
控制回正机务工作平台的自动回正转向系统.pdf

星星****眨眼

1/9
2/9
3/9

4/9
5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

控制回正机务工作平台的自动回正转向系统.pdf
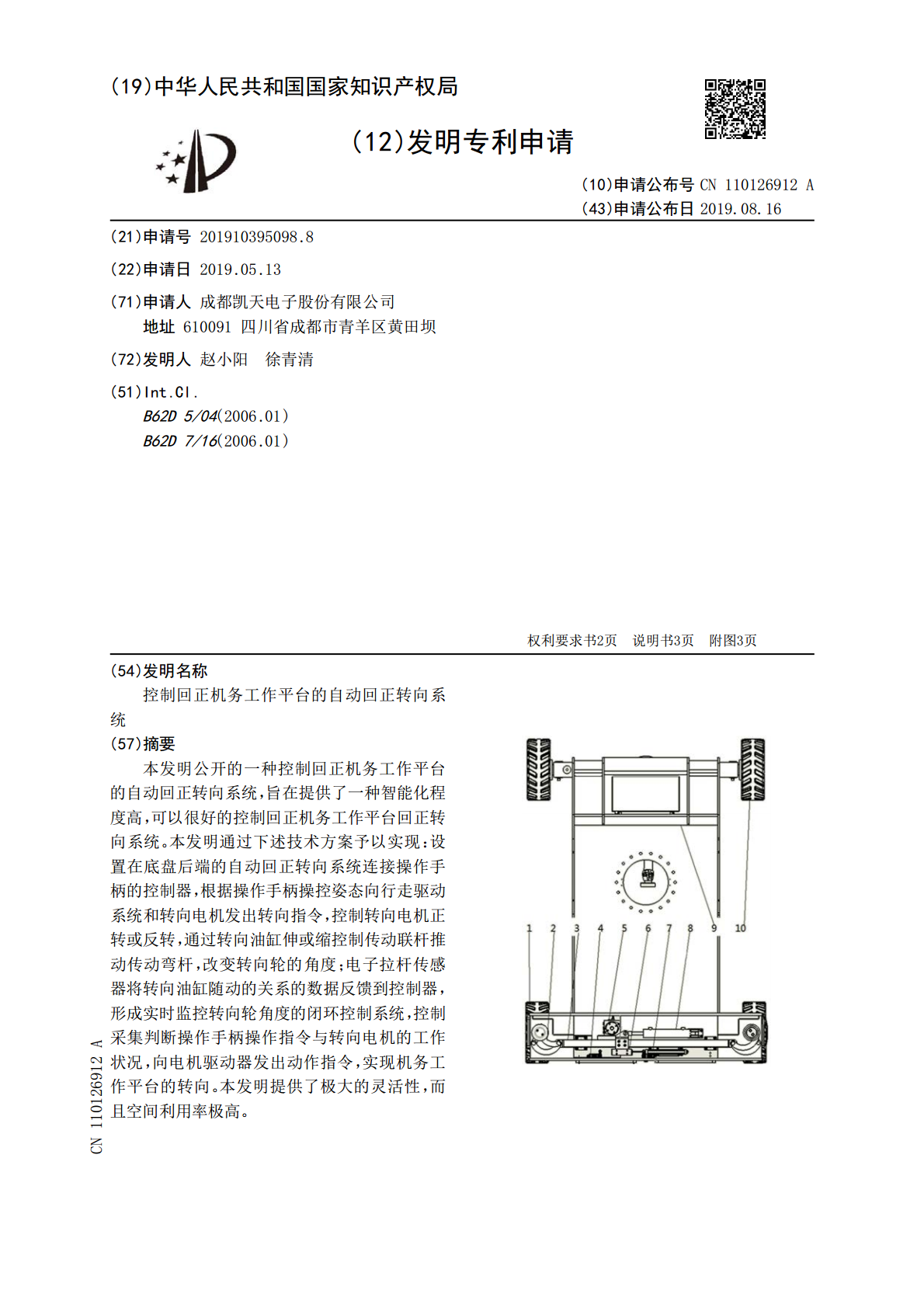
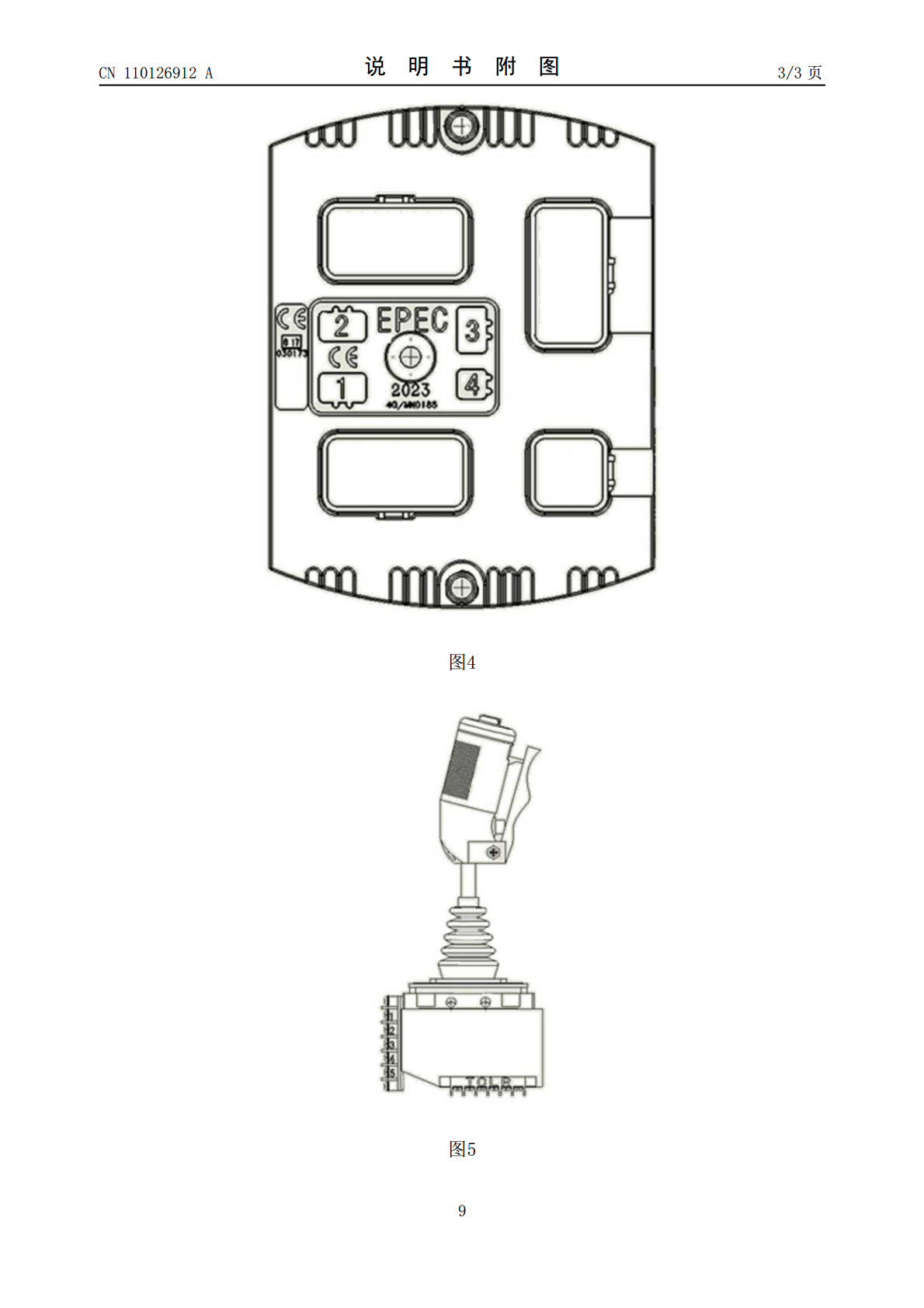
本发明公开的一种控制回正机务工作平台的自动回正转向系统,旨在提供了一种智能化程度高,可以很好的控制回正机务工作平台回正转向系统。本发明通过下述技术方案予以实现:设置在底盘后端的自动回正转向系统连接操作手柄的控制器,根据操作手柄操控姿态向行走驱动系统和转向电机发出转向指令,控制转向电机正转或反转,通过转向油缸伸或缩控制传动联杆推动传动弯杆,改变转向轮的角度;电子拉杆传感器将转向油缸随动的关系的数据反馈到控制器,形成实时监控转向轮角度的闭环控制系统,控制采集判断操作手柄操作指令与转向电机的工作状况,向电机驱动
车轮自动回正系统.pdf
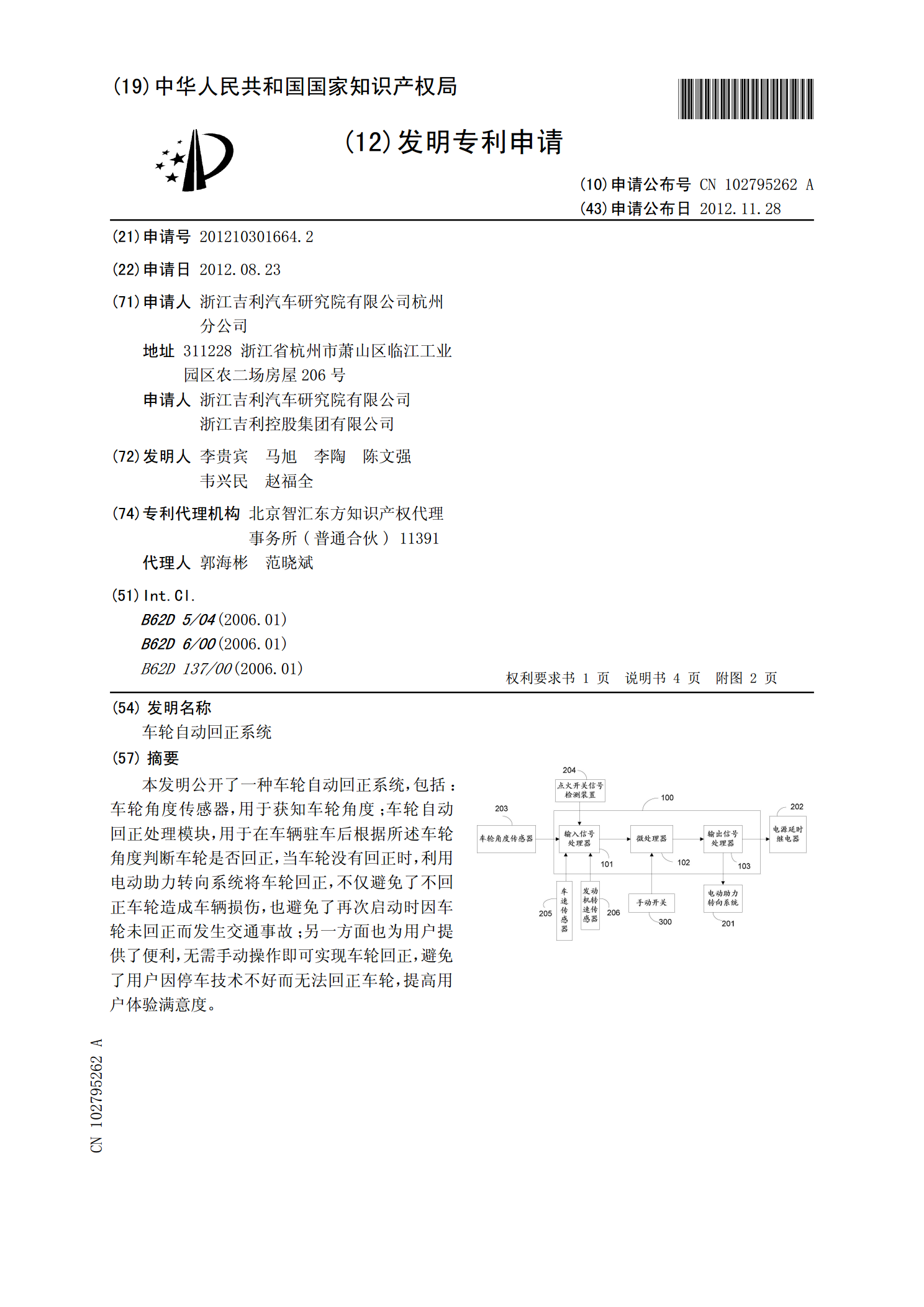
本发明公开了一种车轮自动回正系统,包括:车轮角度传感器,用于获知车轮角度;车轮自动回正处理模块,用于在车辆驻车后根据所述车轮角度判断车轮是否回正,当车轮没有回正时,利用电动助力转向系统将车轮回正,不仅避免了不回正车轮造成车辆损伤,也避免了再次启动时因车轮未回正而发生交通事故;另一方面也为用户提供了便利,无需手动操作即可实现车轮回正,避免了用户因停车技术不好而无法回正车轮,提高用户体验满意度。

电动助力转向系统论文:电动助力转向系统回正控制研究.doc
电动助力转向系统论文:电动助力转向系统回正控制研究【中文摘要】电动助力转向系统(ElectricPowerSteeringSystem,EPS)与传统的液压助力转向系统相比具有转向跟随性好、操纵方便、灵活、回正性好、结构紧凑,便于安装和模块化、低温工作性能好、节能环保等一系列优点。控制策略是影响电动助力转向系统性能的关键因素,也是电动助力转向系统的核心技术之一。设计具有回正控制功能的EPS控制器硬件,制订回正控制策略,实现不同工况下的准确回正,对防止汽车在运行过程中出现回正不足和回正超调现象,实现全速范围

一种机械自动回正转向柱.pdf
本发明公开一种机械自动回正转向柱,包括上管柱体、下管柱体、转轴、上安装支架和下安装支架,转轴的上部转动连接在上管柱体内,转轴的下部转动连接在下管柱体内,上安装支架固定连接在上管柱体外,下安装支架固定连接在下管柱体外,转轴的下端伸出下管柱体后固定设有齿轮,下安装支架的下端滑动连接有齿条,齿条与齿轮啮合,齿条的两端与下安装支架之间均设有弹性件,每个弹性件的两端分别抵接在齿轮的端面和下安装支架上,并随齿条的滑动收缩或者伸长。本发明能靠弹簧推力实现转向管柱自动回正、结构简单、成本低。
车辆及其的转向回正控制装置、方法.pdf
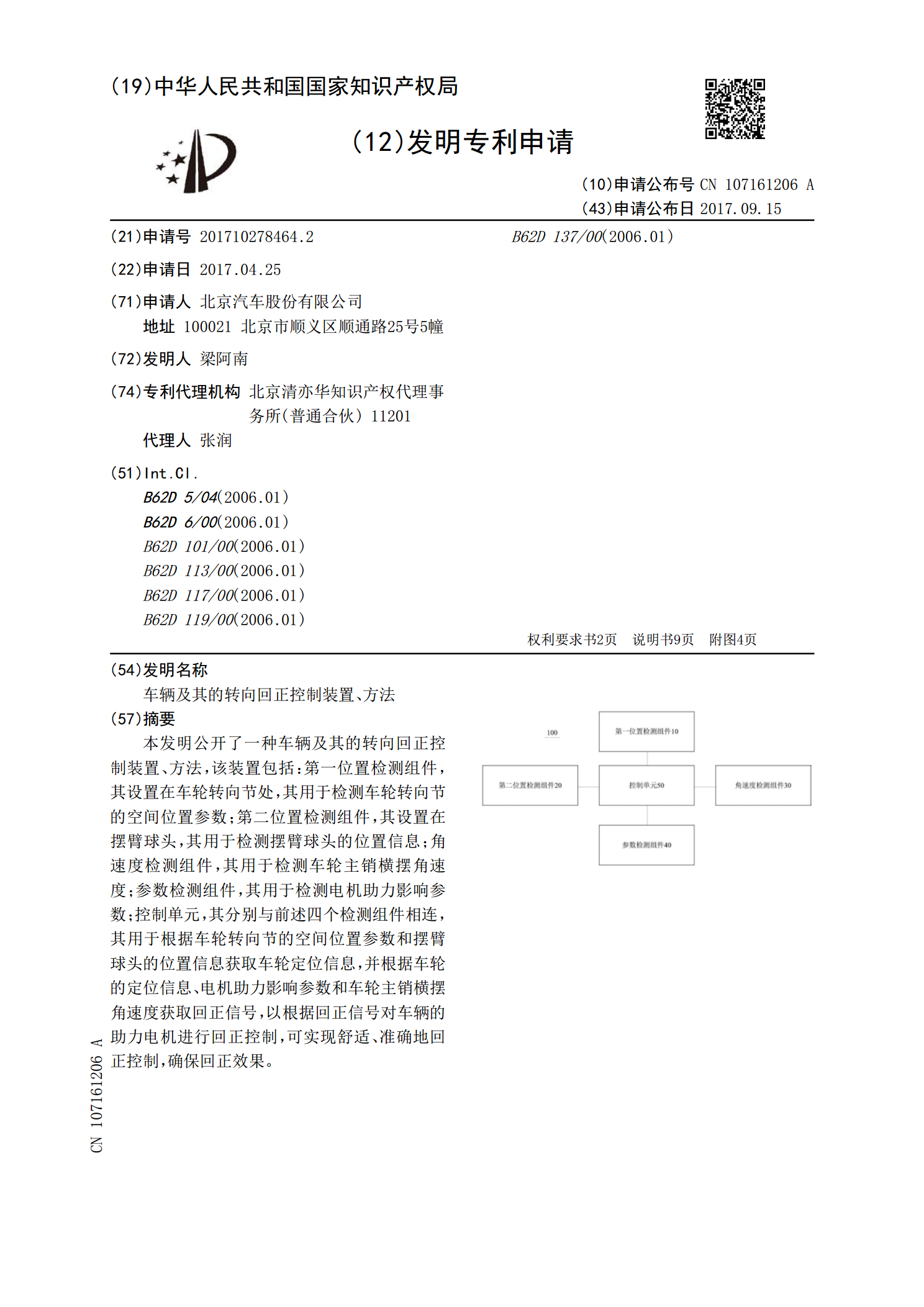
本发明公开了一种车辆及其的转向回正控制装置、方法,该装置包括:第一位置检测组件,其设置在车轮转向节处,其用于检测车轮转向节的空间位置参数;第二位置检测组件,其设置在摆臂球头,其用于检测摆臂球头的位置信息;角速度检测组件,其用于检测车轮主销横摆角速度;参数检测组件,其用于检测电机助力影响参数;控制单元,其分别与前述四个检测组件相连,其用于根据车轮转向节的空间位置参数和摆臂球头的位置信息获取车轮定位信息,并根据车轮的定位信息、电机助力影响参数和车轮主销横摆角速度获取回正信号,以根据回正信号对车辆的助力电机进行