
一种基于全局图聚类的平面建筑构件点云轮廓提取方法.pdf

雅云****彩妍

1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于全局图聚类的平面建筑构件点云轮廓提取方法.pdf
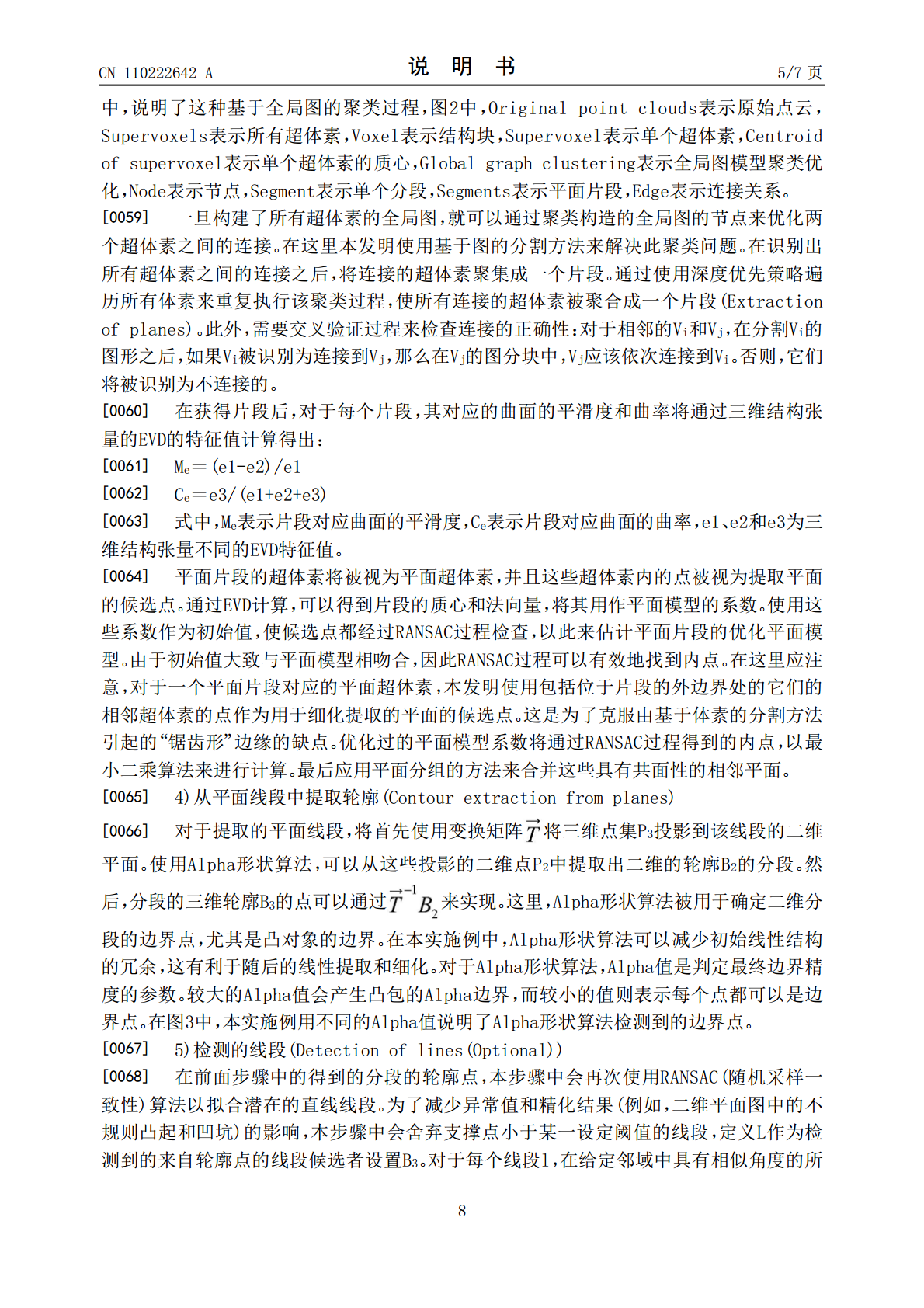
本发明涉及一种基于全局图聚类的平面建筑构件点云轮廓提取方法,该方法包括以下步骤:步骤1:对原始平面建筑三维点云数据采用超体素的几何特征进行表征,获得通过超体素的几何特征进行表征的点云数据;步骤2:针对通过超体素的几何特征进行表征的点云数据构建全局图模型;步骤3:针对全局图模型进行聚类优化并进一步提取得到平面片段;步骤4:从平面片段中提取最终面建筑构件点云轮廓。与现有技术相比,本发明具有轮廓提取精确度高,适用范围广等优点。
一种基于点云的古建筑轮廓提取方法及系统.pdf
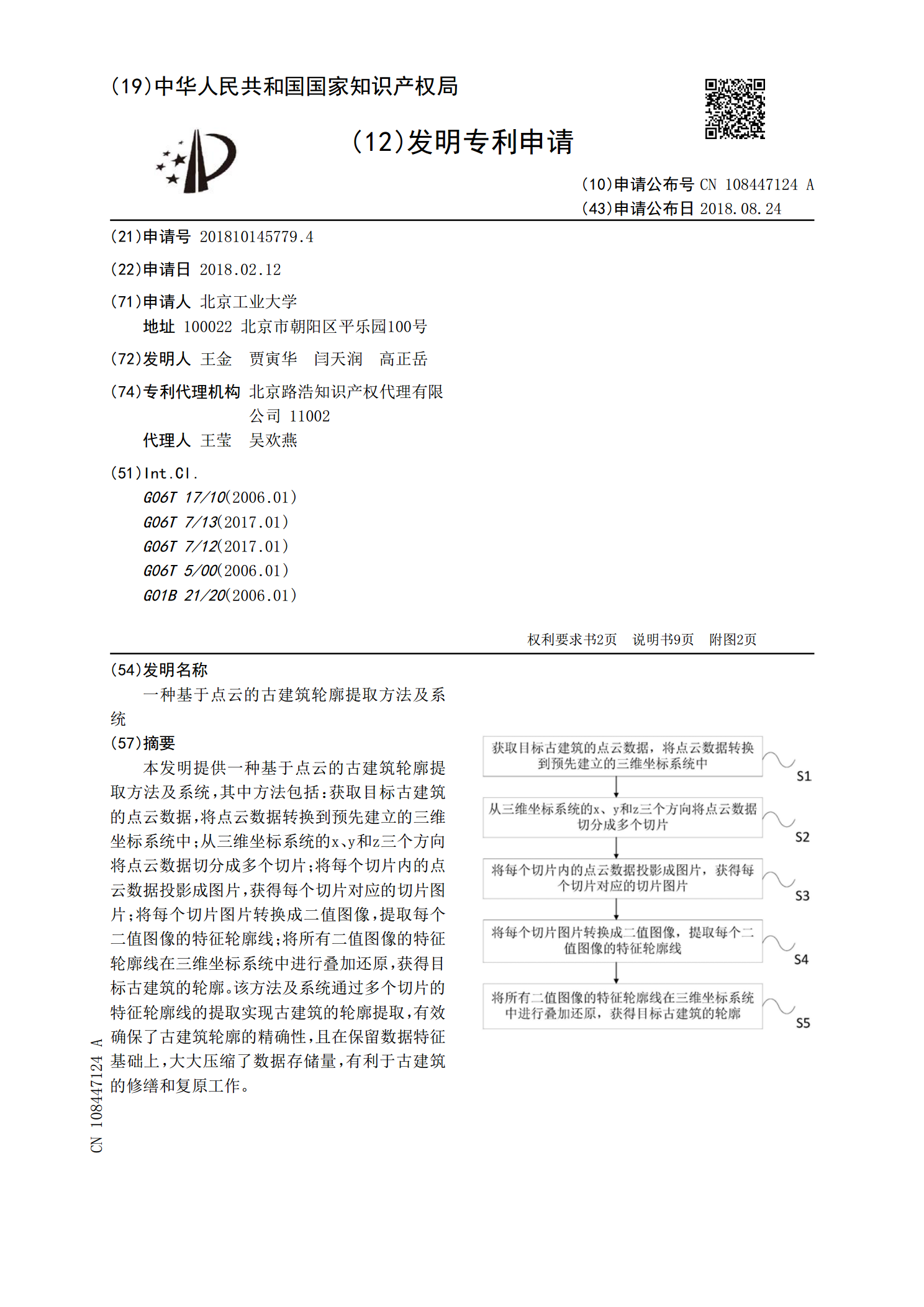
本发明提供一种基于点云的古建筑轮廓提取方法及系统,其中方法包括:获取目标古建筑的点云数据,将点云数据转换到预先建立的三维坐标系统中;从三维坐标系统的x、y和z三个方向将点云数据切分成多个切片;将每个切片内的点云数据投影成图片,获得每个切片对应的切片图片;将每个切片图片转换成二值图像,提取每个二值图像的特征轮廓线;将所有二值图像的特征轮廓线在三维坐标系统中进行叠加还原,获得目标古建筑的轮廓。该方法及系统通过多个切片的特征轮廓线的提取实现古建筑的轮廓提取,有效确保了古建筑轮廓的精确性,且在保留数据特征基础上,

一种基于建筑外轮廓线及激光点云的建筑立面提取方法.pdf
本发明提供了一种基于建筑外轮廓线及激光点云的建筑立面提取方法,包括以下步骤:获取建筑物的外轮廓线;选取地平面即XY平面作为投影面,外轮廓线在XY平面上的投影为多线段P1P2……Pn,选取缓冲区;判断三维全景图像中的激光点是否在缓冲区中,从而得到在缓冲区中的所有的激光点;采用过滤算法,将在缓冲区中的所有激光点进行去噪处理后,根据这些激光点及建筑物外轮廓线,生成建筑物立面。本发明所提供的方法解决了现有技术中的不足,能够自动或半自动地生成建筑物立面,大大缩短街景数据生产和数字城市制作周期,具有非常巨大的经济和社

基于激光点云的建筑物立面轮廓提取.pptx
,目录PartOnePartTwo数据采集方法采集设备及参数设置数据预处理数据质量评估PartThree算法概述算法流程关键技术实现算法评估与优化PartFour实验数据集实验环境与配置实验过程与结果分析结果比较与讨论PartFive城市规划与建设建筑遗产保护虚拟现实与游戏设计广告业与媒体制作PartSix数据采集难度与成本算法鲁棒性与泛化能力应用场景的拓展与深化技术发展趋势与展望THANKS
一种基于图结构的点云聚类GPU优化方法及装置.pdf
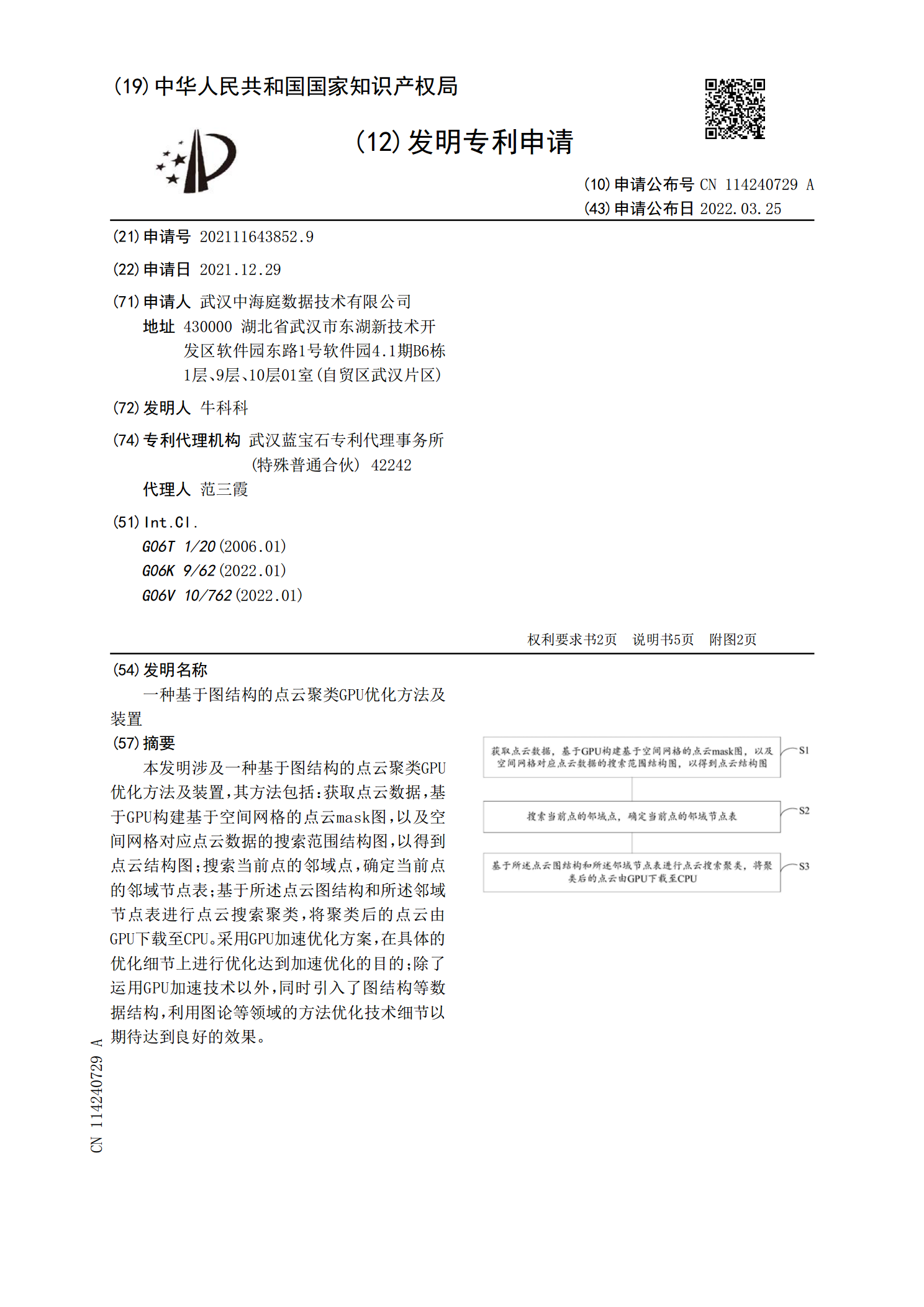
本发明涉及一种基于图结构的点云聚类GPU优化方法及装置,其方法包括:获取点云数据,基于GPU构建基于空间网格的点云mask图,以及空间网格对应点云数据的搜索范围结构图,以得到点云结构图;搜索当前点的邻域点,确定当前点的邻域节点表;基于所述点云图结构和所述邻域节点表进行点云搜索聚类,将聚类后的点云由GPU下载至CPU。采用GPU加速优化方案,在具体的优化细节上进行优化达到加速优化的目的;除了运用GPU加速技术以外,同时引入了图结构等数据结构,利用图论等领域的方法优化技术细节以期待达到良好的效果。