
一种基于图结构的点云聚类GPU优化方法及装置.pdf

一吃****仪凡

1/10

2/10
3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于图结构的点云聚类GPU优化方法及装置.pdf
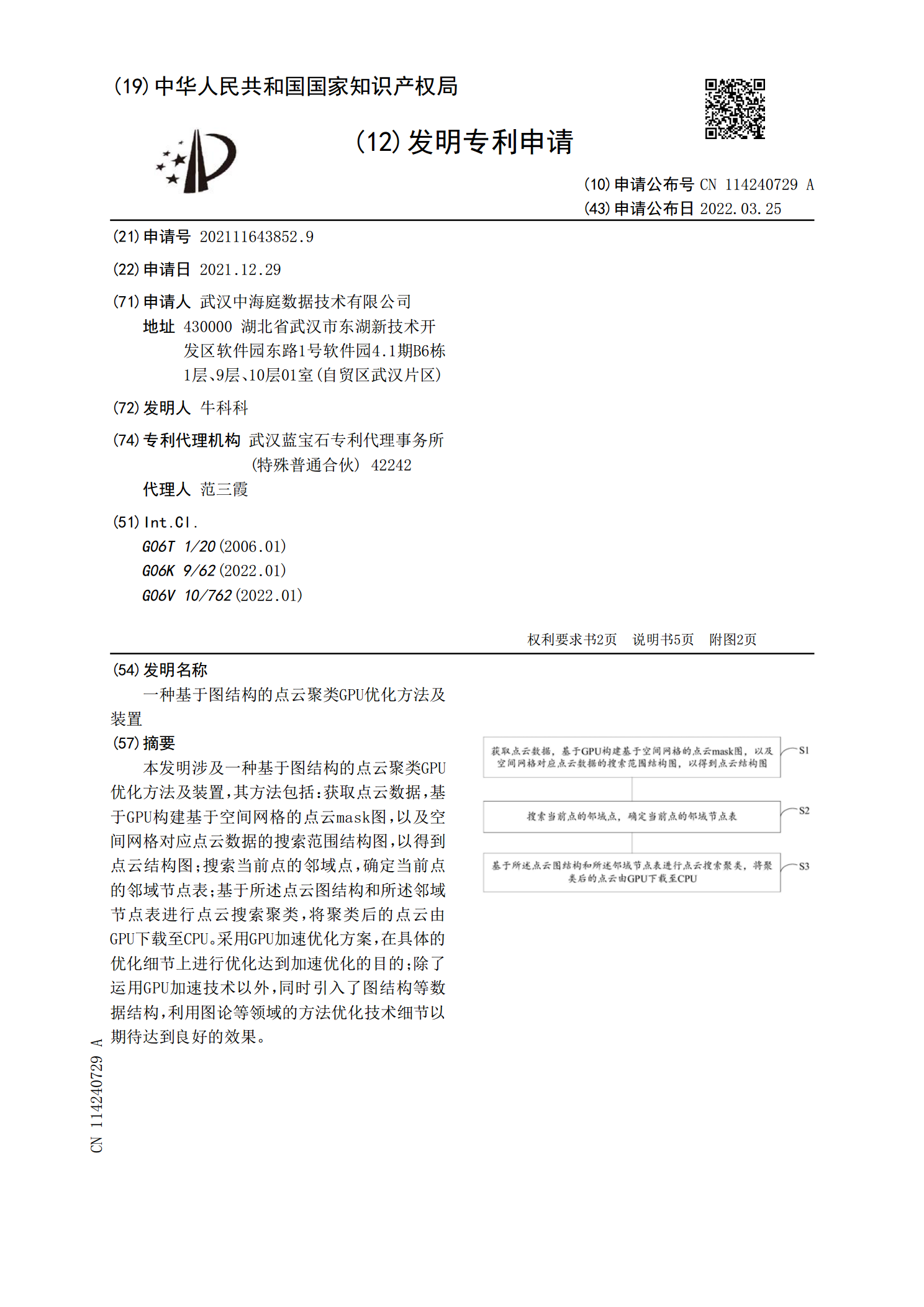
本发明涉及一种基于图结构的点云聚类GPU优化方法及装置,其方法包括:获取点云数据,基于GPU构建基于空间网格的点云mask图,以及空间网格对应点云数据的搜索范围结构图,以得到点云结构图;搜索当前点的邻域点,确定当前点的邻域节点表;基于所述点云图结构和所述邻域节点表进行点云搜索聚类,将聚类后的点云由GPU下载至CPU。采用GPU加速优化方案,在具体的优化细节上进行优化达到加速优化的目的;除了运用GPU加速技术以外,同时引入了图结构等数据结构,利用图论等领域的方法优化技术细节以期待达到良好的效果。

一种基于毫米波雷达点云聚类方法及装置.pdf
本申请提供一种基于毫米波雷达点云聚类方法及装置,通过获取待检测目标的当前帧雷达点云信息以及上一帧跟踪输出的航迹信息;然后按照预设算法将所述当前帧雷达点云信息与所述上一帧跟踪输出的航迹信息进行关联,得到所述待检测目标的航迹坐标、航向角以及车型分类;最后以椭圆波门为先验知识以及以所述待检测目标的航迹坐标、航向角以及车型分类为后验知识,对所述待检测目标进行点云聚类。本申请根据车辆为长方形这一先验知识,把聚类中核心对象计算所用的波门设定为椭圆,点云样本通过关联航迹获得航向角和车型分类,再通过航向角和车型分类改变椭

一种基于全局图聚类的平面建筑构件点云轮廓提取方法.pdf
本发明涉及一种基于全局图聚类的平面建筑构件点云轮廓提取方法,该方法包括以下步骤:步骤1:对原始平面建筑三维点云数据采用超体素的几何特征进行表征,获得通过超体素的几何特征进行表征的点云数据;步骤2:针对通过超体素的几何特征进行表征的点云数据构建全局图模型;步骤3:针对全局图模型进行聚类优化并进一步提取得到平面片段;步骤4:从平面片段中提取最终面建筑构件点云轮廓。与现有技术相比,本发明具有轮廓提取精确度高,适用范围广等优点。

一种基于GPU的图分析算法通用优化方法.pdf
本发明涉及图计算技术领域,是一种基于GPU的图分析通用优化方法及装置,解决了GPU并行图分析算法的性能瓶颈问题。本发明的方法包括:数据集预处理操作:去除图数据的冗余部分,并统一数据集格式;数据分块重排序操作:将数据集分块后,对块内顶点按照出度进行重排序,并将重排序后的图以CSR压缩格式表示;GPU共享内存缓存热顶点操作:利用重排序后的热顶点分布方式,将热顶点的属性数据缓存在GPU端的共享内存中。本方法可以增强图数据的空间局部性,实现图的热顶点共享同一缓存块并驻留在GPU端,避免了热顶点在内存不足时被频繁驱

一种基于图神经网络的云网跨域告警聚类方法和装置.pdf
本公开提供了一种基于图神经网络的云网跨域告警聚类方法和装置。该方法包括:获取告警数据,其中所述告警数据构成告警消息块;按时间序列获取连续的告警消息块;判断是否进入模型训练阶段,若是,则响应于进入所述模型训练阶段,新建告警消息关系图并生成加权多关系图,或者维护告警消息关系图并更新加权多关系图;基于所述多关系图,通过加权多关系图神经网络算法MarGNN来训练告警消息节点的嵌入向量学习模型;输出所述告警消息节点的嵌入向量;以及基于所述嵌入向量,对所述告警消息进行聚类,以获得故障事件类簇。