
一种封闭式内摆线活齿减速器.pdf

灵波****ng

1/8

2/8
3/8
4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种封闭式内摆线活齿减速器.pdf
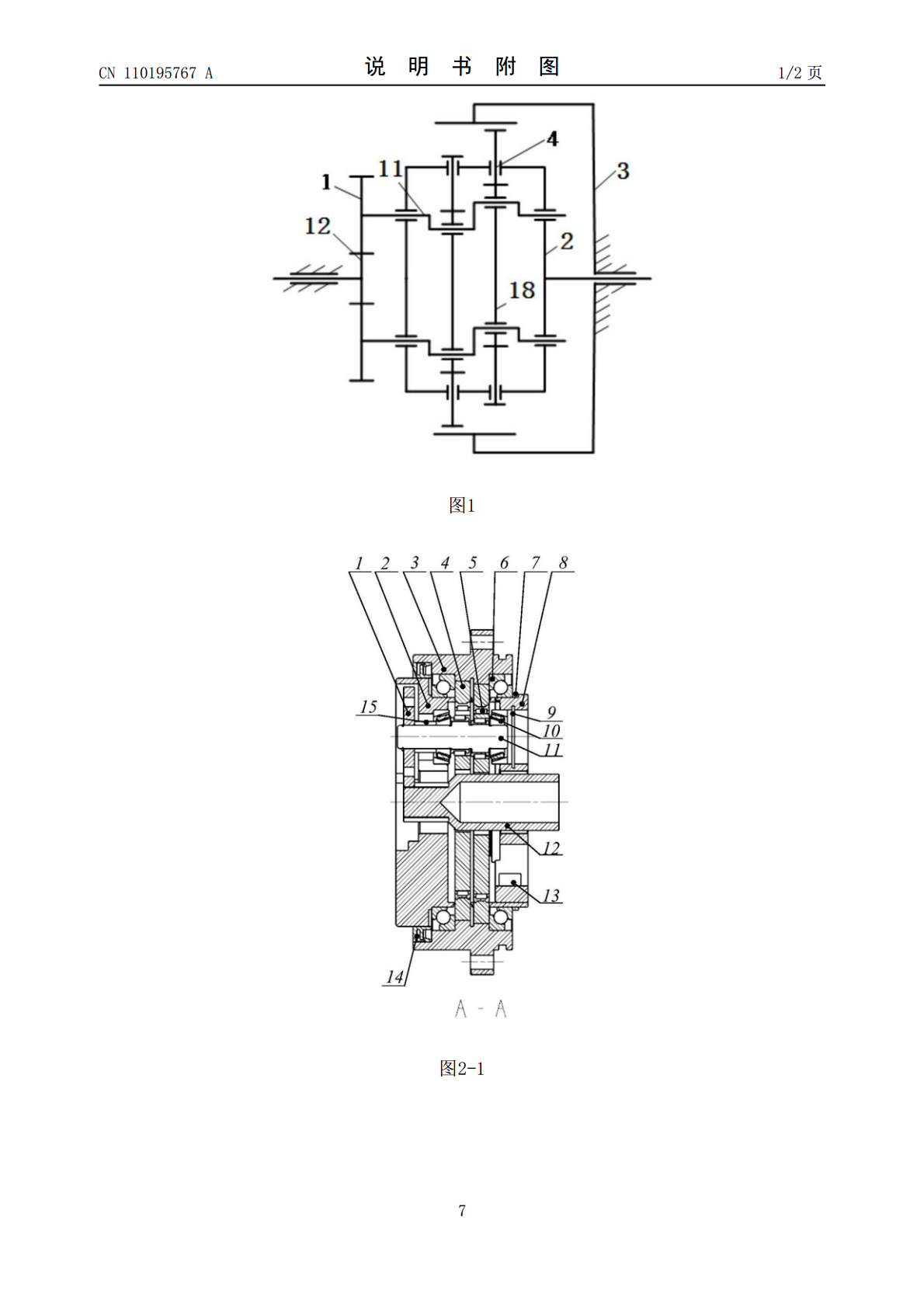
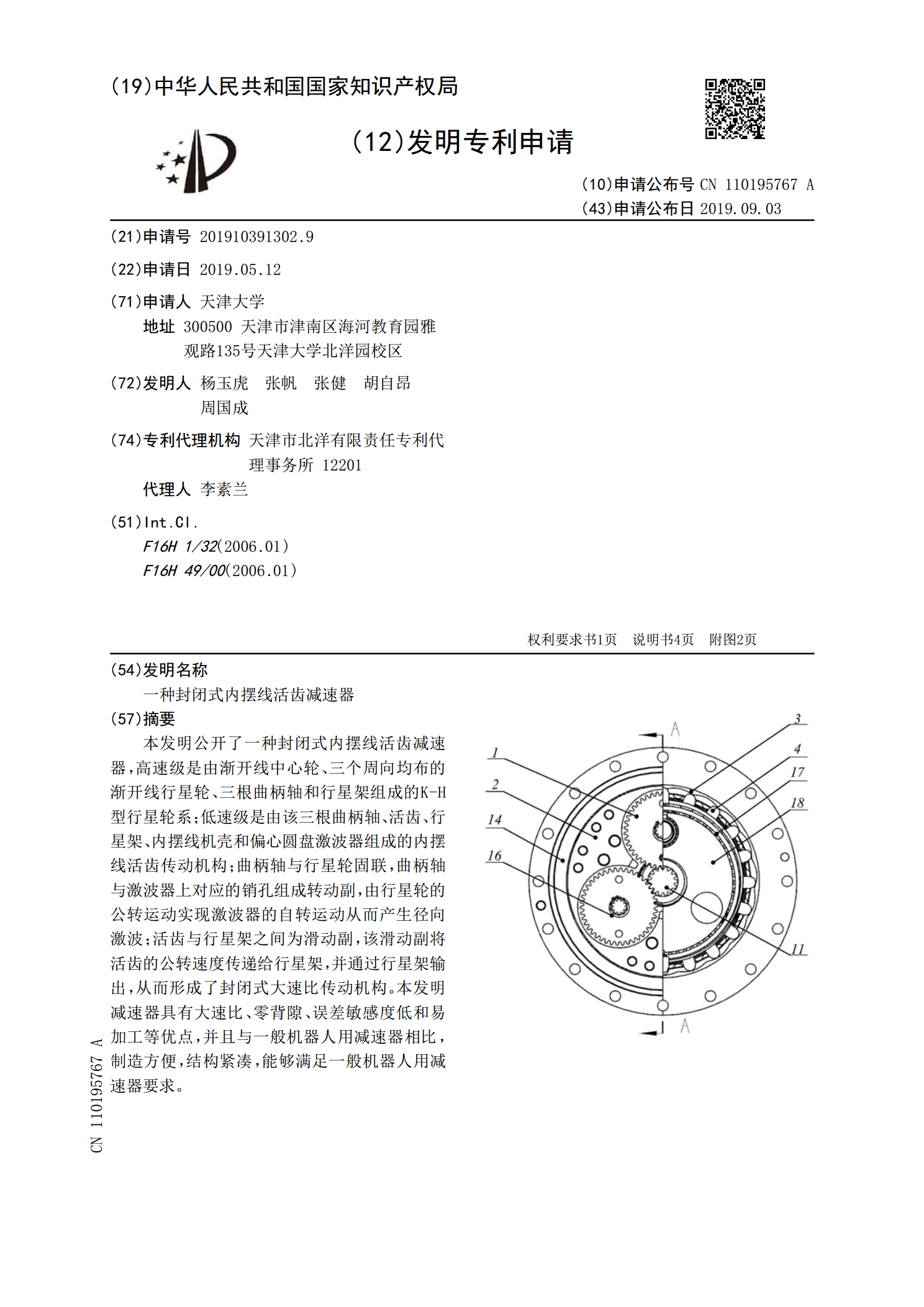
本发明公开了一种封闭式内摆线活齿减速器,高速级是由渐开线中心轮、三个周向均布的渐开线行星轮、三根曲柄轴和行星架组成的K‑H型行星轮系;低速级是由该三根曲柄轴、活齿、行星架、内摆线机壳和偏心圆盘激波器组成的内摆线活齿传动机构;曲柄轴与行星轮固联,曲柄轴与激波器上对应的销孔组成转动副,由行星轮的公转运动实现激波器的自转运动从而产生径向激波;活齿与行星架之间为滑动副,该滑动副将活齿的公转速度传递给行星架,并通过行星架输出,从而形成了封闭式大速比传动机构。本发明减速器具有大速比、零背隙、误差敏感度低和易加工等优点
一种摆线活齿减速器.pdf
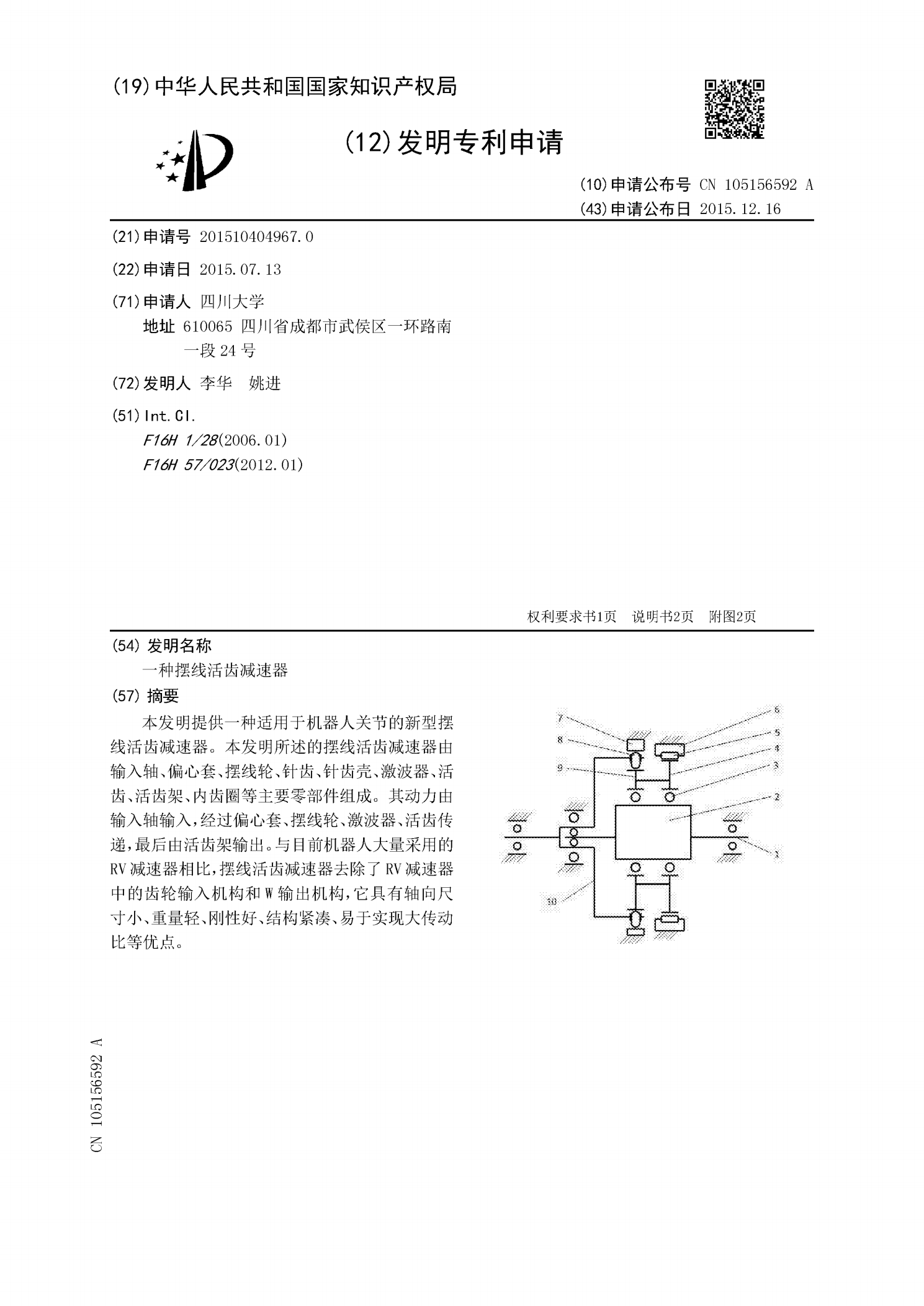
本发明提供一种适用于机器人关节的新型摆线活齿减速器。本发明所述的摆线活齿减速器由输入轴、偏心套、摆线轮、针齿、针齿壳、激波器、活齿、活齿架、内齿圈等主要零部件组成。其动力由输入轴输入,经过偏心套、摆线轮、激波器、活齿传递,最后由活齿架输出。与目前机器人大量采用的RV减速器相比,摆线活齿减速器去除了RV减速器中的齿轮输入机构和W输出机构,它具有轴向尺寸小、重量轻、刚性好、结构紧凑、易于实现大传动比等优点。

精密摆线活齿传动减速器.pdf
本发明涉及一种精密摆线活齿传动减速器,在偏心转臂的偏心轴位通过转臂轴承连接逆向摆线轮和顺向激波盘,心轴位通过支撑轴承连接开设有活齿槽的中活齿架和左活齿架,顺向激波盘夹装在中活齿架和左活齿架之间,逆向摆线轮夹装在固定盘和中活齿架之间,逆向摆线轮、顺向激波盘、中活齿架和左活齿架由穿过连接传动孔的连接轴相连,中活齿架和左活齿架上的活齿槽中活动支承活齿与顺向激波盘相配合且与输出针齿壳上的内齿廓相啮合,外套右针齿销套的右针齿销的两端分别固定在相连的静止针齿壳和固定盘上,右针齿销套与逆向摆线轮相配合。本发明具有高精度
一种双内齿圈摆线减速器.pdf
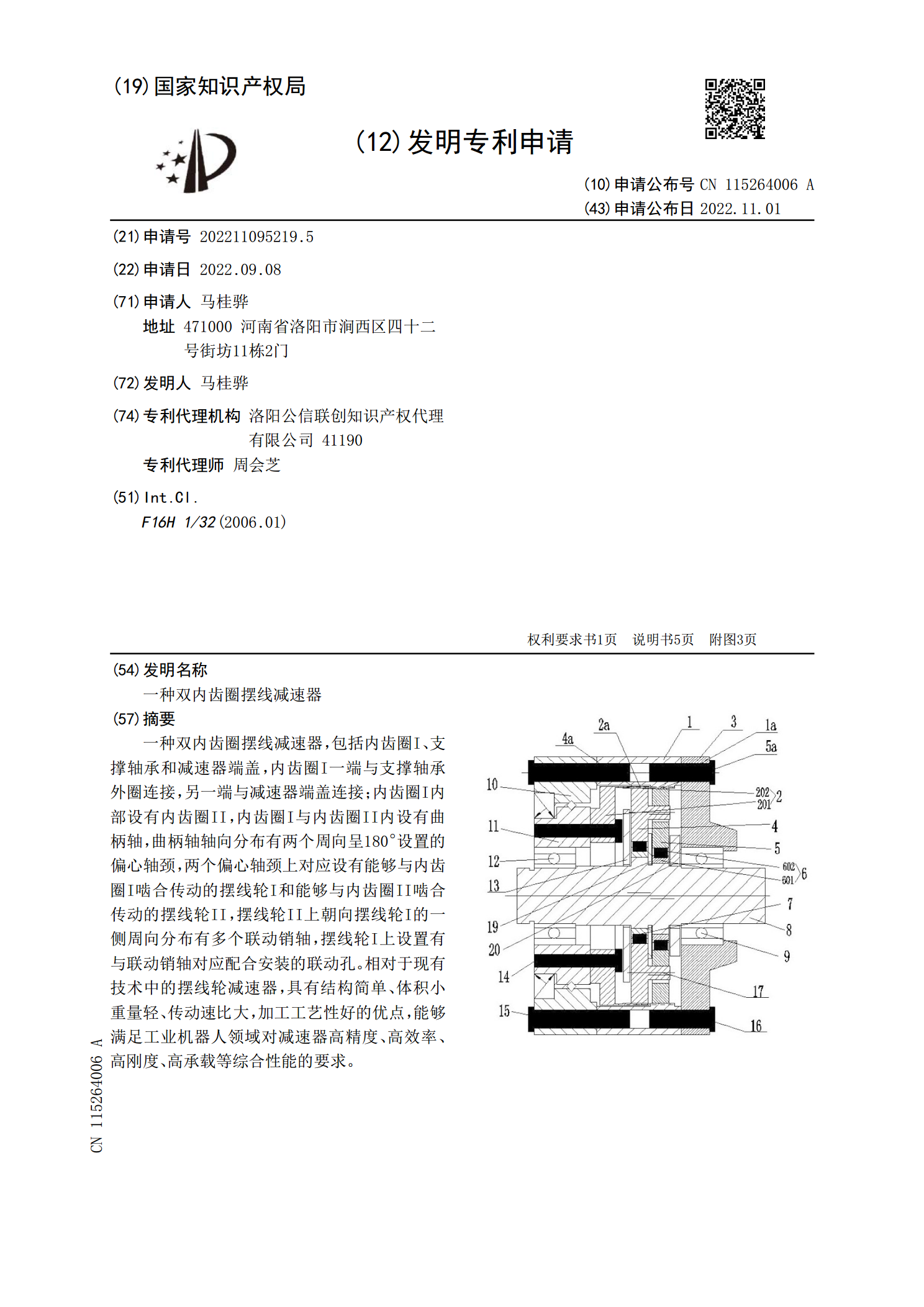
一种双内齿圈摆线减速器,包括内齿圈I、支撑轴承和减速器端盖,内齿圈I一端与支撑轴承外圈连接,另一端与减速器端盖连接;内齿圈I内部设有内齿圈II,内齿圈I与内齿圈II内设有曲柄轴,曲柄轴轴向分布有两个周向呈180°设置的偏心轴颈,两个偏心轴颈上对应设有能够与内齿圈I啮合传动的摆线轮I和能够与内齿圈II啮合传动的摆线轮II,摆线轮II上朝向摆线轮I的一侧周向分布有多个联动销轴,摆线轮I上设置有与联动销轴对应配合安装的联动孔。相对于现有技术中的摆线轮减速器,具有结构简单、体积小重量轻、传动速比大,加工工艺性好的

一种行星摆线减速器针齿壳内齿加工方法.pdf
本发明涉及一种行星摆线减速器针齿壳内齿加工方法,包括以下步骤:⑴.准备好一个已成环形的针齿壳坯体,采用插齿方法加工出一圈均布分布的半圆,单边留0.2‑0.3mm加工余量;⑵.采用内齿磨削方法,磨削半圆孔,单边留0.01‑0.02mm加工余量;⑶.采用豪克能专用加工刀具,进行超声强化半圆孔内表面,采用粗强化‑半精强化‑精强化的方式,达到尺寸要求。本发明提供了一种成型简便、精度更高、表面硬度更高、使用寿命更长的三步法内齿加工方法。解决了现有行星摆线减速器针齿壳内齿加工方法的问题,尤其适合加工行星摆线减速器壳体