
一种基于点云的古建筑轮廓提取方法及系统.pdf

邻家****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于点云的古建筑轮廓提取方法及系统.pdf
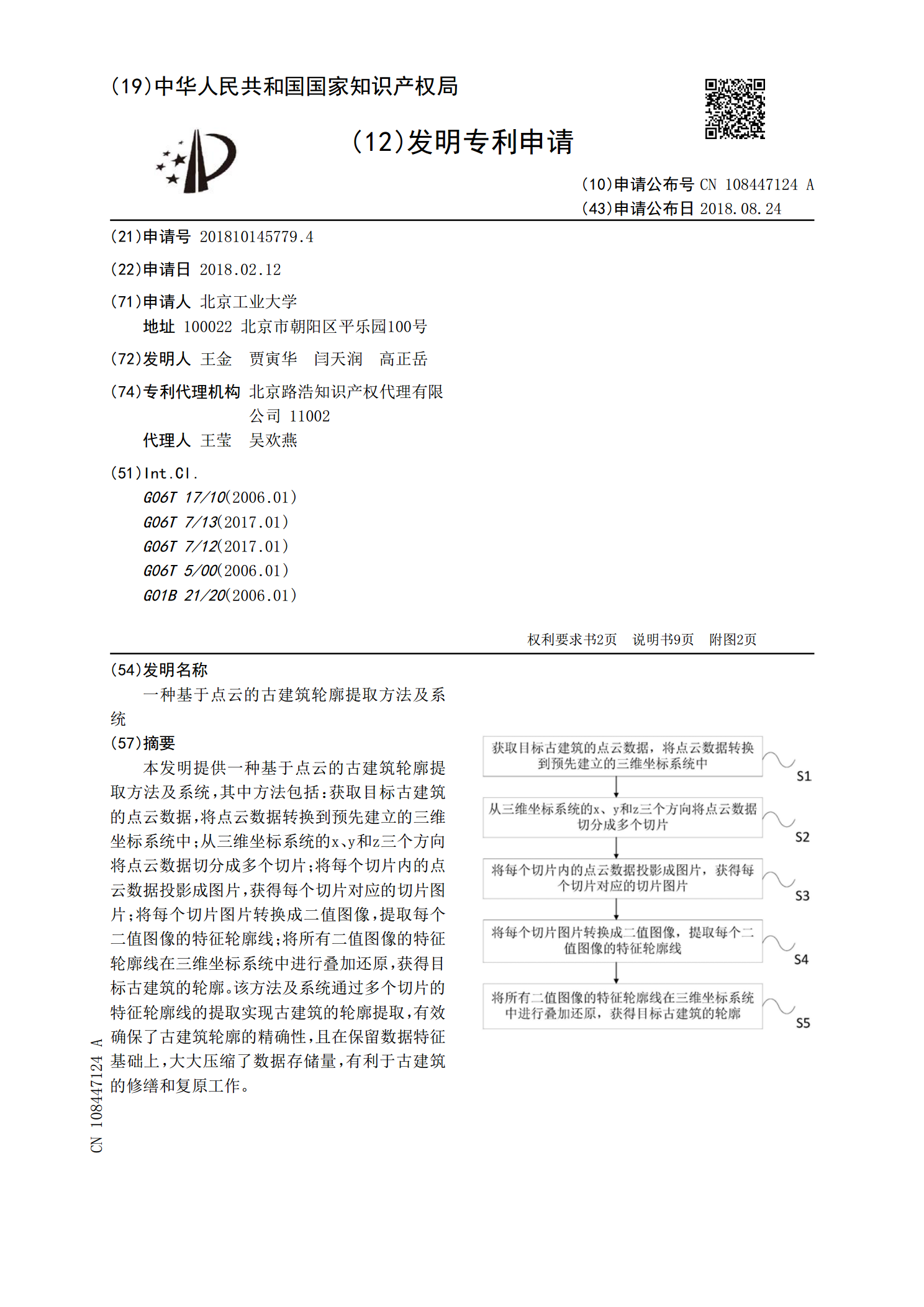
本发明提供一种基于点云的古建筑轮廓提取方法及系统,其中方法包括:获取目标古建筑的点云数据,将点云数据转换到预先建立的三维坐标系统中;从三维坐标系统的x、y和z三个方向将点云数据切分成多个切片;将每个切片内的点云数据投影成图片,获得每个切片对应的切片图片;将每个切片图片转换成二值图像,提取每个二值图像的特征轮廓线;将所有二值图像的特征轮廓线在三维坐标系统中进行叠加还原,获得目标古建筑的轮廓。该方法及系统通过多个切片的特征轮廓线的提取实现古建筑的轮廓提取,有效确保了古建筑轮廓的精确性,且在保留数据特征基础上,
基于增材再制造点云模型的轮廓提取方法.pdf
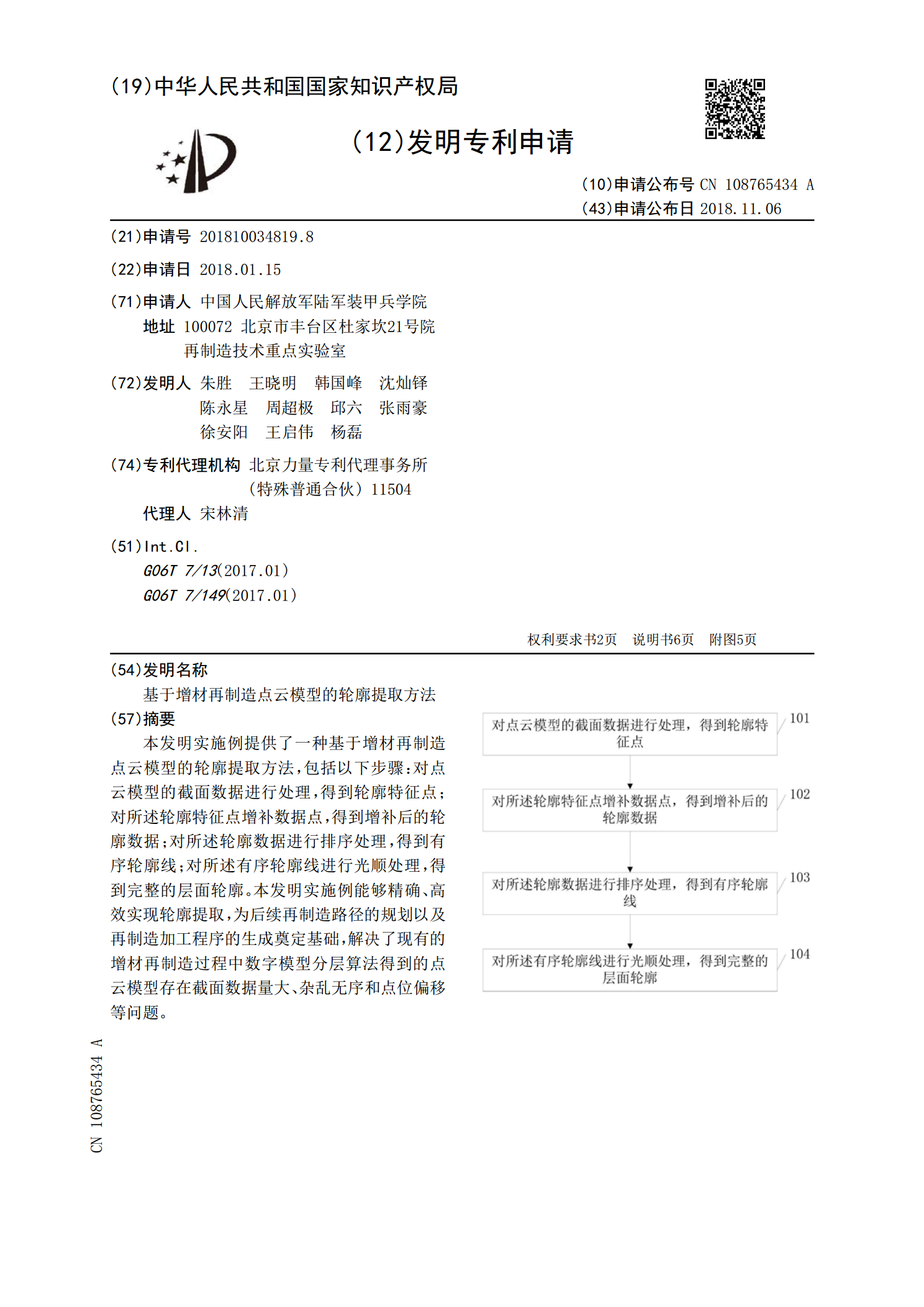
本发明实施例提供了一种基于增材再制造点云模型的轮廓提取方法,包括以下步骤:对点云模型的截面数据进行处理,得到轮廓特征点;对所述轮廓特征点增补数据点,得到增补后的轮廓数据;对所述轮廓数据进行排序处理,得到有序轮廓线;对所述有序轮廓线进行光顺处理,得到完整的层面轮廓。本发明实施例能够精确、高效实现轮廓提取,为后续再制造路径的规划以及再制造加工程序的生成奠定基础,解决了现有的增材再制造过程中数字模型分层算法得到的点云模型存在截面数据量大、杂乱无序和点位偏移等问题。

基于LiDAR点云数据的水体轮廓线提取方法研究.docx
基于LiDAR点云数据的水体轮廓线提取方法研究随着科技的不断发展,LiDAR技术逐渐被应用于水体轮廓线的提取。本文将阐述基于LiDAR点云数据的水体轮廓线提取方法的研究。一、LiDAR技术原理LiDAR技术是利用激光雷达的原理来获取地形高程和三维点云数据的技术。LiDAR设备通过发射激光束来扫描地面,激光束照射到地面时会产生反射,激光雷达系统能够接收到反射回来的激光,通过计算激光来回的时间差和光波速度就可以得出激光束到地面的距离。二、水体轮廓线提取方法1、点云分割点云分割是水体轮廓线提取的前置步骤,其目的

一种基于全局图聚类的平面建筑构件点云轮廓提取方法.pdf
本发明涉及一种基于全局图聚类的平面建筑构件点云轮廓提取方法,该方法包括以下步骤:步骤1:对原始平面建筑三维点云数据采用超体素的几何特征进行表征,获得通过超体素的几何特征进行表征的点云数据;步骤2:针对通过超体素的几何特征进行表征的点云数据构建全局图模型;步骤3:针对全局图模型进行聚类优化并进一步提取得到平面片段;步骤4:从平面片段中提取最终面建筑构件点云轮廓。与现有技术相比,本发明具有轮廓提取精确度高,适用范围广等优点。

一种基于建筑外轮廓线及激光点云的建筑立面提取方法.pdf
本发明提供了一种基于建筑外轮廓线及激光点云的建筑立面提取方法,包括以下步骤:获取建筑物的外轮廓线;选取地平面即XY平面作为投影面,外轮廓线在XY平面上的投影为多线段P1P2……Pn,选取缓冲区;判断三维全景图像中的激光点是否在缓冲区中,从而得到在缓冲区中的所有的激光点;采用过滤算法,将在缓冲区中的所有激光点进行去噪处理后,根据这些激光点及建筑物外轮廓线,生成建筑物立面。本发明所提供的方法解决了现有技术中的不足,能够自动或半自动地生成建筑物立面,大大缩短街景数据生产和数字城市制作周期,具有非常巨大的经济和社