
一种电动汽车分布式驱动桥总成.pdf

爱欢****23

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种电动汽车分布式驱动桥总成.pdf
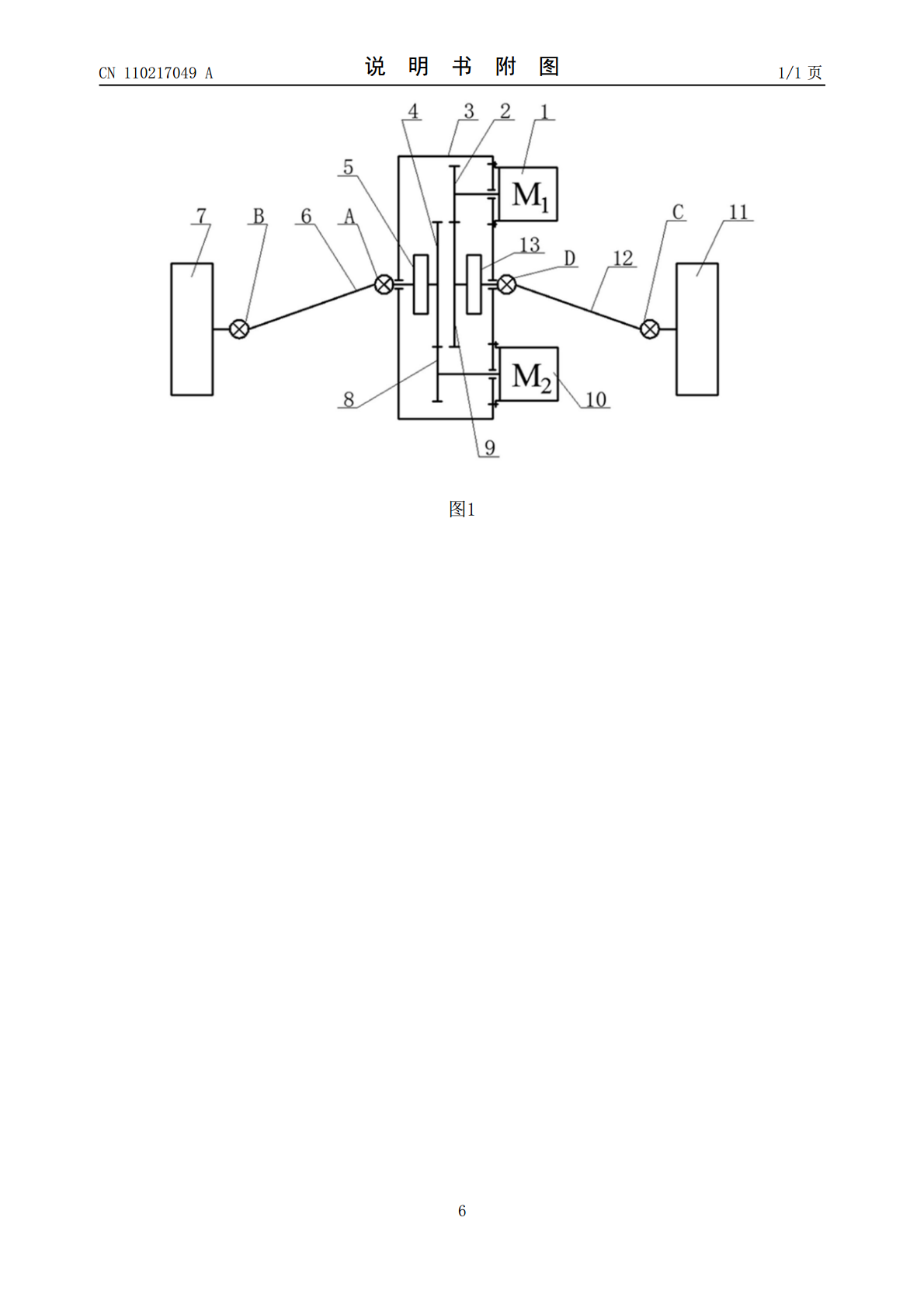
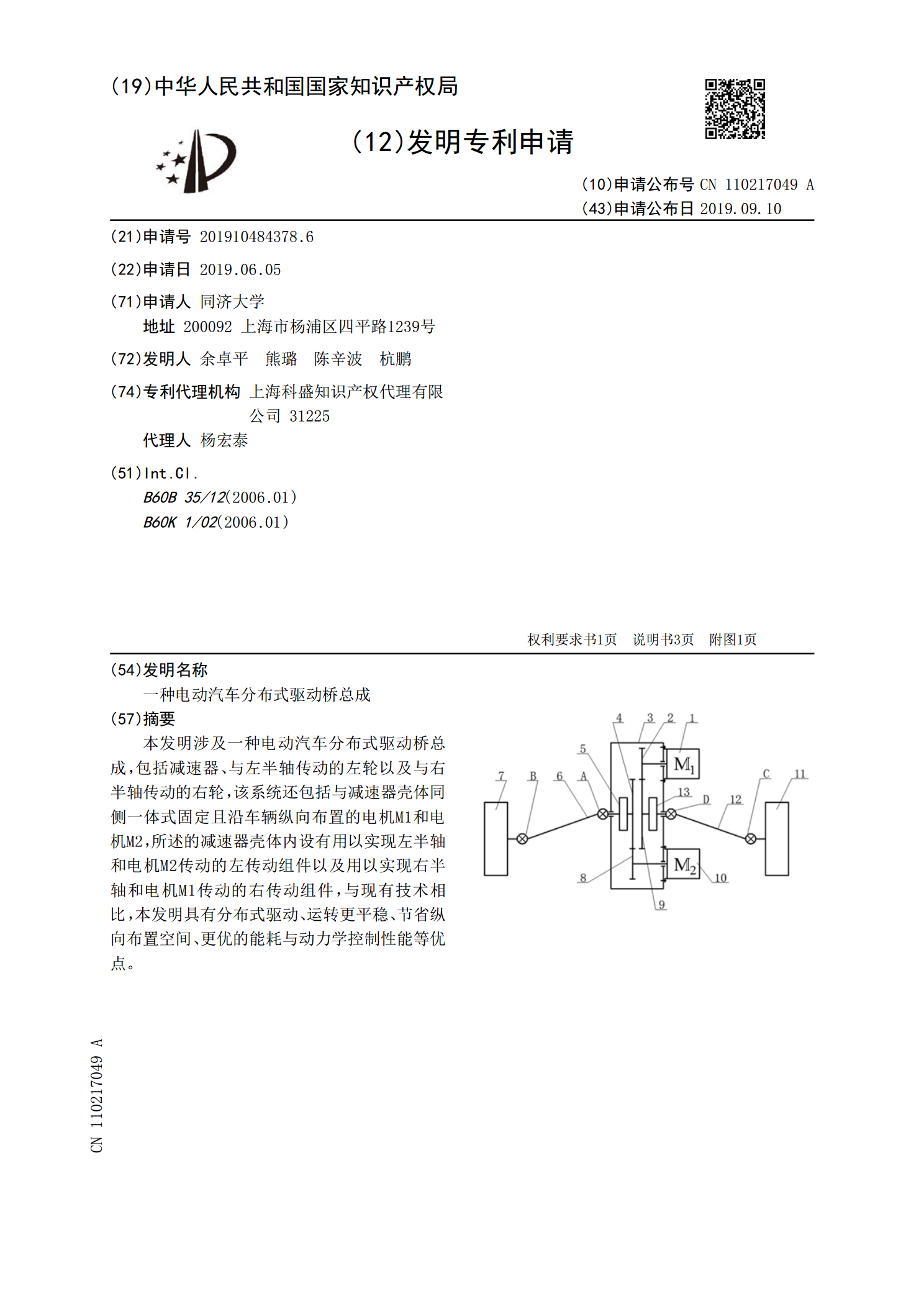
本发明涉及一种电动汽车分布式驱动桥总成,包括减速器、与左半轴传动的左轮以及与右半轴传动的右轮,该系统还包括与减速器壳体同侧一体式固定且沿车辆纵向布置的电机M1和电机M2,所述的减速器壳体内设有用以实现左半轴和电机M2传动的左传动组件以及用以实现右半轴和电机M1传动的右传动组件,与现有技术相比,本发明具有分布式驱动、运转更平稳、节省纵向布置空间、更优的能耗与动力学控制性能等优点。

一种驱动桥总成.pdf
本发明公开了一种驱动桥总成,其属于汽车车桥技术领域。包括依次连接的轴承座、减速器壳和桥壳,其中,轴承座内转动地设置有上贯通轴总成,桥壳内转动地设置有下贯通轴总成,减速器壳内转动地设置有主动锥齿轮,主动锥齿轮的一端选择性地连接于上贯通轴总成,另一端选择性地连接于下贯通轴总成,即主动锥齿轮可以分别与上贯通轴总成同步转动,也可以与下贯通轴总成同步转动;差速器总成设置于桥壳内,主动锥齿轮的齿部与差速器总成的从动锥齿轮啮合,差速器总成左右两侧还分别连接有左半轴和右半轴,用于输出汽车车轮所需要的动力。分别通过上贯通轴

电动汽车同轴直联式驱动桥总成.pdf
一种电动汽车同轴直联式驱动桥总成,解决了现有整体式电动驱动桥结构存在无法满足匹配各种车型底盘要求的问题,包括桥壳,组装在桥壳内的驱动电机、减速器总成、差速器总成以及左、右半轴制动器总成,其技术要点是:桥壳包括筒形壳体总成和左、右桥壳管总成,驱动电机、减速器总成、差速器总成组装在同一筒形壳体总成中,采用行星减速机构的减速器总成的行星齿轮架与差速器总成的剖分式差速器壳连接在一起,差速器总成的两个半轴齿轮分别与左、右半轴制动器总成的左、右半轴以花键配合联接在一起。其结构紧凑,设计合理,载荷分布均匀,质量相对较轻
一种电动汽车前驱动总成.pdf
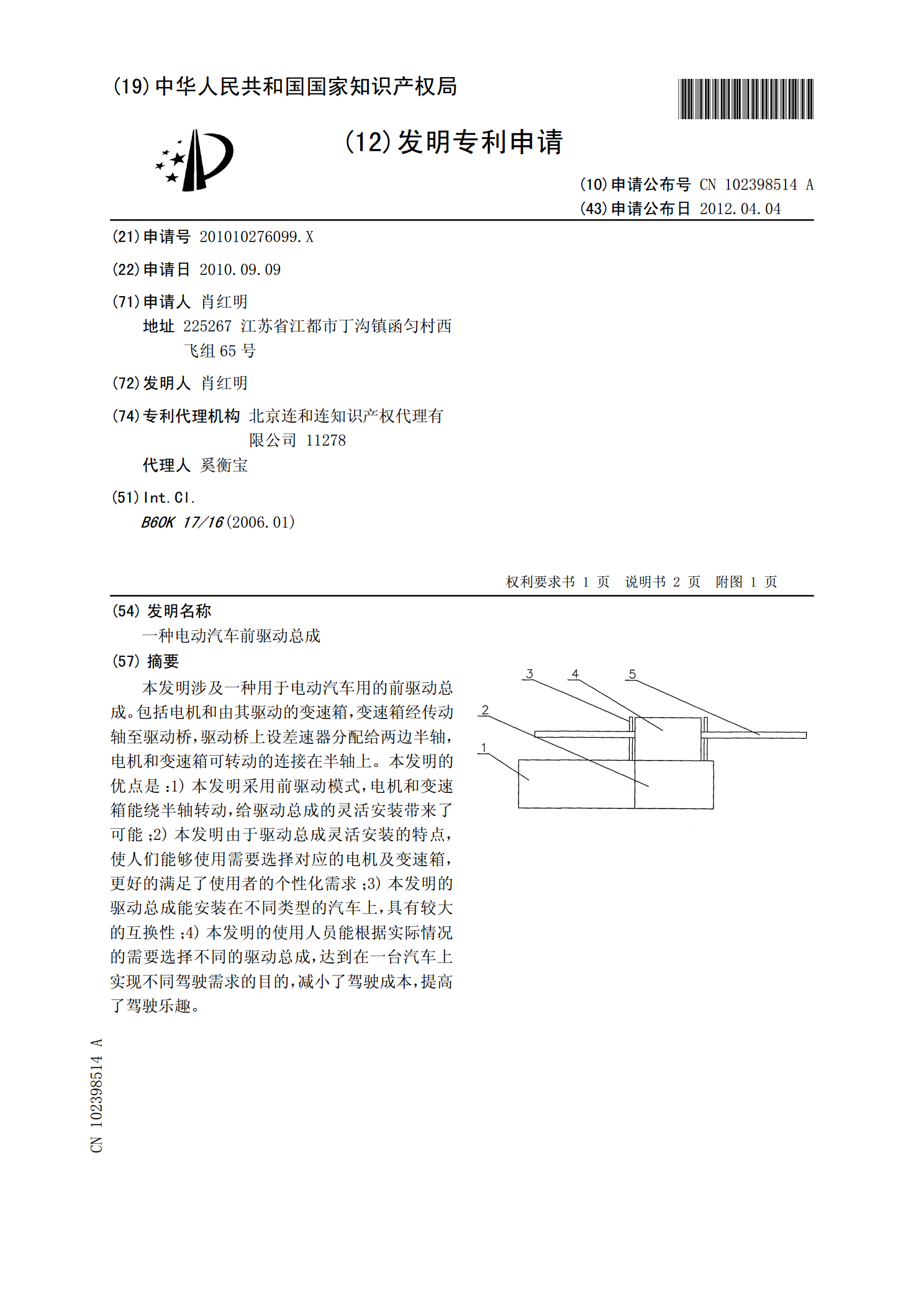
本发明涉及一种用于电动汽车用的前驱动总成。包括电机和由其驱动的变速箱,变速箱经传动轴至驱动桥,驱动桥上设差速器分配给两边半轴,电机和变速箱可转动的连接在半轴上。本发明的优点是:1)本发明采用前驱动模式,电机和变速箱能绕半轴转动,给驱动总成的灵活安装带来了可能;2)本发明由于驱动总成灵活安装的特点,使人们能够使用需要选择对应的电机及变速箱,更好的满足了使用者的个性化需求;3)本发明的驱动总成能安装在不同类型的汽车上,具有较大的互换性;4)本发明的使用人员能根据实际情况的需要选择不同的驱动总成,达到在一台汽车
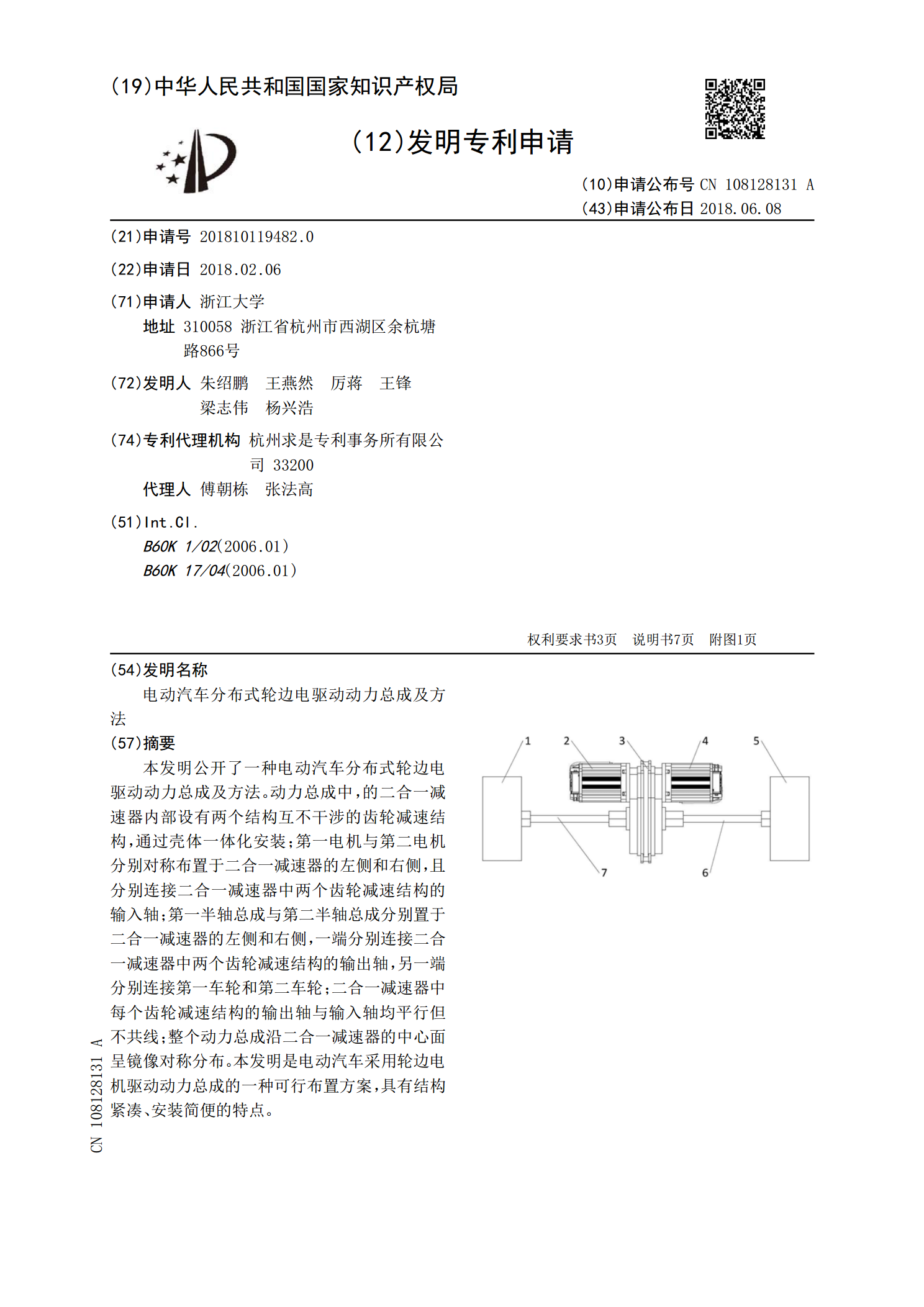
电动汽车分布式轮边电驱动动力总成及方法.pdf
本发明公开了一种电动汽车分布式轮边电驱动动力总成及方法。动力总成中,的二合一减速器内部设有两个结构互不干涉的齿轮减速结构,通过壳体一体化安装;第一电机与第二电机分别对称布置于二合一减速器的左侧和右侧,且分别连接二合一减速器中两个齿轮减速结构的输入轴;第一半轴总成与第二半轴总成分别置于二合一减速器的左侧和右侧,一端分别连接二合一减速器中两个齿轮减速结构的输出轴,另一端分别连接第一车轮和第二车轮;二合一减速器中每个齿轮减速结构的输出轴与输入轴均平行但不共线;整个动力总成沿二合一减速器的中心面呈镜像对称分布。本