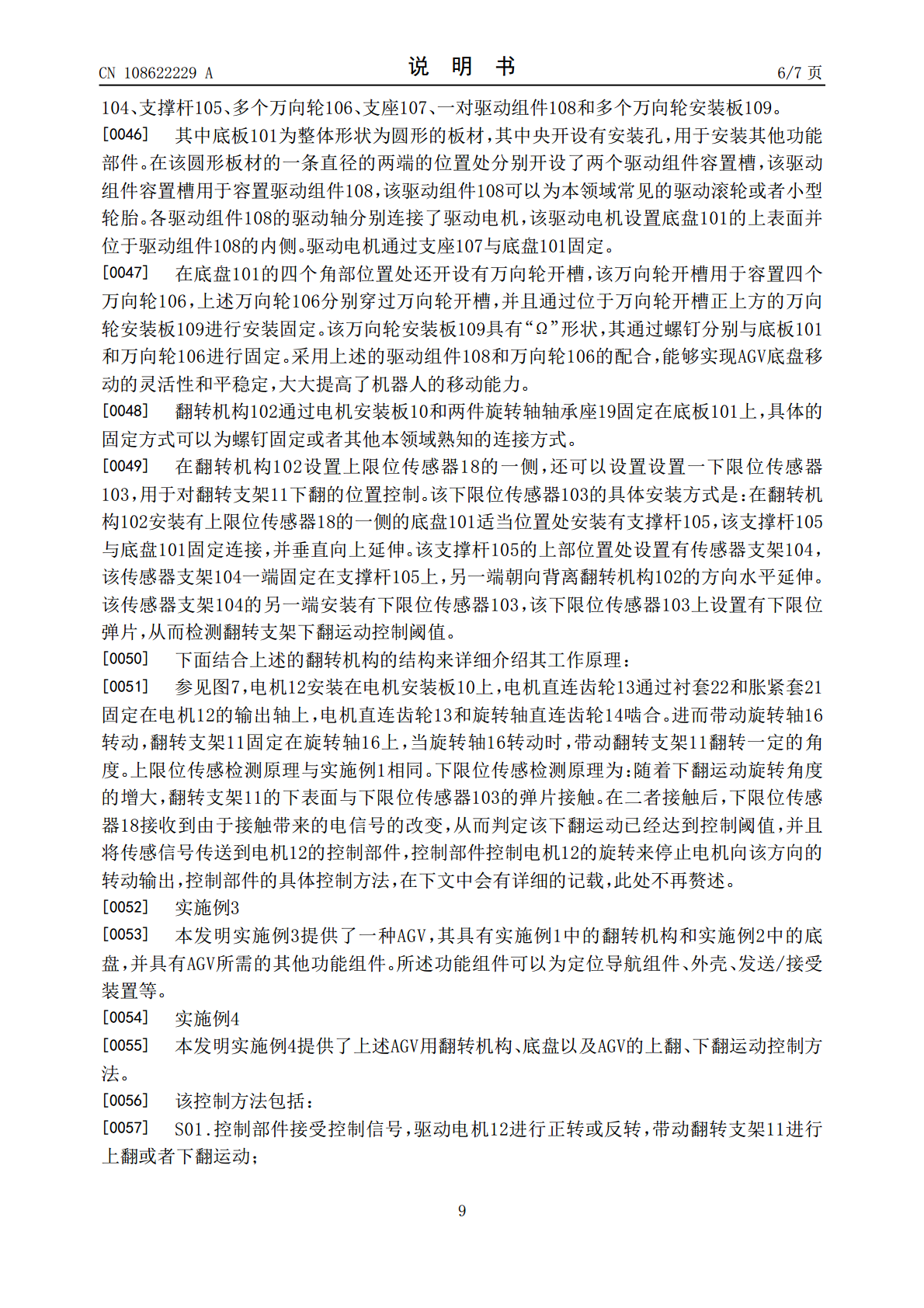
6/10

7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种AGV用翻转机构、底盘、AGV.pdf
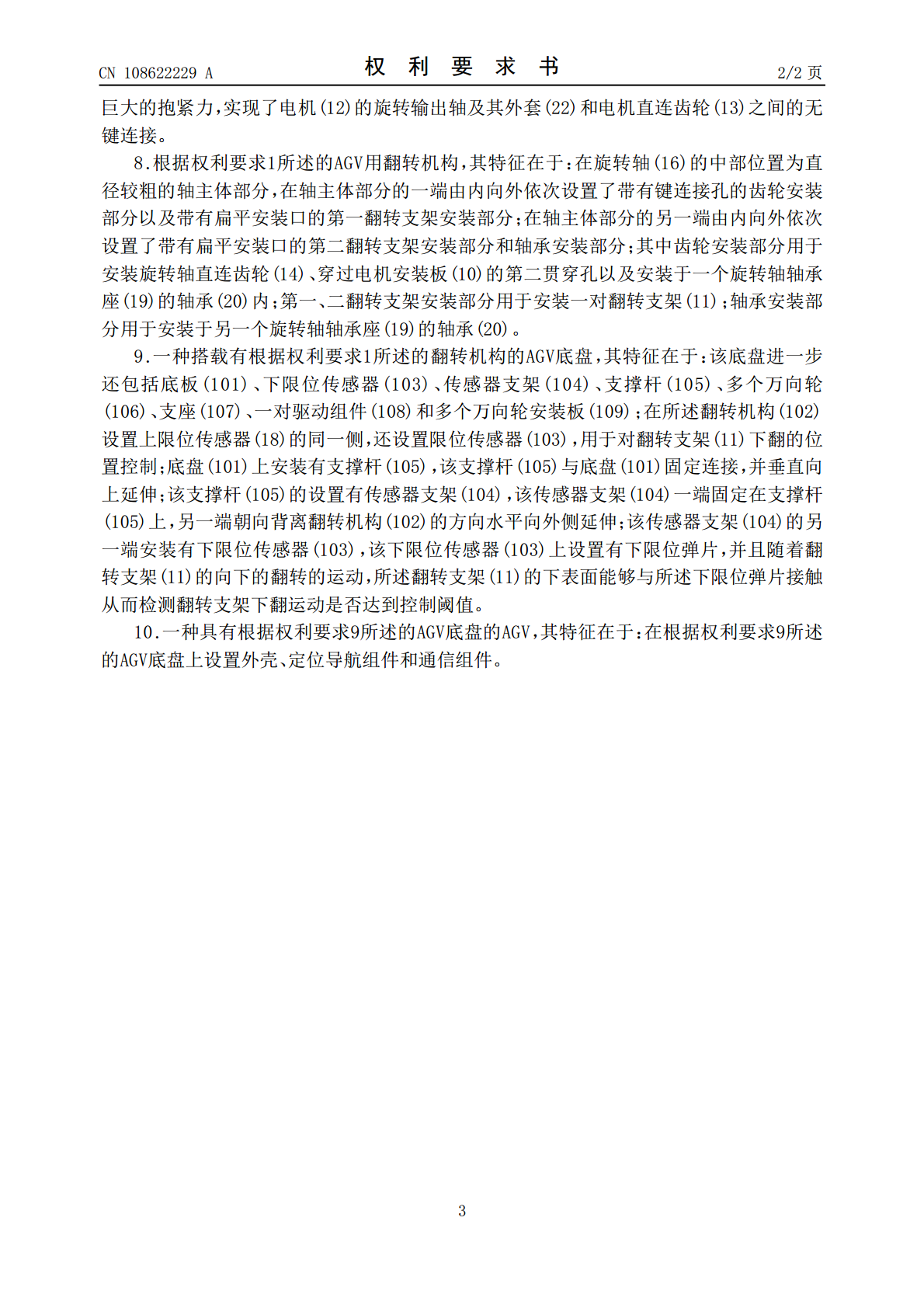
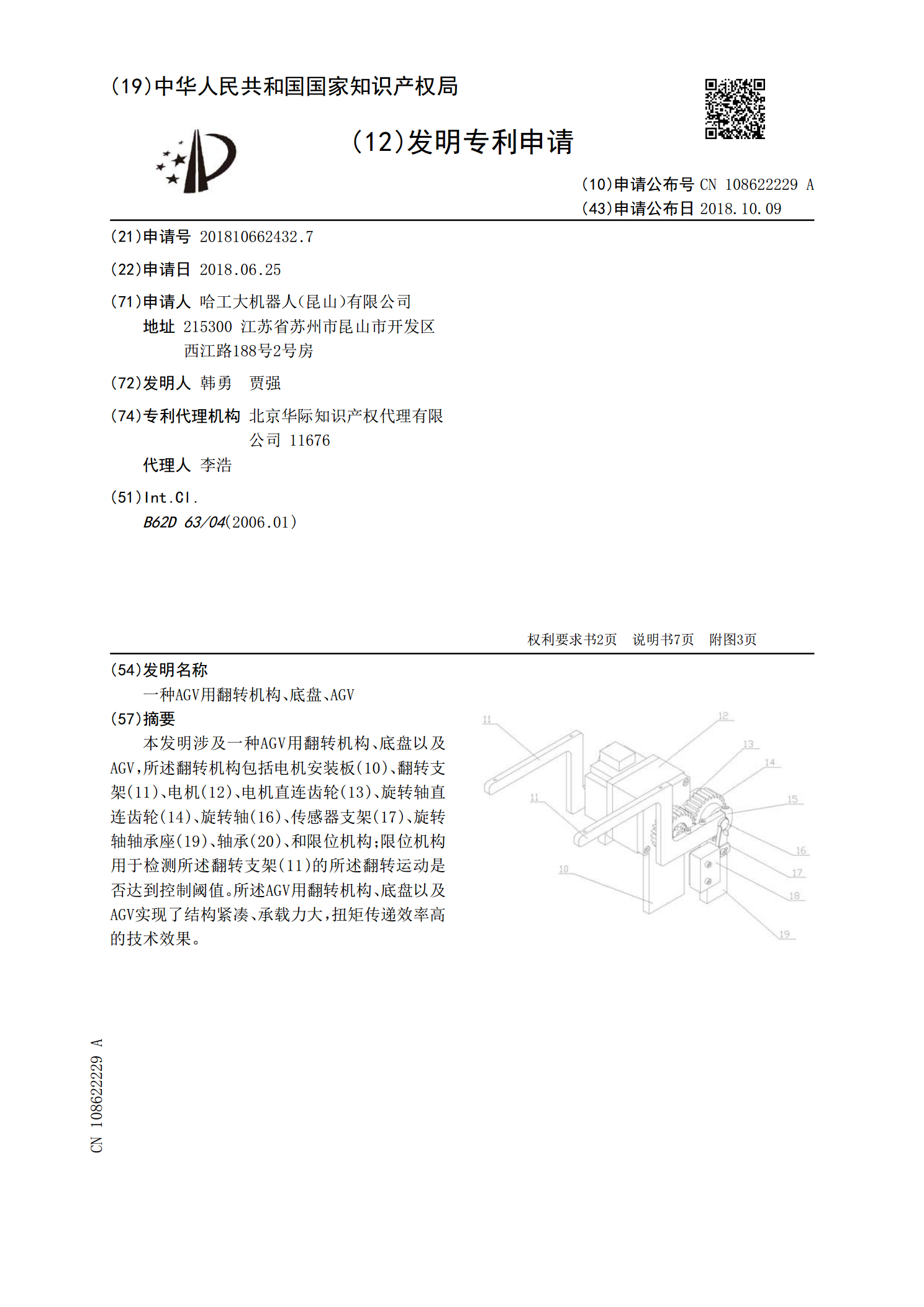
本发明涉及一种AGV用翻转机构、底盘以及AGV,所述翻转机构包括电机安装板(10)、翻转支架(11)、电机(12)、电机直连齿轮(13)、旋转轴直连齿轮(14)、旋转轴(16)、传感器支架(17)、旋转轴轴承座(19)、轴承(20)、和限位机构;限位机构用于检测所述翻转支架(11)的所述翻转运动是否达到控制阈值。所述AGV用翻转机构、底盘以及AGV实现了结构紧凑、承载力大,扭矩传递效率高的技术效果。
AGV底盘机构和AGV车.pdf
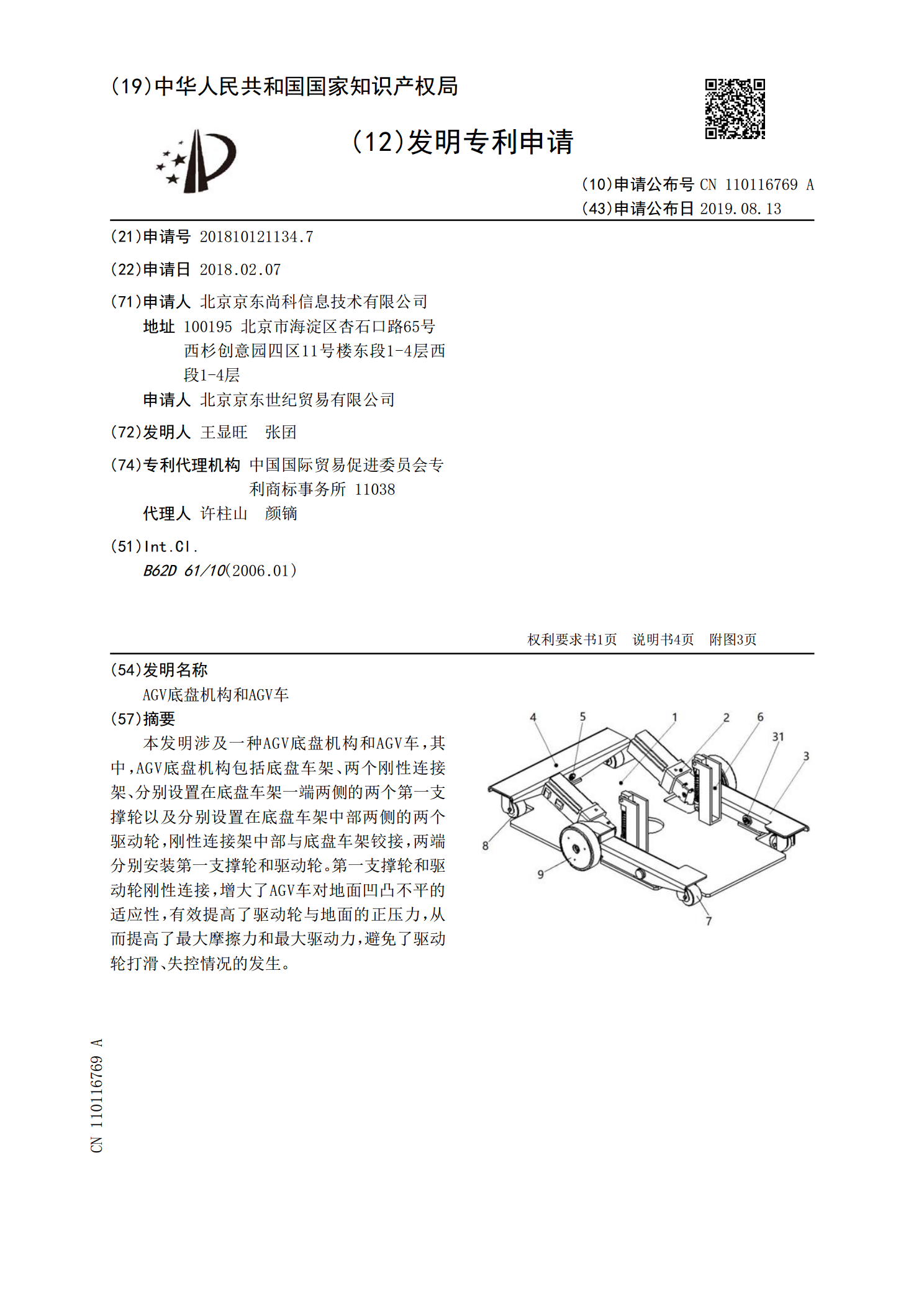
本发明涉及一种AGV底盘机构和AGV车,其中,AGV底盘机构包括底盘车架、两个刚性连接架、分别设置在底盘车架一端两侧的两个第一支撑轮以及分别设置在底盘车架中部两侧的两个驱动轮,刚性连接架中部与底盘车架铰接,两端分别安装第一支撑轮和驱动轮。第一支撑轮和驱动轮刚性连接,增大了AGV车对地面凹凸不平的适应性,有效提高了驱动轮与地面的正压力,从而提高了最大摩擦力和最大驱动力,避免了驱动轮打滑、失控情况的发生。

AGV底盘行驶机构.pdf
本发明公开了一种AGV底盘行驶机构,包括AGV直线转向装置和AGV自动升降减振装置,AGV直线转向装置包括位于中部的轴承座,在轴承座的左右两侧对称设置的驱动轮、从动轴、轴承、滚子链传动装置,以及在轴承座前后两侧对称设置的电机、减速器、电机座和制动器;AGV自动升降减振装置包括嵌于轴承座内的直线电机座、直线电机、弹簧、弹簧座支架、滑座、直线轴承、直线电机上轴套、直线电机下轴套、直线电机下定位套和驱动装置机座。本发明AGV底盘行驶机构集成了直线行走、转弯、自动升降、减振、紧急刹车的功能,由于所有轮子均有减振功
一种AGV底盘及AGV小车.pdf
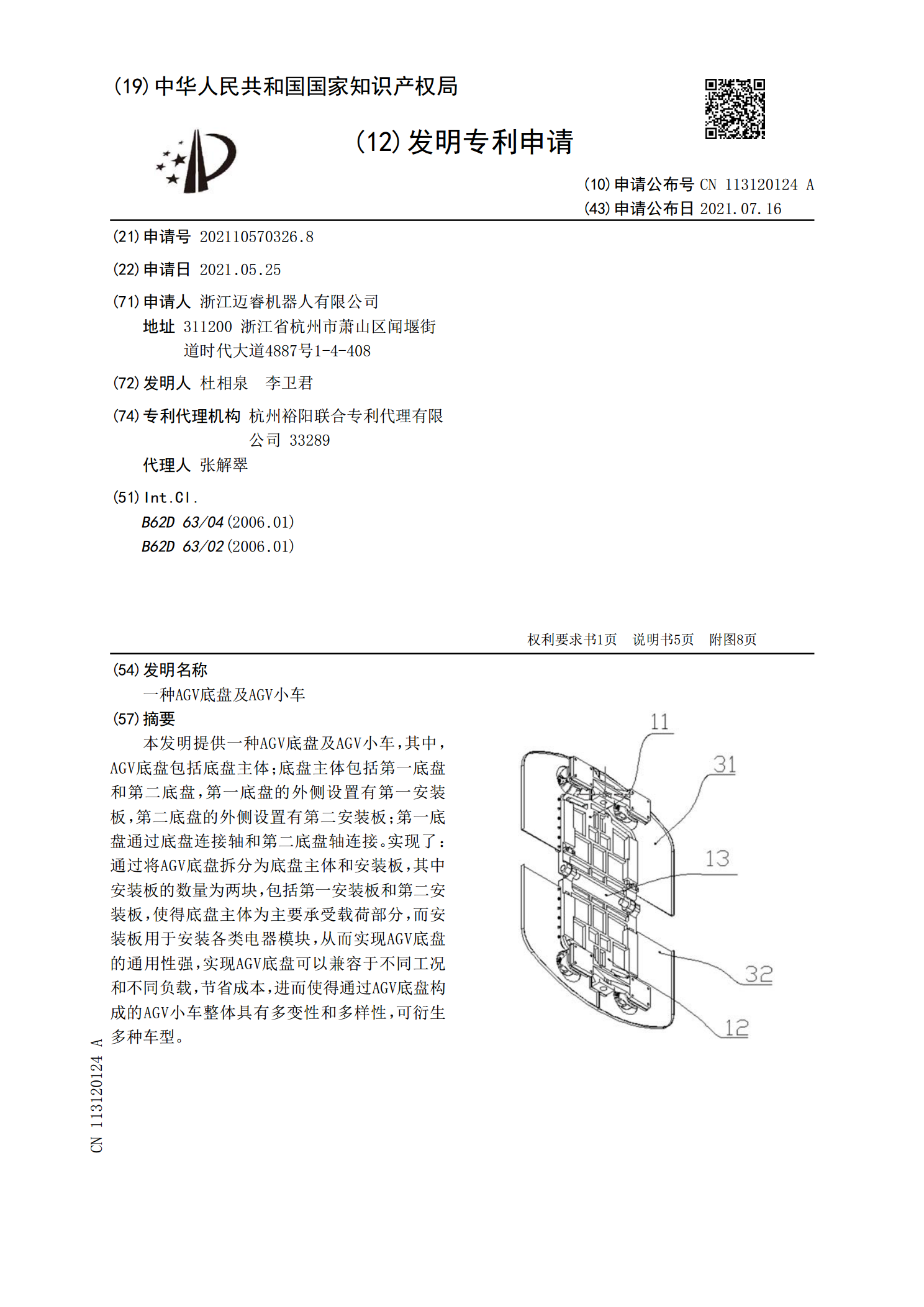
本发明提供一种AGV底盘及AGV小车,其中,AGV底盘包括底盘主体;底盘主体包括第一底盘和第二底盘,第一底盘的外侧设置有第一安装板,第二底盘的外侧设置有第二安装板;第一底盘通过底盘连接轴和第二底盘轴连接。实现了:通过将AGV底盘拆分为底盘主体和安装板,其中安装板的数量为两块,包括第一安装板和第二安装板,使得底盘主体为主要承受载荷部分,而安装板用于安装各类电器模块,从而实现AGV底盘的通用性强,实现AGV底盘可以兼容于不同工况和不同负载,节省成本,进而使得通过AGV底盘构成的AGV小车整体具有多变性和多样性

一种带有悬挂机构的AGV车用底盘.pdf
本发明公开了一种带有悬挂机构的AGV车用底盘,它包括电机安装支架I(1)、电机安装支架II(2)、驱动电机I(3)、驱动电机II(4)以及AGV车用底板(5),底板(5)中部的顶表面设置有安装块(6),电机安装支架I(1)和电机安装支架II(2)均设置在底板(5)的中部,压板(13)固定在两根弹簧(14)之间,两根弹簧(14)均固定在底板(5)上,悬挂机构A(11)的压板(13)抵压在电机安装支架I(1)的横板(8)的顶部,悬挂机构B(12)的压板(13)抵压在电机安装支架II(2)的横板(8)的顶部。本