
一种激光扫描振镜电机转矩常数测定方法.pdf

努力****梓颖

1/7

2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种激光扫描振镜电机转矩常数测定方法.pdf
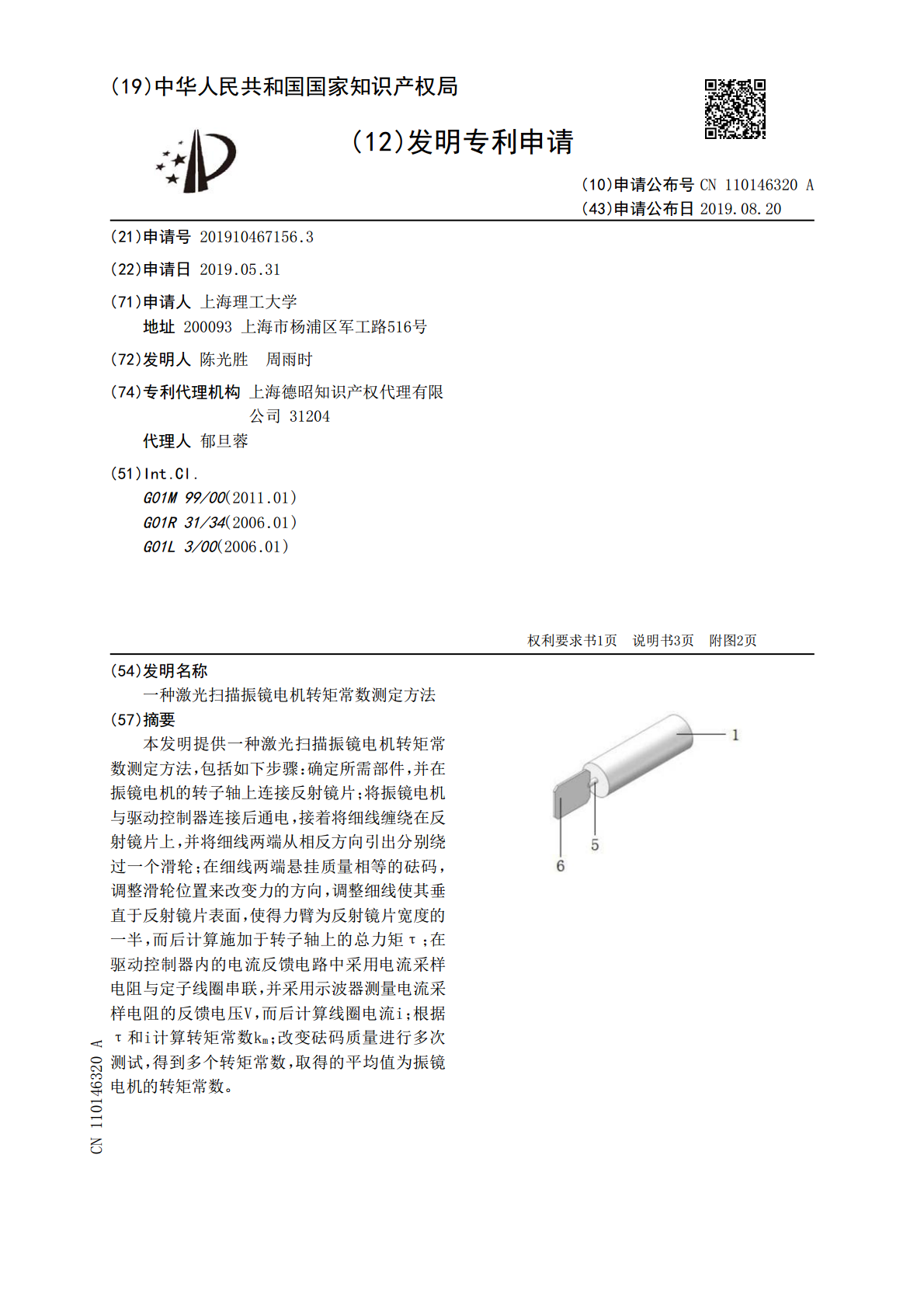
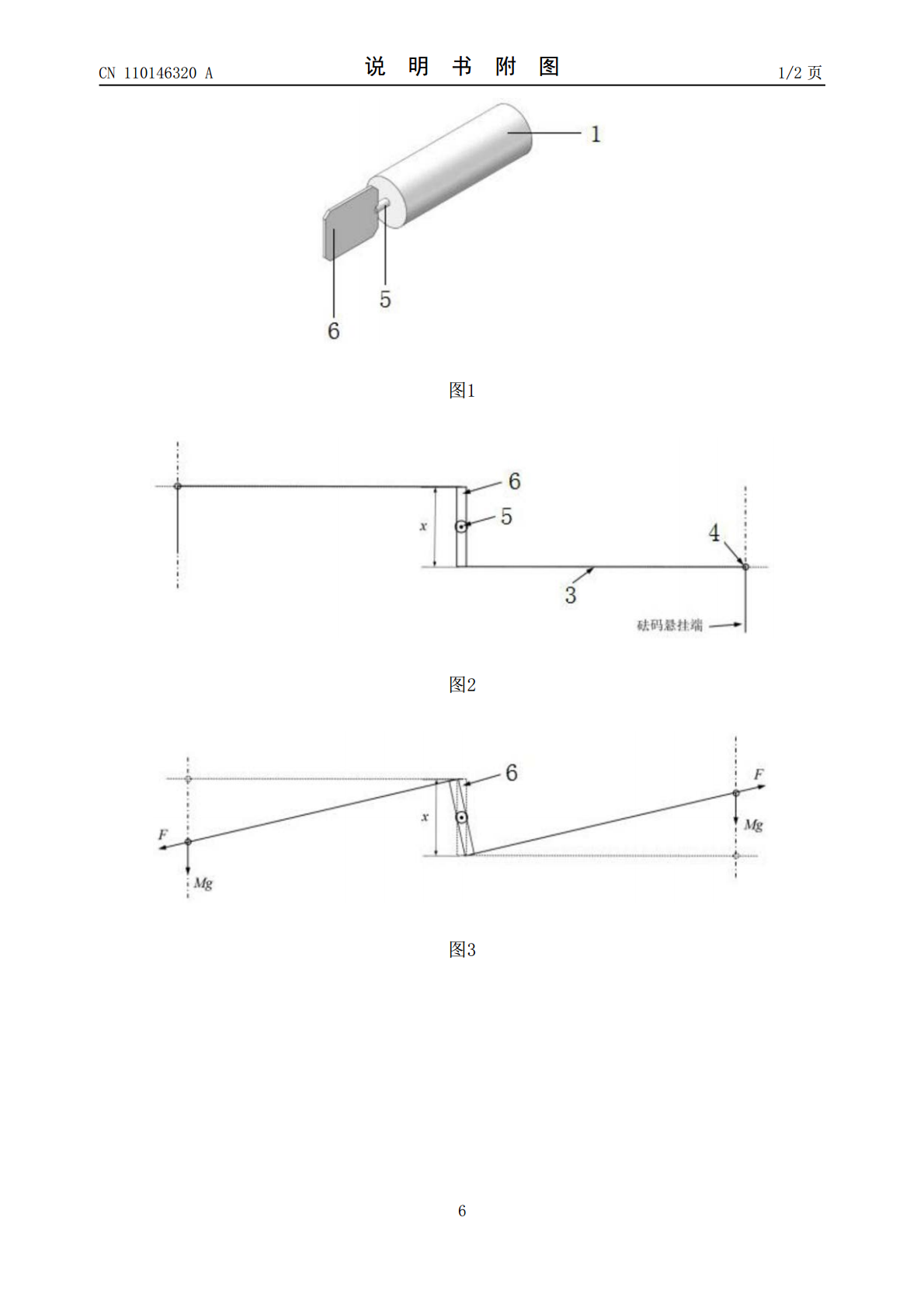
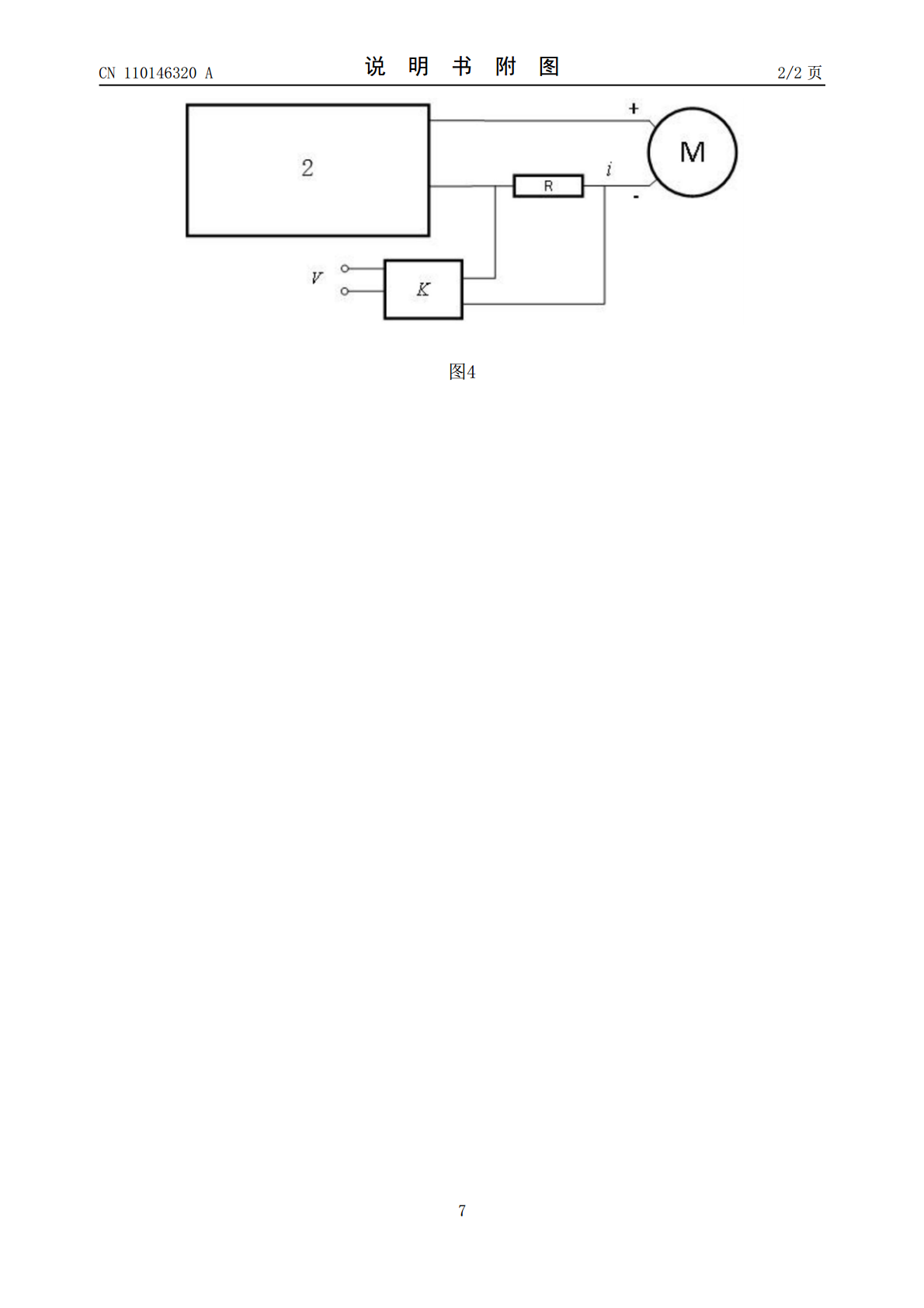
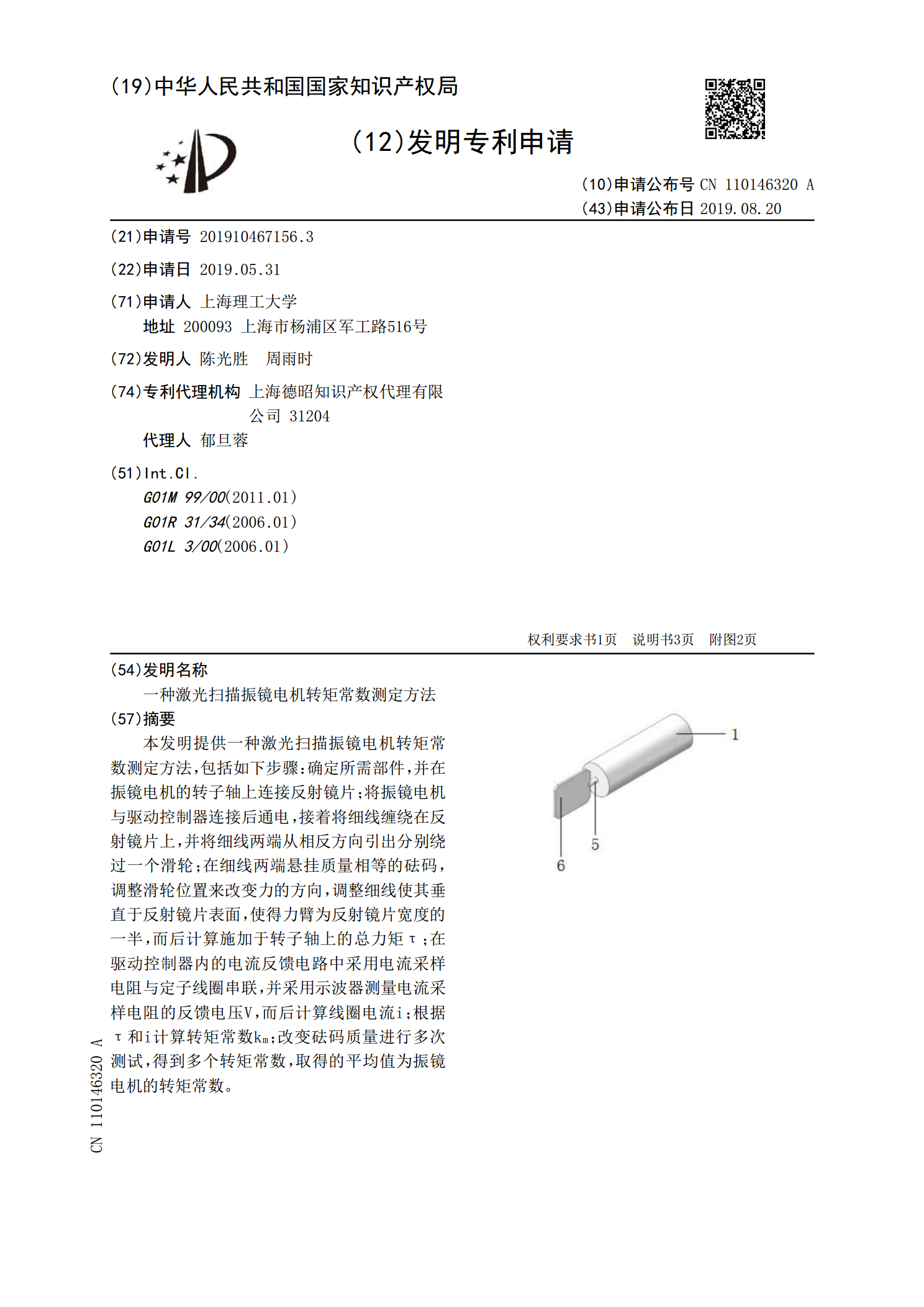
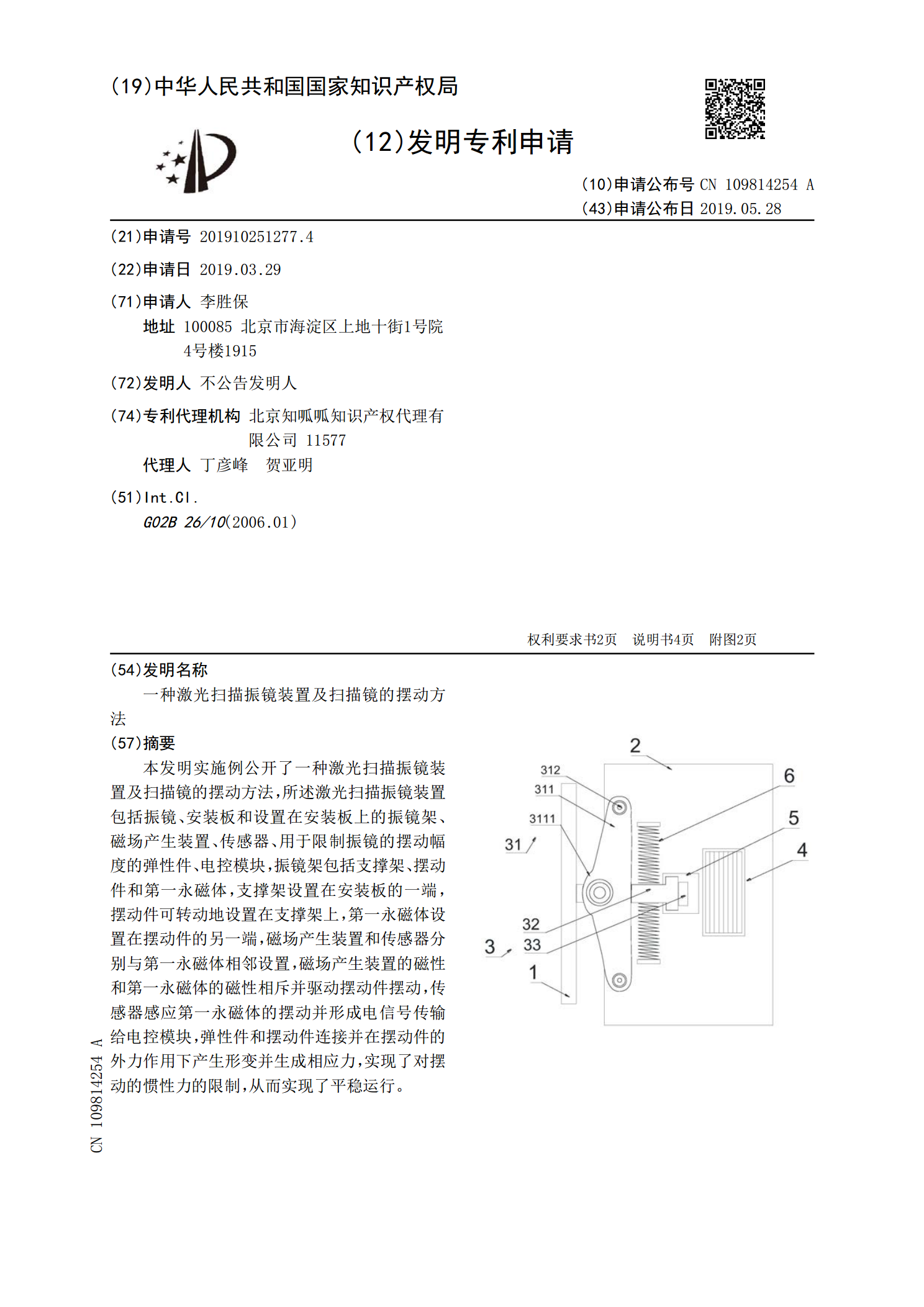
本发明提供一种激光扫描振镜电机转矩常数测定方法,包括如下步骤:确定所需部件,并在振镜电机的转子轴上连接反射镜片;将振镜电机与驱动控制器连接后通电,接着将细线缠绕在反射镜片上,并将细线两端从相反方向引出分别绕过一个滑轮;在细线两端悬挂质量相等的砝码,调整滑轮位置来改变力的方向,调整细线使其垂直于反射镜片表面,使得力臂为反射镜片宽度的一半,而后计算施加于转子轴上的总力矩τ;在驱动控制器内的电流反馈电路中采用电流采样电阻与定子线圈串联,并采用示波器测量电流采样电阻的反馈电压V,而后计算线圈电流i;根据τ和i计算
一种激光扫描振镜装置及扫描镜的摆动方法.pdf
本发明实施例公开了一种激光扫描振镜装置及扫描镜的摆动方法,所述激光扫描振镜装置包括振镜、安装板和设置在安装板上的振镜架、磁场产生装置、传感器、用于限制振镜的摆动幅度的弹性件、电控模块,振镜架包括支撑架、摆动件和第一永磁体,支撑架设置在安装板的一端,摆动件可转动地设置在支撑架上,第一永磁体设置在摆动件的另一端,磁场产生装置和传感器分别与第一永磁体相邻设置,磁场产生装置的磁性和第一永磁体的磁性相斥并驱动摆动件摆动,传感器感应第一永磁体的摆动并形成电信号传输给电控模块,弹性件和摆动件连接并在摆动件的外力作用下产
一种激光扫描振镜电机的力学性能测试平台.pdf
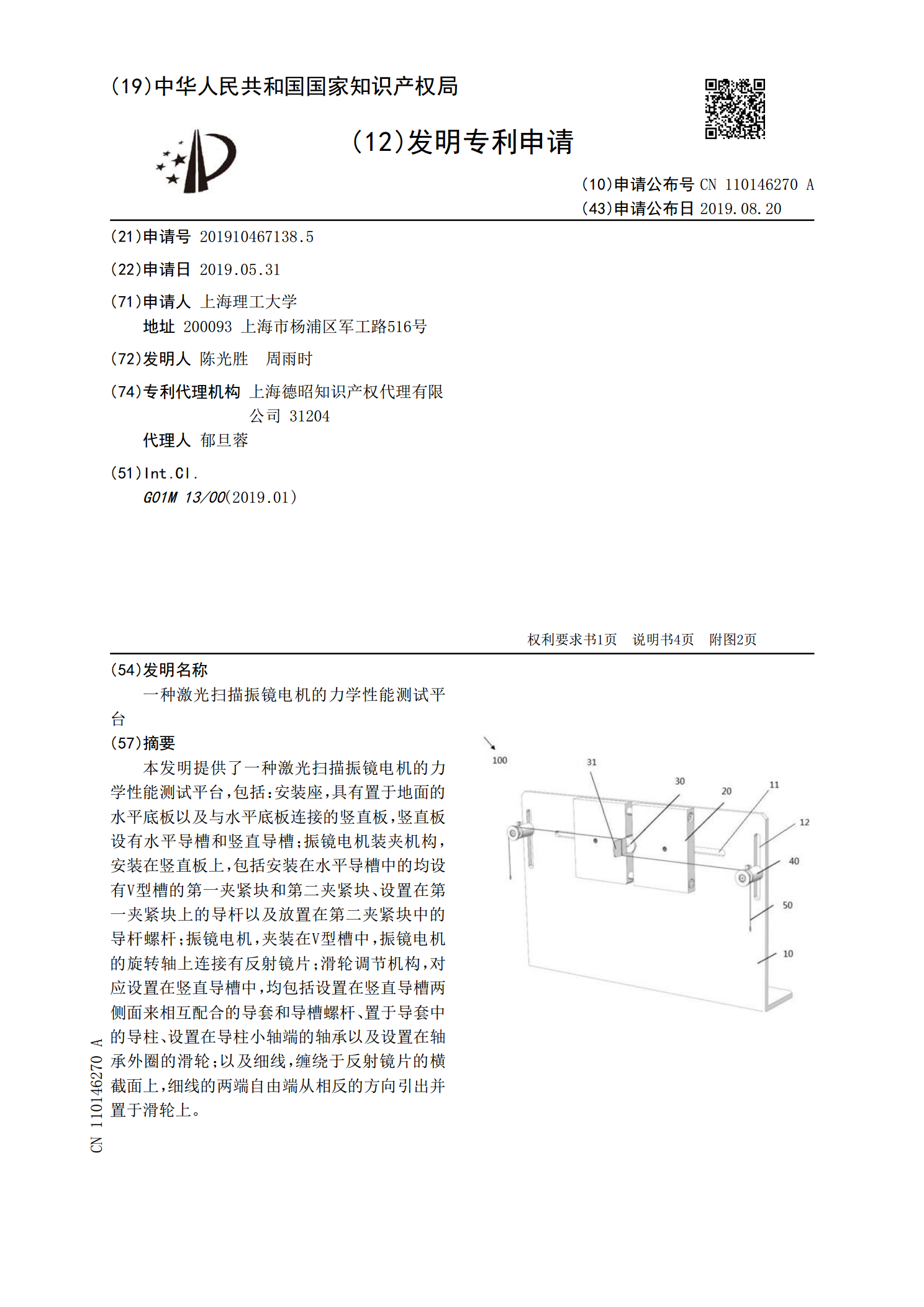
本发明提供了一种激光扫描振镜电机的力学性能测试平台,包括:安装座,具有置于地面的水平底板以及与水平底板连接的竖直板,竖直板设有水平导槽和竖直导槽;振镜电机装夹机构,安装在竖直板上,包括安装在水平导槽中的均设有V型槽的第一夹紧块和第二夹紧块、设置在第一夹紧块上的导杆以及放置在第二夹紧块中的导杆螺杆;振镜电机,夹装在V型槽中,振镜电机的旋转轴上连接有反射镜片;滑轮调节机构,对应设置在竖直导槽中,均包括设置在竖直导槽两侧面来相互配合的导套和导槽螺杆、置于导套中的导柱、设置在导柱小轴端的轴承以及设置在轴承外圈的滑

电机转矩的一种实用测定方法.docx
电机转矩的一种实用测定方法电机转矩的一种实用测定方法摘要:电机转矩是电机运转时输出力矩的大小,是评估电机性能的重要参数之一。本文将介绍一种实用的电机转矩测定方法,该方法使用了一种称为电阻层切割法的技术。该方法可以测定电机在不同转速下的输出转矩,并且具有简单、准确、可靠的特点。本文将阐述该方法的原理、实施步骤及其应用,为电机转矩测定提供一种参考方法。关键词:电机转矩,测定方法,电阻层切割法1.引言电机转矩是衡量电机动力输出的重要参数之一,也是评估电机性能的重要指标之一。在电机设计和应用中,对转矩的准确测定具

一种多激光单振镜3D打印扫描方法.pdf
本发明涉及一种多激光单振镜3D打印扫描方法,属于3D打印技术领域,该方法包括以下步骤:1)沿一条直线等间距排列的多个激光分别向振镜的同一个位置发射光束,光束经过振镜反射后投影至激光打印工作面上,形成多个等直径的光斑,根据光斑直径以及各光斑连线的方向确定扫描方向;2)生成一个打印数据包,基于各光斑连线与扫描方向的夹角、扫描速度和光斑直径计算相邻两个激光的启动的延时时长,进而计算出每个激光的实际启动时间,用实际启动时间代替打印数据包中初始启动时间,按照替换启动时间后的数据包完成打印图像的扫描,本发明在实现高效