
清洁机器人和清洁系统.pdf

宜欣****外呢

1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
清洁机器人和清洁系统.pdf
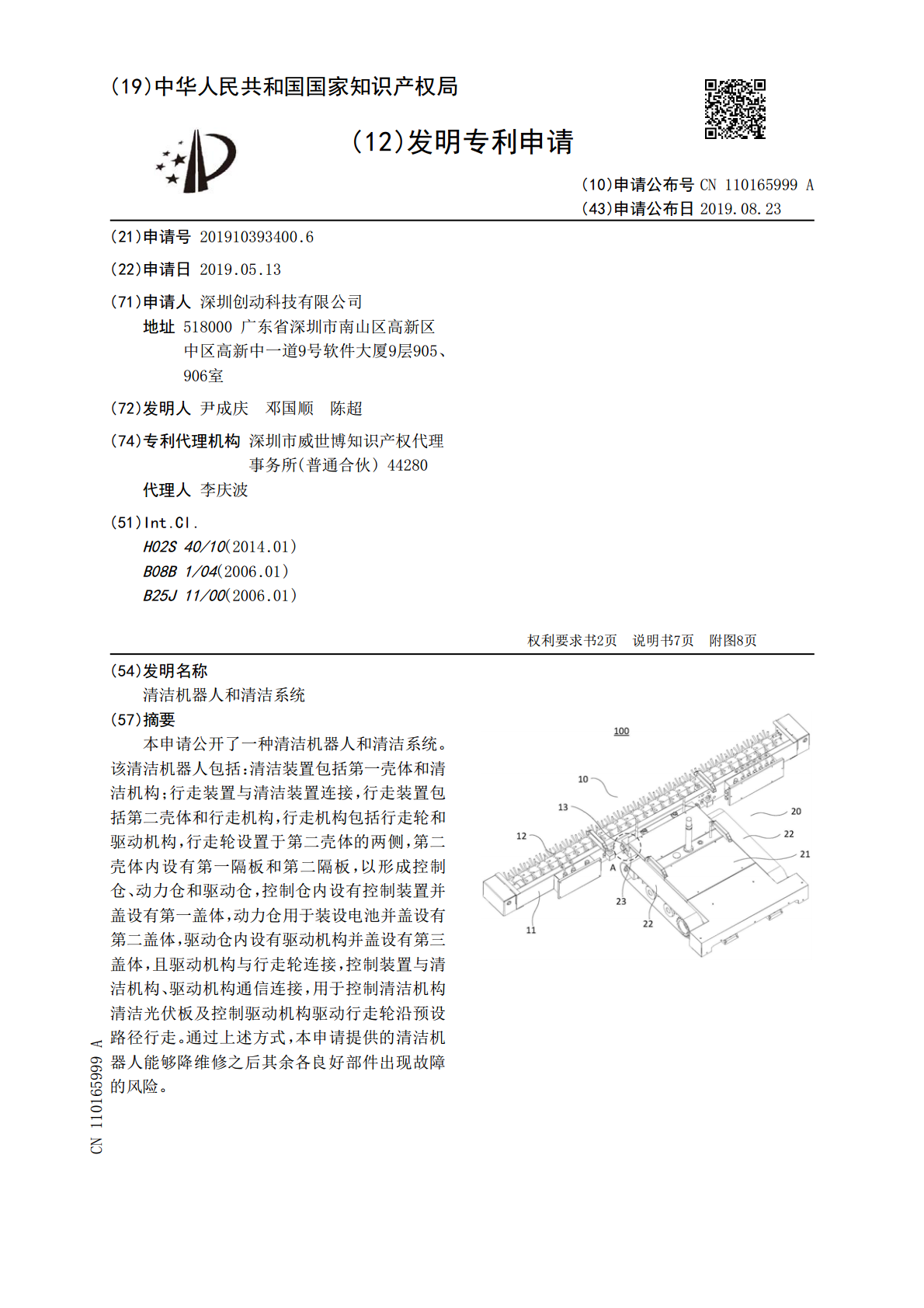
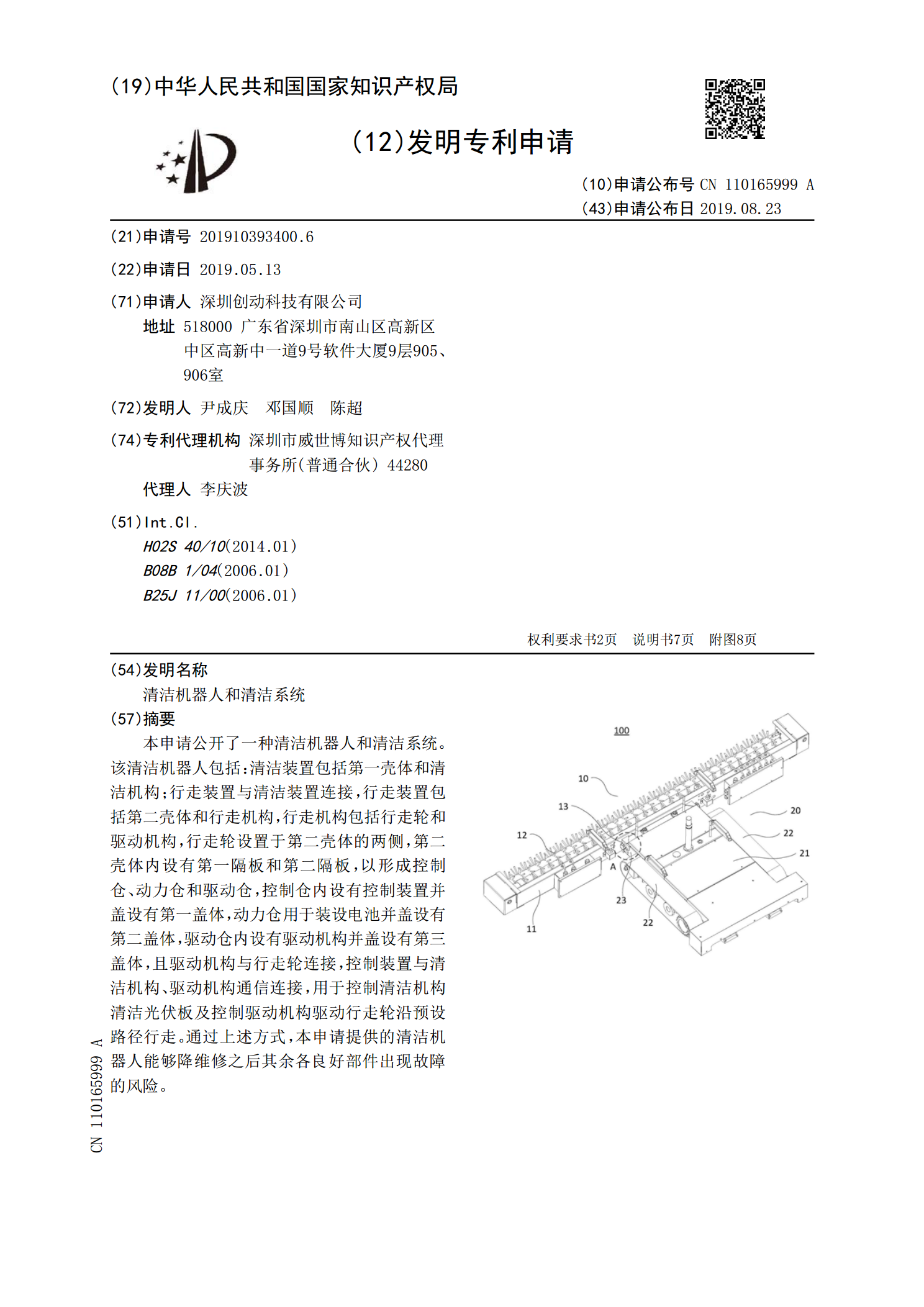
本申请公开了一种清洁机器人和清洁系统。该清洁机器人包括:清洁装置包括第一壳体和清洁机构;行走装置与清洁装置连接,行走装置包括第二壳体和行走机构,行走机构包括行走轮和驱动机构,行走轮设置于第二壳体的两侧,第二壳体内设有第一隔板和第二隔板,以形成控制仓、动力仓和驱动仓,控制仓内设有控制装置并盖设有第一盖体,动力仓用于装设电池并盖设有第二盖体,驱动仓内设有驱动机构并盖设有第三盖体,且驱动机构与行走轮连接,控制装置与清洁机构、驱动机构通信连接,用于控制清洁机构清洁光伏板及控制驱动机构驱动行走轮沿预设路径行走。通过

清洁机器人和清洁机器人系统.pdf
本发明涉及清洁机器人技术领域,特别涉及一种清洁机器人和清洁机器人系统。本发明所提供的清洁机器人,其包括用于拖擦地面的拖擦件,因此,能够实现拖地功能,可以清除地面上的顽固污渍,可以改善地面清洁效果。而且,刮挡结构可以防止垃圾和/或污水残留于被拖擦单元所拖擦过的地面上,实现二次清洁。
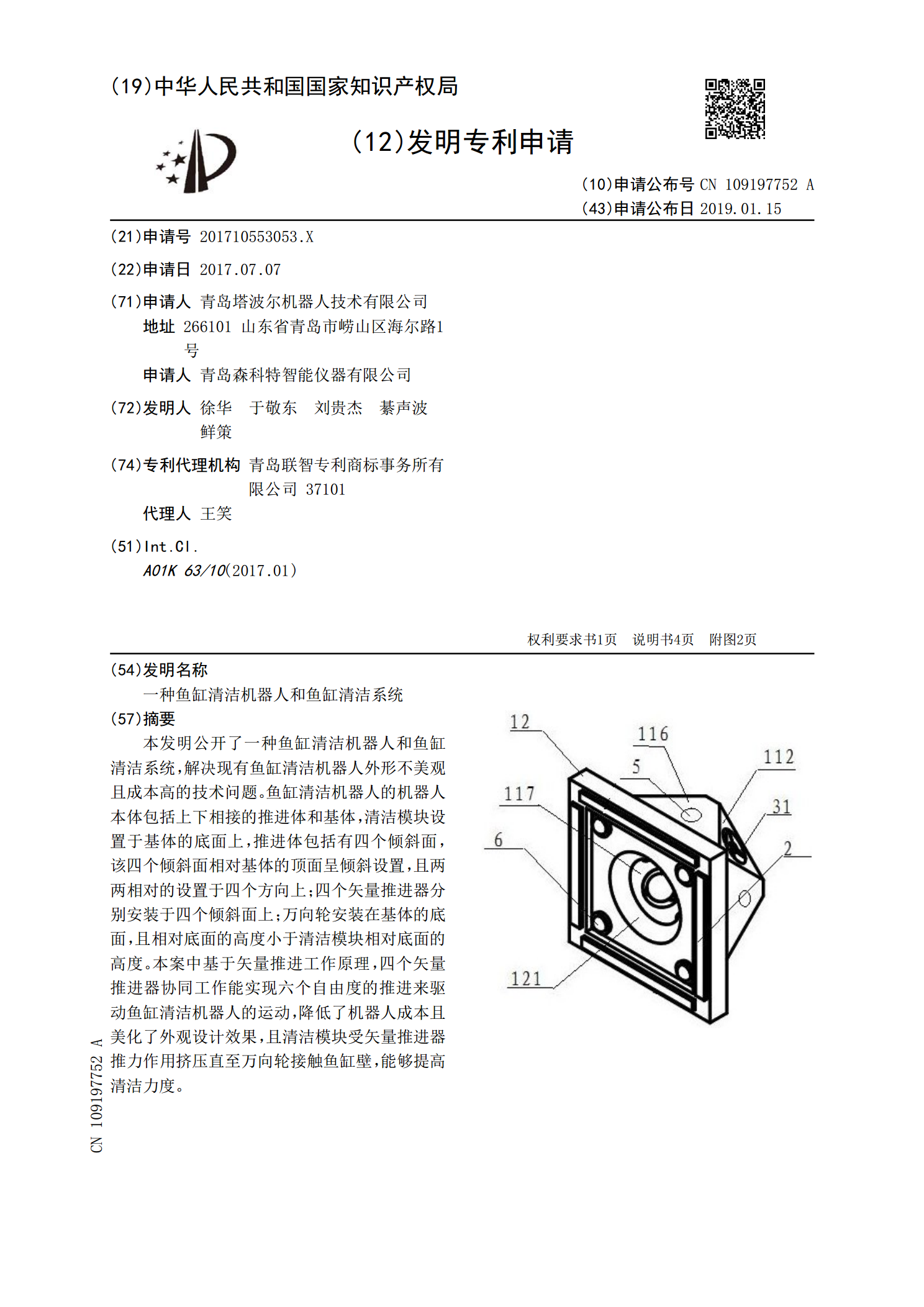
一种鱼缸清洁机器人和鱼缸清洁系统.pdf
本发明公开了一种鱼缸清洁机器人和鱼缸清洁系统,解决现有鱼缸清洁机器人外形不美观且成本高的技术问题。鱼缸清洁机器人的机器人本体包括上下相接的推进体和基体,清洁模块设置于基体的底面上,推进体包括有四个倾斜面,该四个倾斜面相对基体的顶面呈倾斜设置,且两两相对的设置于四个方向上;四个矢量推进器分别安装于四个倾斜面上;万向轮安装在基体的底面,且相对底面的高度小于清洁模块相对底面的高度。本案中基于矢量推进工作原理,四个矢量推进器协同工作能实现六个自由度的推进来驱动鱼缸清洁机器人的运动,降低了机器人成本且美化了外观设计

泳池清洁机器人和泳池清理方法.pdf
本申请涉及一种泳池清洁机器人和泳池清理方法,属于自动控制技术领域,包括:壳体、移动机构、清理机构、目标物信息获取模块和控制模块,通过控制模块获取目标物信息获取模块获取到的信息,该信息为表示工作水域内目标物的分布情况的信息;根据该信息控制移动机构和清理机构运行;可以解决现有的泳池清洁机器人清理漂浮物的耗时较长,导致清理漂浮物的效率较低的问题;由于可以根据目标物的分布情况有目的地向目标物移动,因此可以提高清理漂浮物的效率。同时可以解决现有的泳池清洁机器人的清理机构一直处于运行状态,导致浪费泳池清洁机器人的设备
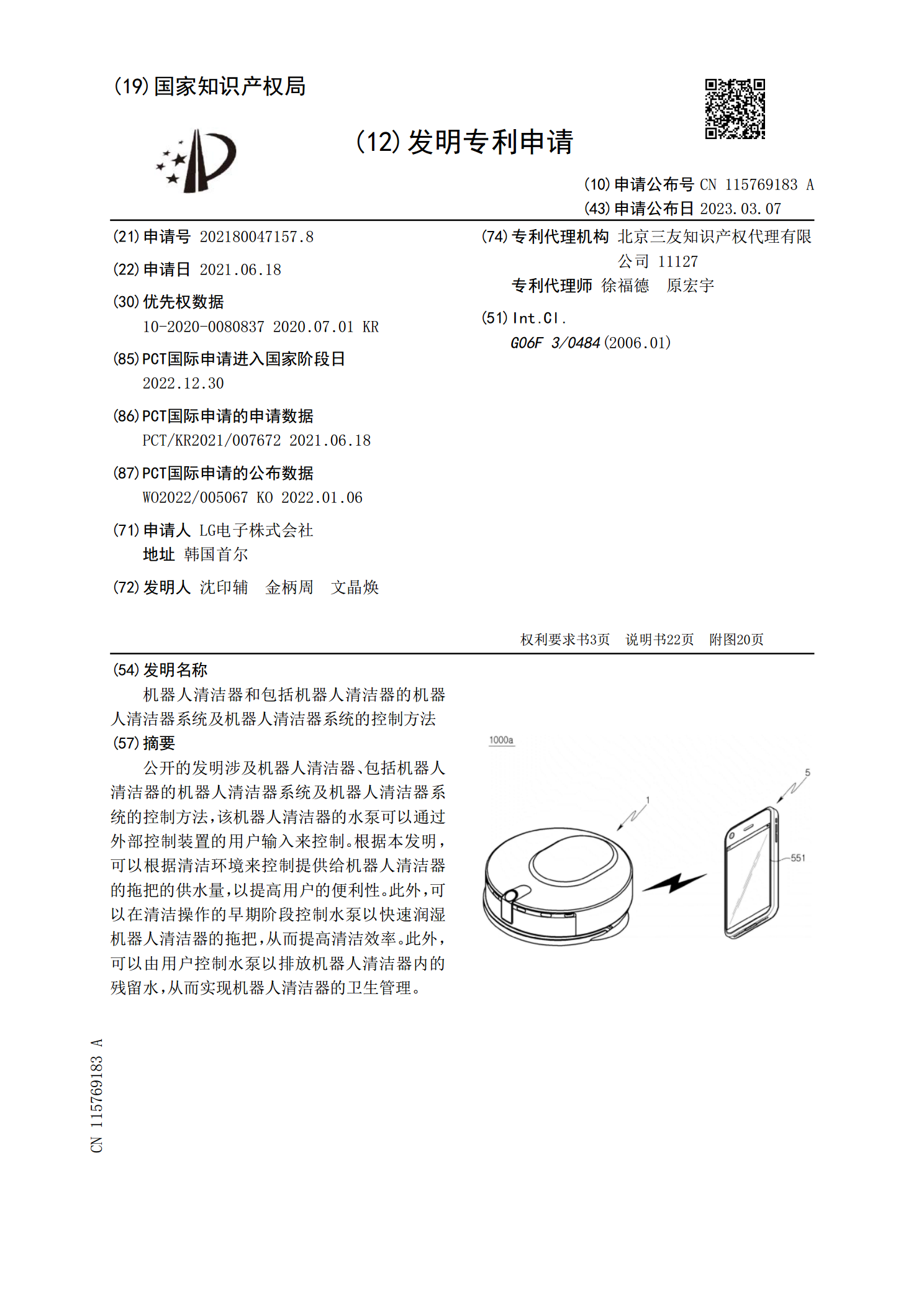
机器人清洁器和包括机器人清洁器的机器人清洁器系统及机器人清洁器系统的控制方法.pdf
公开的发明涉及机器人清洁器、包括机器人清洁器的机器人清洁器系统及机器人清洁器系统的控制方法,该机器人清洁器的水泵可以通过外部控制装置的用户输入来控制。根据本发明,可以根据清洁环境来控制提供给机器人清洁器的拖把的供水量,以提高用户的便利性。此外,可以在清洁操作的早期阶段控制水泵以快速润湿机器人清洁器的拖把,从而提高清洁效率。此外,可以由用户控制水泵以排放机器人清洁器内的残留水,从而实现机器人清洁器的卫生管理。